TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025118117
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024013247
出願日
2024-01-31
発明の名称
フローティングユニット
出願人
I-PEX株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B25J
17/02 20060101AFI20250805BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】一部の方向のフローティングを停止すること。
【解決手段】実施形態の一態様に係るフローティングユニットは、フローティング部と、フローティング方向制限部とを備える。フローティング部は、回転軸回りの方向、回転軸と直交する第1方向、および、回転軸および第1方向の各々と直交する第2方向に移動可能である。フローティング方向制限部は、フローティング部に対して回転軸の延伸方向に移動可能である。フローティング部は、回転軸を中心とした環状または弧状の1以上の第1溝を含む第1溝部と、第1溝部に配置される複数のボールとを備える。フローティング方向制限部は、第1方向に延在する1以上の第2溝を含む第2溝部を備える。フローティング方向制限部が第1溝部に近づく方向に移動された場合、第1溝部に配置された状態の複数のボールが第2溝部に嵌まり、フローティング部の第2方向への移動が規制される。
【選択図】図6
特許請求の範囲
【請求項1】
回転軸回りの方向、前記回転軸と直交する第1方向、および、前記回転軸および前記第1方向の各々と直交する第2方向に移動可能なフローティング部と、
前記フローティング部に対して前記回転軸の延伸方向に移動可能なフローティング方向制限部と、を備え、
前記フローティング部は、
前記回転軸を中心とした環状または弧状の1以上の第1溝を含む第1溝部と、
前記第1溝部に配置される複数のボールと、を備え、
前記フローティング方向制限部は、
前記第1方向に延在する1以上の第2溝を含む第2溝部を備え、
前記フローティング方向制限部が前記第1溝部に近づく方向に移動された場合、前記第1溝部に配置された状態の前記複数のボールが前記第2溝部に嵌まり、前記フローティング部の前記第2方向への移動が規制される
ことを特徴とするフローティングユニット。
続きを表示(約 2,100 文字)
【請求項2】
回転軸回りの方向、前記回転軸と直交する第1方向、および、前記回転軸および前記第1方向の各々と直交する第2方向に移動可能なフローティング部と、
前記フローティング部に対して前記回転軸の延伸方向に移動可能なフローティング方向制限部と、を備え、
前記フローティング部は、
前記第1方向に延在する1以上の第1溝を含む第1溝部と、
前記第1溝部に配置される複数のボールと、を備え、
前記フローティング方向制限部は、
前記回転軸を中心とした環状または弧状の1以上の第2溝を含む第2溝部を備え、
前記フローティング方向制限部が前記第1溝部に近づく方向に移動された場合、前記第1溝部に配置された状態の前記複数のボールが前記第2溝部に嵌まり、前記フローティング部の前記第2方向への移動が規制される
ことを特徴とするフローティングユニット。
【請求項3】
回転軸回りの方向、前記回転軸と直交する第1方向、および、前記回転軸および前記第1方向の各々と直交する第2方向に移動可能なフローティング部と、
前記フローティング部に対して前記回転軸の延伸方向に移動可能なフローティング方向制限部と、を備え、
前記フローティング部は、
