TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025108896
公報種別
公開特許公報(A)
公開日
2025-07-24
出願番号
2024002397
出願日
2024-01-11
発明の名称
ピッキングロボット装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20250716BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ピッキングした対象物を任意の場所に置くプレイス作業において、プレイス時のエラーを低減できるピッキングロボット装置を提供する。
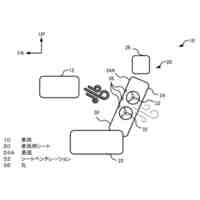
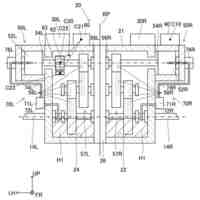
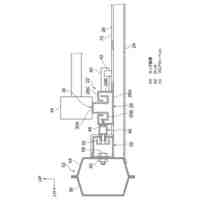
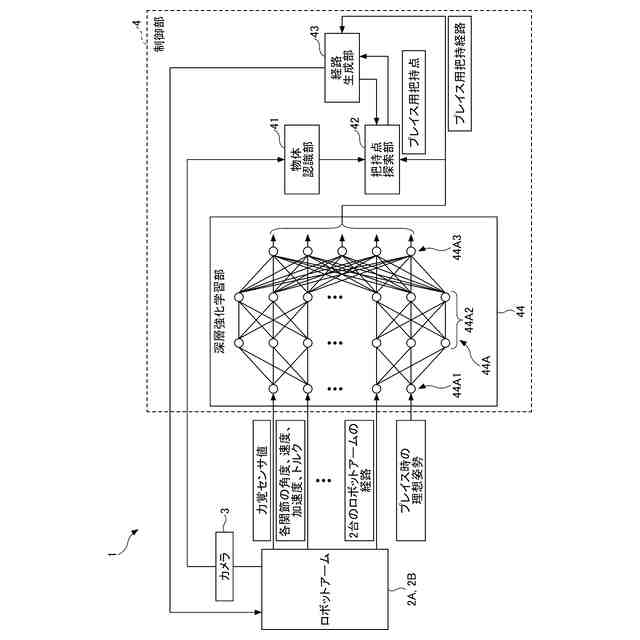
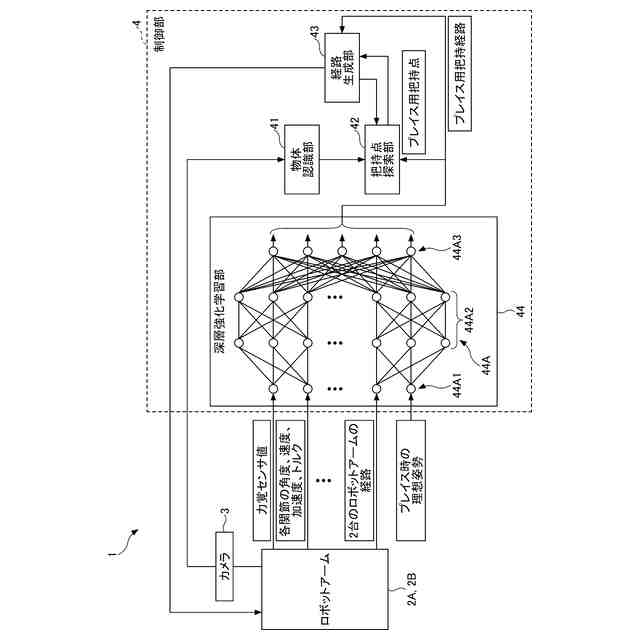
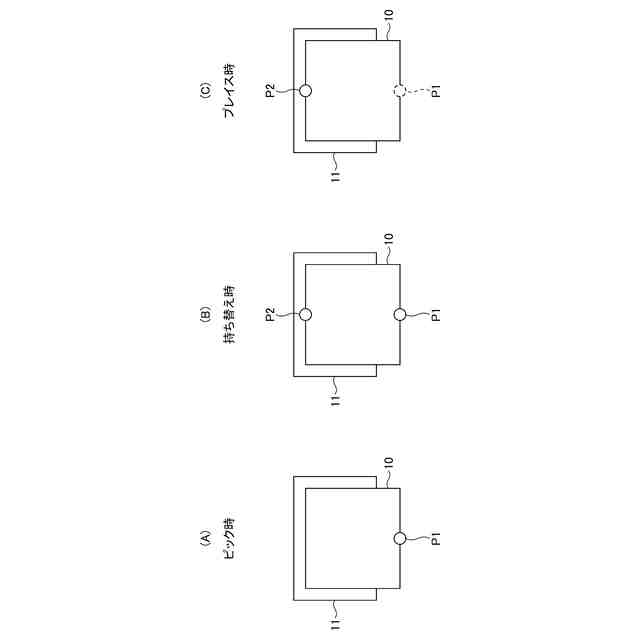
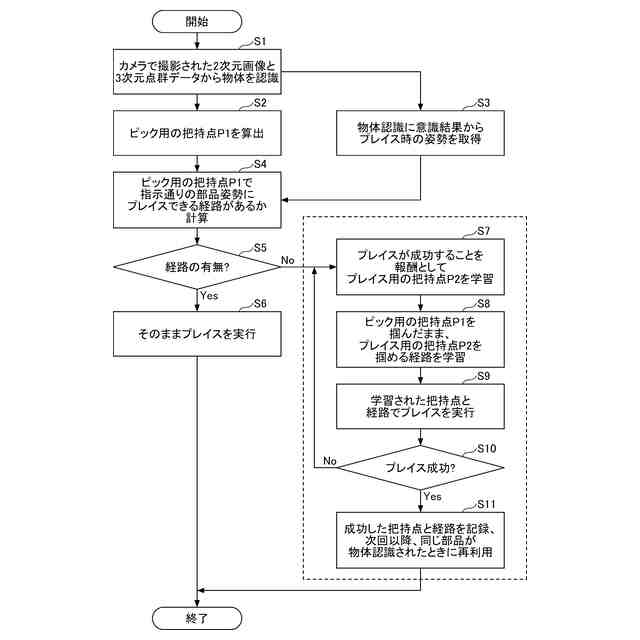
【解決手段】機械学習を用いたピッキングロボット装置1は、二台のロボットアーム2A,2Bを備える。二台のロボットアーム2A,2Bは、一方のロボットアームと他方のロボットアームとの間で対象物10を持ち替え可能である。ピッキングロボット装置1は、対象物10の2次元画像と点群データを取得するカメラ3と、制御部4とを備える。制御部4は、カメラ3により取得された2次元画像及び点群データに基づいて、ピック用の把持点P1でプレイス作業の指示通りの姿勢にプレイスできる経路が存在するかどうかを判定し、経路が無い場合は、プレイス用の把持点P2と、ピック用の把持点P1を掴んだ状態でプレイス用の把持点を掴める経路と、を学習させる。
【選択図】図1
特許請求の範囲
【請求項1】
対象物をピッキングし、ピッキングした対象物を任意の場所に置くプレイス作業を行うピッキングロボット装置であって、
前記対象物を把持可能なハンドがそれぞれに搭載される二台のロボットアームであって、一方の前記ロボットアームが、前記対象物をピッキングする際に前記対象物を把持する位置であるピック用の把持点で前記ハンドにより前記対象物を把持してピッキングを行い、他方の前記ロボットアームが、前記対象物を前記任意の場所に置く際に前記対象物を把持する位置であるプレイス用の把持点で前記ハンドにより前記対象物を把持するように、前記一方のロボットアームと前記他方のロボットアームとの間で前記対象物を持ち替え可能な二台のロボットアームと、
前記対象物の2次元画像と点群データを取得するカメラと、
前記カメラにより取得された前記2次元画像及び前記点群データに基づいて、前記ピック用の把持点で前記プレイス作業の指示通りの姿勢にプレイスできる経路が存在するかどうかを判定し、前記経路が無い場合は、前記プレイス用の把持点と、前記ピック用の把持点を掴んだ状態で前記プレイス用の把持点を掴める経路と、を学習させる制御部と、
