TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025117852
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024012805
出願日
2024-01-31
発明の名称
把持装置及びロボット
出願人
国立研究開発法人宇宙航空研究開発機構
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
15/08 20060101AFI20250805BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対象物を把持するための十分な保持力を有し、これを簡易的な機構により達成することができる把持装置及びロボットを提供する。
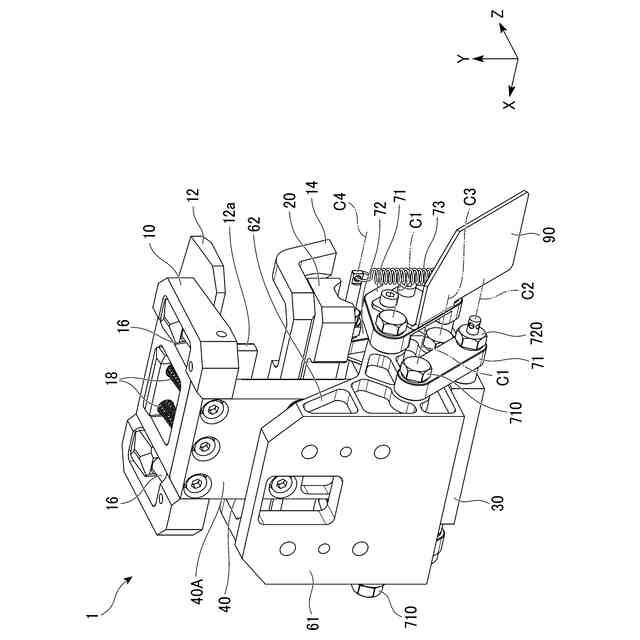
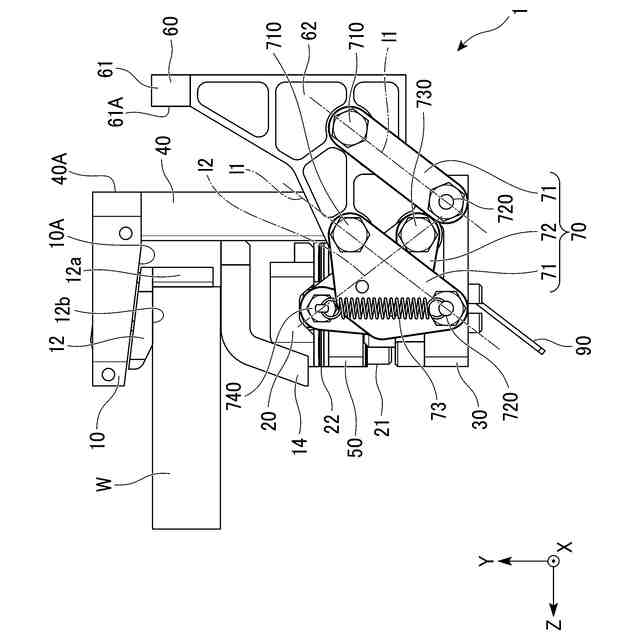
【解決手段】第1方向に並んで配置され、対象物を把持する第1パッド(スライダー12)および第2パッド20と、前記第1パッドを支持する第1台座10と、前記第1方向において前記第2パッド20を間に挟んで前記第1台座10の反対側に位置する第2台座30と、前記第1台座10と前記第2台座30とを接続する背面支持部40と、前記第2パッド20に連結される連結部50と、前記第2台座30および前記連結部50に接続されるとともに、前記第1方向に交差する第2方向において、前記背面支持部40を、前記第1台座10の反対側から覆うハウジング60と、を備える把持装置1であって、前記把持装置1は、第1リンク71と第2リンク72とを有するリンク機構70を備えることを特徴とする把持装置1。
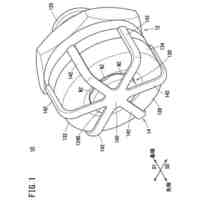
【選択図】図1
特許請求の範囲
【請求項1】
第1方向に並んで配置され、対象物を把持する第1パッドおよび第2パッドと、
前記第1パッドを支持する第1台座と、
前記第1方向において前記第2パッドを間に挟んで前記第1台座の反対側に位置する第2台座と、
前記第1台座と前記第2台座とを接続する背面支持部と、
前記第2パッドに連結される連結部と、
前記第2台座および前記連結部に接続されるとともに、前記第1方向に交差する第2方向において、前記背面支持部を、前記第1台座の反対側から覆うハウジングと、
を備える把持装置であって、
前記把持装置は、第1リンクと第2リンクとを有するリンク機構を備え、
前記第1リンクは前記ハウジングと前記第2台座とを接続し、
前記第2リンクは前記ハウジングと前記連結部とを接続し、
前記連結部は、前記第1方向において移動可能であり、かつ前記第2パッドと前記第2台座又は前記第2パッドと前記背面支持部とを連結し、
前記対象物を把持する際に、前記第1方向と交差する第2方向において前記背面支持部と前記ハウジングが相対的に近接し、前記第1リンクと前記第2リンクの間の角度が開くことで、前記第1パッドと前記第2パッドが前記第1方向において相対的に近接し、
前記第1リンクと前記第2リンクの間の角度が180度となる状態を前記リンク機構の特異点とするとき、前記特異点から前記第1リンクと前記第2リンクの間の角度がさらに開くことで、前記第1パッドおよび前記第2パッドがロック状態となる、
ことを特徴とする把持装置。
続きを表示(約 720 文字)
【請求項2】
前記背面支持部に接続され、前記第1台座と前記第2パッドの間に位置するガイドと、