前記第1方向に延在する1以上の第1溝を含む第1溝部と、
前記第1溝部に配置される複数のボールと、を備え、
前記フローティング方向制限部は、
前記第2方向に延在する1以上の第2溝を含む第2溝部を備え、
前記フローティング方向制限部が前記第1溝部に近づく方向に移動された場合、前記第1溝部に配置された状態の前記複数のボールが前記第2溝部に嵌まり、前記フローティング部の前記回転軸回りの方向への移動が規制される
ことを特徴とするフローティングユニット。
【請求項4】
回転軸回りの方向、前記回転軸と直交する第1方向、および、前記回転軸および前記第1方向の各々と直交する第2方向に移動可能なフローティング部と、
前記フローティング部に対して前記回転軸の延伸方向に移動可能なフローティング方向制限部と、を備え、
前記フローティング部は、
前記回転軸を中心とした環状または弧状の1以上の第1溝を含む第1溝部と、
前記第1溝部に配置される複数のボールと、を備え、
前記フローティング方向制限部は、
前記回転軸を中心とした環状または弧状の1以上の第2溝を含む第2溝部を備え、
前記フローティング方向制限部が前記第1溝部に近づく方向に移動された場合、前記第1溝部に配置された状態の前記複数のボールが前記第2溝部に嵌まり、前記フローティング部の前記第1方向および前記第2方向の各々への移動が規制される
ことを特徴とするフローティングユニット。
【請求項5】
前記フローティング部は、
前記第1溝部に配置された前記複数のボールを回転可能に保持する保持部を備える
ことを特徴とする請求項1~4のいずれか1つに記載のフローティングユニット。
【請求項6】
前記回転軸の延伸方向に移動可能な第1係合部を備え、
前記フローティング部は、
前記第1係合部が前記回転軸の延伸方向に移動した場合に前記第1係合部と係合する第2係合部を備え、
前記第1係合部と前記第2係合部との係合によって、前記第1方向および前記第2方向の各々への前記フローティング部の移動が規制される
ことを特徴とする請求項1~4のいずれか1つに記載のフローティングユニット。
【請求項7】
前記第1係合部と前記第2係合部との係合によって、前記回転軸回りの方向、前記第1方向、および前記第2方向の各々への前記フローティング部の移動が規制される
ことを特徴とする請求項6に記載のフローティングユニット。
【請求項8】
第1磁性体を備え、
前記フローティング部は、
前記第1磁性体と対向する位置に設けられ、前記第1磁性体と磁極が異なる第2磁性体を備え、
前記第1磁性体と前記第2磁性体との吸着力によって、前記回転軸の方向、前記第1方向、および前記第2方向の各々の原点位置に前記フローティング部を復帰させる
ことを特徴とする請求項1~4のいずれか1つに記載のフローティングユニット。
【請求項9】
前記第2溝部は、
前記第2溝を複数有し、
複数の前記第2溝は、
前記第1方向に各々延在し前記第2方向に並べられて配置される
ことを特徴とする請求項1に記載のフローティングユニット。
【請求項10】
前記第2方向は、
前記フローティング部に取り付けられる保持ユニットによって保持される接続対象物の被接続対象物への接続方向と直交する方向である
ことを特徴とする請求項1~4のいずれか1つに記載のフローティングユニット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
開示の実施形態は、フローティングユニットに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