を備えるピッキングロボット装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ピッキングロボット装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、箱の中にバラ積みされた複数の把持対象物をロボットアームのハンドによって把持する際に、ハンド通過領域内に含まれる3次元点群データに基づいて対象の物体を把持可能かどうか判定する技術について記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-047505号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1などの従来手法では、ロボットアーム(ピッキングロボット装置)が把持(ピッキング)した対象物を任意の場所に置くプレイス作業中に、ピッキングロボット装置がピッキングしている対象物を空中で持ち替えることができない。このため、プレイス作業において、対象物を所望の場所に置く作業ことができない状況、すなわちプレイス時のエラーの発生に関して改善の余地がある。
【0005】
本開示は、ピッキングした対象物を任意の場所に置くプレイス作業において、プレイス時のエラーを低減できるピッキングロボット装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の実施形態の一観点に係るピッキングロボット装置は、対象物をピッキングし、ピッキングした対象物を任意の場所に置くプレイス作業を行うピッキングロボット装置であって、前記対象物を把持可能なハンドがそれぞれに搭載される二台のロボットアームであって、一方の前記ロボットアームが、前記対象物をピッキングする際に前記対象物を把持する位置であるピック用の把持点で前記ハンドにより前記対象物を把持してピッキングを行い、他方の前記ロボットアームが、前記対象物を前記任意の場所に置く際に前記対象物を把持する位置であるプレイス用の把持点で前記ハンドにより前記対象物を把持するように、前記一方のロボットアームと前記他方のロボットアームとの間で前記対象物を持ち替え可能な二台のロボットアームと、前記対象物の2次元画像と点群データを取得するカメラと、前記カメラにより取得された前記2次元画像及び前記点群データに基づいて、前記ピック用の把持点で前記プレイス作業の指示通りの姿勢にプレイスできる経路が存在するかどうかを判定し、前記経路が無い場合は、前記プレイス用の把持点と、前記ピック用の把持点を掴んだ状態で前記プレイス用の把持点を掴める経路と、を学習させる制御部と、を備える。
【発明の効果】
【0007】
本開示によれば、ピッキングした対象物を任意の場所に置くプレイス作業において、プレイス時のエラーを低減できるピッキングロボット装置を提供することができる。
【図面の簡単な説明】
【0008】
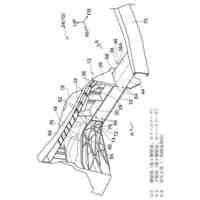
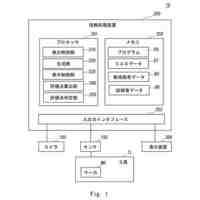
実施形態に係るピッキングロボット装置の概略構成図
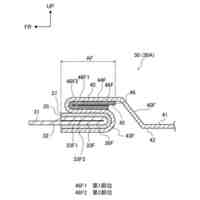