前記第1台座に接続され、前記第1方向に対して傾斜する方向に移動可能であり、かつ前記第1パッドとして機能するスライダーをさらに備え、
前記スライダーが前記第1方向に延在する係止部を有し、前記対象物を把持する際に、前記係止部が前記対象物と当接することで、前記対象物が前記スライダーおよび前記ガイドによって挟み込まれるまでの間、前記スライダーが前記第2方向へ移動する、
ことを特徴とする請求項1に記載の把持装置。
【請求項3】
前記ハウジング又は前記背面支持部に、前記第2方向における前記背面支持部と前記ハウジングとの間隔を調整可能な調整機構が設けられ、
前記調整機構が解除されることによって、前記ロック状態から、前記第2方向において前記背面支持部と前記ハウジングが相対的に近接することで、前記第1リンクと前記第2リンクの間の角度がさらに開き、前記ロック状態が解除される、
ことを特徴とする請求項1又は2に記載の把持装置。
【請求項4】
請求項1又は2に記載の把持装置と、
伸縮可能なアームを備える本体と、を含み、
前記アームの端部に前記把持装置が設けられている、
ことを特徴とするロボット。
【請求項5】
前記把持装置の前記第1リンクにミラーが設けられ、
前記本体に、前記ミラーへ向けて光を発することが可能な発光部と、前記ミラーから反射した光を受光可能な受光部が設けられている、
ことを特徴とする請求項4に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、把持装置及びロボットに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
従来から、例えば特許文献1に開示されているようなロボットが知られている。このロボットは、円筒形のスペースデブリ等の対象物を回収するための伸縮デバイスを備えている。
【先行技術文献】
【特許文献】
【0003】
日本国特開2021-41504号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述のようなロボットにおいては、対象物を掴んで保持するための保持力の向上が望まれていた。また、より簡易的な機構であることが望まれていた。
【0005】
本発明は、上記に鑑みてなされたものであり、対象物を把持するための十分な保持力を有し、これを簡易的な機構により達成することができる把持装置及びロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)本発明の一態様に係る把持装置は、
第1方向に並んで配置され、対象物を把持する第1パッドおよび第2パッドと、
前記第1パッドを支持する第1台座と、
前記第1方向において前記第2パッドを間に挟んで前記第1台座の反対側に位置する第2台座と、
前記第1台座と前記第2台座とを接続する背面支持部と、
前記第2パッドに連結される連結部と、
前記第2台座および前記連結部に接続されるとともに、前記第1方向に交差する第2方向において、前記背面支持部を、前記第1台座の反対側から覆うハウジングと、
を備える把持装置であって、
前記把持装置は、第1リンクと第2リンクとを有するリンク機構を備え、
前記第1リンクは前記ハウジングと前記第2台座とを接続し、
前記第2リンクは前記ハウジングと前記連結部とを接続し、
前記連結部は、前記第1方向において移動可能であり、かつ前記第2パッドと前記第2台座又は前記第2パッドと前記背面支持部とを連結し、
前記対象物を把持する際に、前記第1方向と交差する第2方向において前記背面支持部と前記ハウジングが相対的に近接し、前記第1リンクと前記第2リンクの間の角度が開くことで、前記第1パッドと前記第2パッドが前記第1方向において相対的に近接し、