本実施形態における対象物の持ち替え手順を説明する模式図
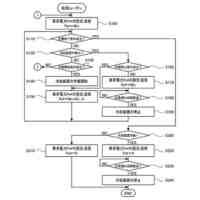
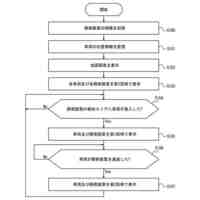
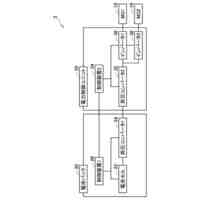
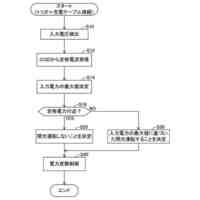
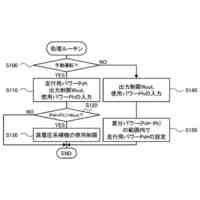
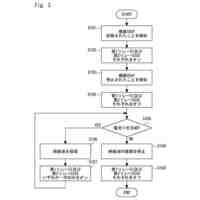
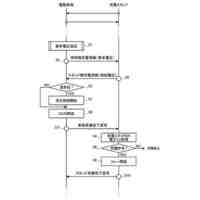
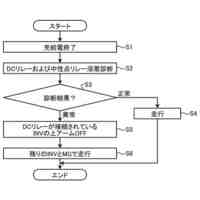
本実施形態におけるプレイス作業のフローチャート
【発明を実施するための形態】
【0009】
以下、添付図面を参照しながら実施形態について説明する。説明の理解を容易にするため、各図面において同一の構成要素に対しては可能な限り同一の符号を付して、重複する説明は省略する。
【0010】
図1は、実施形態に係るピッキングロボット装置1の概略構成図である。ピッキングロボット装置1は、対象物10をピッキング(把持)し、ピッキングした対象物10を任意の場所に置くプレイス作業を行う装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
方法
2日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
方法
19日前
トヨタ自動車株式会社
方法
16日前
トヨタ自動車株式会社
膜体
4日前
トヨタ自動車株式会社
電池
19日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
電動車
18日前
トヨタ自動車株式会社
移動体
18日前
トヨタ自動車株式会社
モータ
18日前
トヨタ自動車株式会社
充電器
19日前
トヨタ自動車株式会社
モータ
16日前
トヨタ自動車株式会社
充電器
16日前
トヨタ自動車株式会社
電動車
19日前
トヨタ自動車株式会社
コネクタ
4日前
トヨタ自動車株式会社
駆動装置
19日前
トヨタ自動車株式会社
駆動装置
18日前
トヨタ自動車株式会社
コネクタ
18日前
トヨタ自動車株式会社
電源装置
18日前
トヨタ自動車株式会社
駆動装置
18日前
トヨタ自動車株式会社
電動車両
4日前
トヨタ自動車株式会社
制御装置
18日前
トヨタ自動車株式会社
評価方法
4日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
電動車両
19日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
充電方法
16日前
トヨタ自動車株式会社
充電設備
4日前
トヨタ自動車株式会社
車両構造
1日前
トヨタ自動車株式会社
電極触媒
17日前
トヨタ自動車株式会社
駆動装置
18日前
トヨタ自動車株式会社
電動車両
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