前記第1リンクと前記第2リンクの間の角度が180度となる状態を前記リンク機構の特異点とするとき、前記特異点から前記第1リンクと前記第2リンクの間の角度がさらに開くことで、前記第1パッドおよび前記第2パッドがロック状態となる、
ことを特徴とする。
上記の構成からなる把持装置は、第1リンクと第2リンクとを有するリンク機構を備え、対象物を把持する際に、第1リンクと第2リンクの間の角度が開くことで、第1パッドと第2パッドが相対的に近接し、特異点から第1リンクと第2リンクの間の角度がさらに開くことで、第1パッドおよび第2パッドがロック状態となる。このため、対象物を把持するための十分な保持力が得られる。また、把持装置を制御するための駆動部などを必要とせず、簡易的な機構により十分な保持力を達成することができる。
【0007】
(2)上記(1)に記載の把持装置では、
前記背面支持部に接続され、前記第1台座と前記第2パッドの間に位置するガイドと、
前記第1台座に接続され、前記第1方向に対して傾斜する方向に移動可能であり、かつ前記第1パッドとして機能するスライダーをさらに備え、
前記スライダーが前記第1方向に延在する係止部を有し、前記対象物を把持する際に、前記係止部が前記対象物と当接することで、前記対象物が前記スライダーおよび前記ガイドによって挟み込まれるまでの間、前記スライダーが前記第2方向へ移動するようにしてもよい。
(3)上記(1)又は(2)に記載の把持装置では、
前記ハウジング又は前記背面支持部に、前記第2方向における前記背面支持部と前記ハウジングとの間隔を調整可能な調整機構が設けられ、
前記調整機構が解除されることによって、前記ロック状態から、前記第2方向において前記背面支持部と前記ハウジングが相対的に近接することで、前記第1リンクと前記第2リンクの間の角度がさらに開き、前記ロック状態が解除されるようにしてもよい。
【0008】
(4)本発明の一態様に係るロボットは、
上記(1)から(3)のいずれか1項に記載の把持装置と、
伸縮可能なアームを備える本体と、を含み、
前記アームの端部に前記把持装置が設けられている、
ことを特徴とする。
(5)上記(4)に記載のロボットでは、
前記把持装置の前記第1リンクにミラーが設けられ、
前記本体に、前記ミラーへ向けて光を発することが可能な発光部と、前記ミラーから反射した光を受光可能な受光部が設けられていてもよい。
【発明の効果】
【0009】
本発明に係る把持装置及びロボットは、対象物を把持するための十分な保持力を有し、これを簡易的な機構により達成することができる。
【図面の簡単な説明】
【0010】
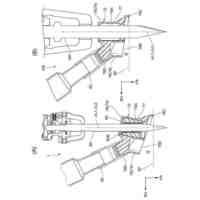
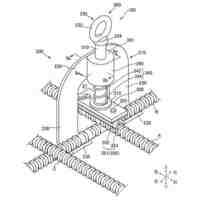
本発明の一態様に係る把持装置の斜視図である。
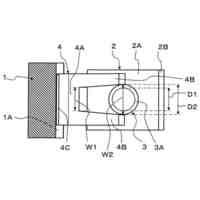
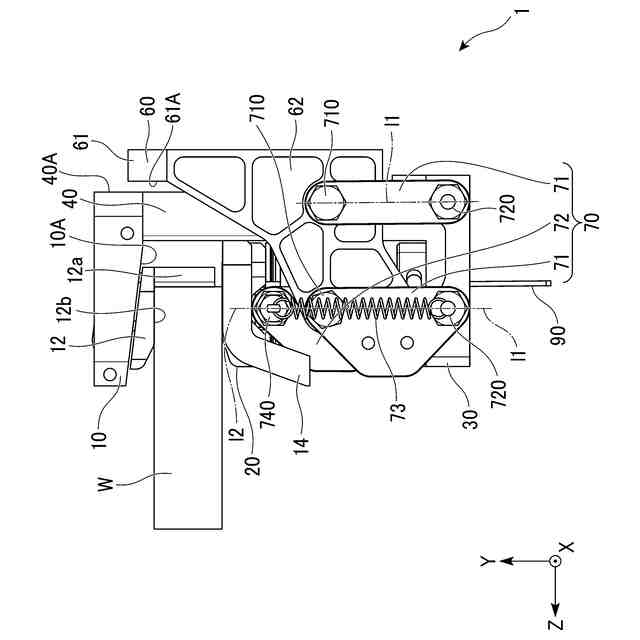
本発明の一態様に係る把持装置をハウジング側から見た斜視図である。
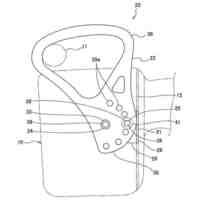
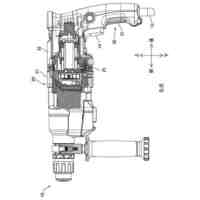
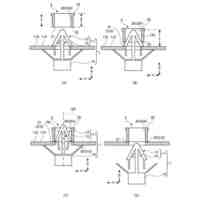
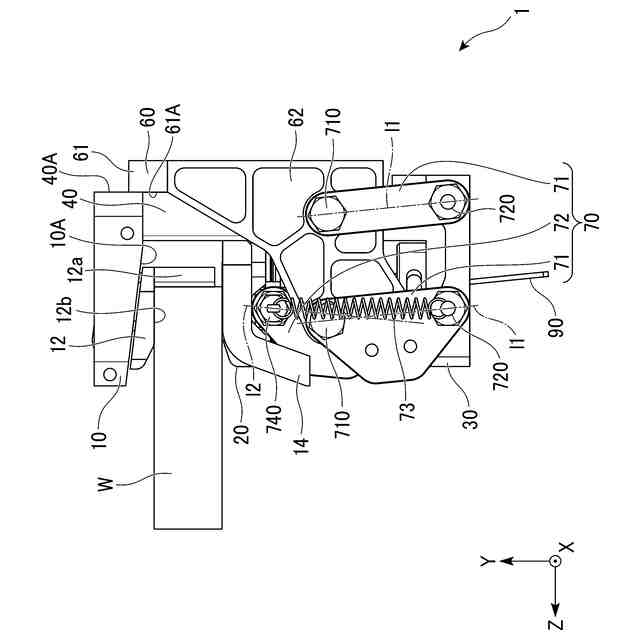
本発明の一態様に係る把持装置を用いて対象物を把持する態様を説明するための図であって、第3方向において把持装置を見た側面図である。
本発明の一態様に係る把持装置を用いて対象物を把持する態様を説明するための図であって、第3方向において把持装置を見た側面図である。
本発明の一態様に係る把持装置を用いて対象物を把持する態様を説明するための図であって、第3方向において把持装置を見た側面図である。
本発明の一態様に係る把持装置を用いて対象物を把持する態様を説明するための図であって、第3方向において把持装置を見た側面図である。
本発明の一態様に係る把持装置を用いて対象物を把持する態様を説明するための図であって、第3方向において把持装置を見た側面図である。
本発明の一態様に係る把持装置を用いて対象物を把持する態様を説明するための図であって、第3方向において把持装置を見た側面図である。
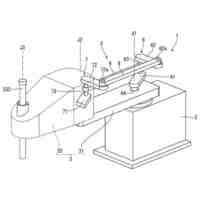
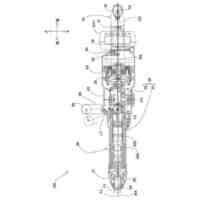
本発明の一態様に係る把持装置の調整機構の一形態を説明するための把持装置の斜視図である。
本発明の一態様に係る把持装置の調整機構の他の形態を説明するための把持装置の斜視図である。
本発明の一態様に係る把持装置の調整機構の他の形態を説明するための把持装置の斜視図である。
図10および図11の調整機構の動作を説明するための把持装置の平面図である。
図10および図11の調整機構の動作を説明するための図であって、ロック状態の把持装置の断面図である。
図10および図11の調整機構の動作を説明するための図であって、リリース状態の把持装置の断面図である。
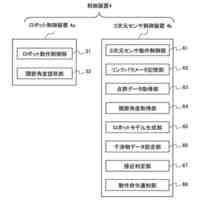
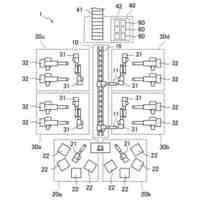
本発明の一態様に係るロボットを説明するための斜視図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
搬送装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
1か月前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
アピュアン株式会社
衝撃工具
1か月前
積水ハウス株式会社
フィルム除去具
9日前
ホシデン株式会社
分解用治具
1か月前
株式会社マキタ
電気機器
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
14日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社不二越
ロボットシステム
3日前
株式会社清水製作所
電動工具の吊下げ具
18日前
コネクテッドロボティクス株式会社
保持システム
11日前
セイコーエプソン株式会社
ロボット
1か月前
川崎重工業株式会社
作業設備
15日前
工機ホールディングス株式会社
集塵装置及び作業機
1か月前
株式会社マキタ
打撃工具
14日前
タイガー産業株式会社
アタッチメント
1日前
株式会社マキタ
打撃工具
18日前
北越メタル株式会社
鉄筋保持具
14日前
AMATAMA株式会社
制御装置
1か月前
日産自動車株式会社
ロックプレートの圧入治具
1か月前
株式会社永木精機
締結用回動体
1か月前
コネクテッドロボティクス株式会社
ロボットシステム
11日前
個人
工具、工具セット、部材取外し方法
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