電気機器などの製造工程は、コネクタや板状の配線部材などの接続対象物を別のコネクタなどの被接続対象物に接続する工程を含む場合があり、かかる工程は、近年、ロボットなどを活用した自動的な搬送による自動化が進められている。例えば、ロボットのアームの先端に接続対象物を保持する保持部を取り付け、ロボットのアームを制御することで、接続対象物を被接続対象物に接続する技術が知られている。
【0003】
接続対象物を被接続対象物に接続する際に、接続対象物と被接続対象物との位置合わせに誤差があると、被接続対象物に接続対象物を接続することができない場合がある。そこで、ロボットのアームと、接続対象物を保持する保持部との間にフローティングユニットを設け、かかるフローティングユニットによって接続対象物と被接続対象物との位置合わせの誤差を補正する技術が知られている。フローティングユニットは、コンプライアンスユニットなどとも呼ばれる場合がある。
【0004】
特許文献1には、相互に変位可能に連結したボディとテーブルとの間に、それらの中心軸線に対して直交し且つ互いに直交するX軸方向およびY軸方向と、中心軸線の周りのθ回転方向とについてのフローティング機能を発揮するフローティングユニットが開示されている。かかるフローティングユニットでは、ボディに設けられた複数のシリンダのピストンを駆動させてテーブルを拘束することにより、ボディとテーブルとの位置がずれた状態で固定することができる。
【先行技術文献】
【特許文献】
【0005】
特開2003-170383号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に記載のフローティングユニットでは、X軸方向、Y軸方向、およびθ回転方向のすべての方向でのフローティング機能のオンとオフを行うことができるものの、X軸方向およびY軸方向のうちの一方のフローティングを停止することができない。
【0007】
実施形態の一態様は、上記に鑑みてなされたものであって、一部の方向のフローティングを停止することができるフローティングユニットを提供することを目的とする。
【課題を解決するための手段】
【0008】
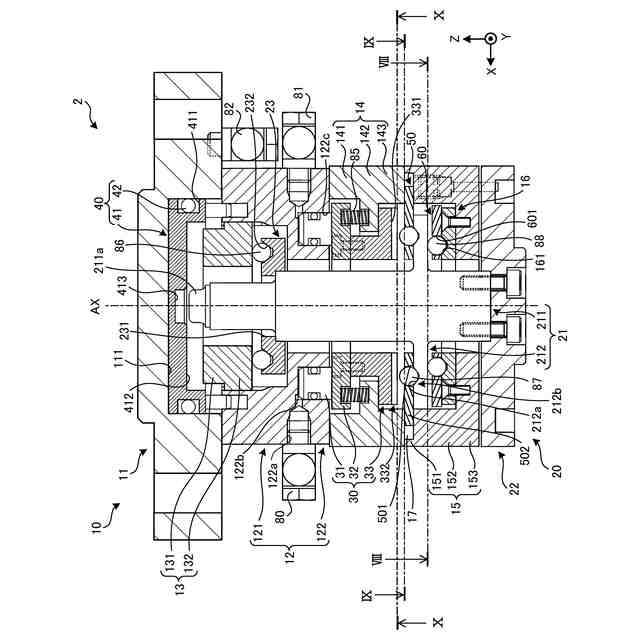
実施形態の一態様に係るフローティングユニットは、フローティング部と、フローティング方向制限部とを備える。フローティング部は、回転軸回りの方向、回転軸と直交する第1方向、および、回転軸および第1方向の各々と直交する第2方向に移動可能である。フローティング方向制限部は、フローティング部に対して回転軸の延伸方向に移動可能である。フローティング部は、回転軸を中心とした環状または弧状の1以上の第1溝を含む第1溝部と、第1溝部に配置される複数のボールとを備える。フローティング方向制限部は、第1方向に延在する1以上の第2溝を含む第2溝部を備える。フローティング方向制限部が第1溝部に近づく方向に移動された場合、第1溝部に配置された状態の複数のボールが第2溝部に嵌まり、フローティング部の第2方向への移動が規制される。
【発明の効果】
【0009】
実施形態の一態様によれば、一部の方向のフローティングを停止することができる。
【図面の簡単な説明】
【0010】
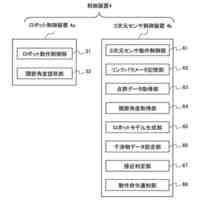
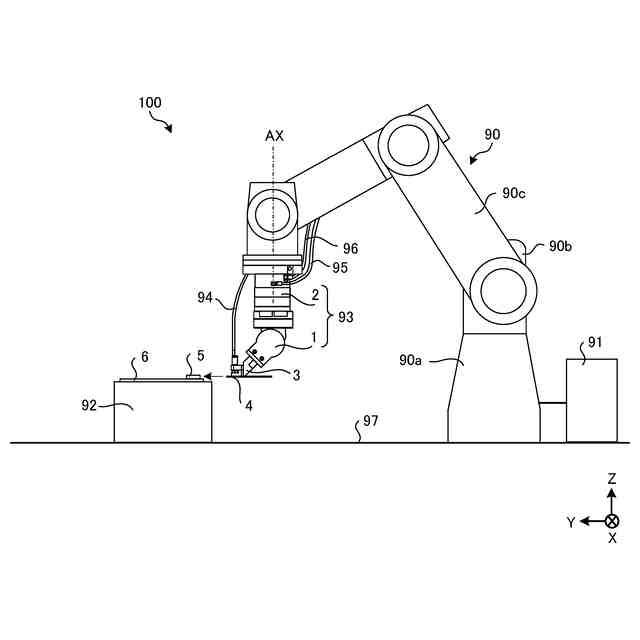
図1は、実施形態に係る組立システムの構成の一例を示す図である。
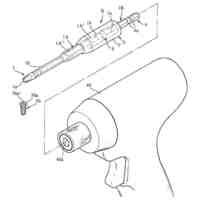
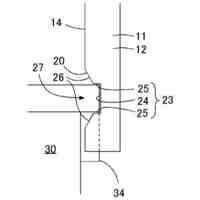
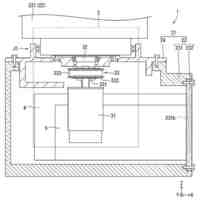
図2は、実施形態に係る接続治具および保持部の一例を示す斜視図である。
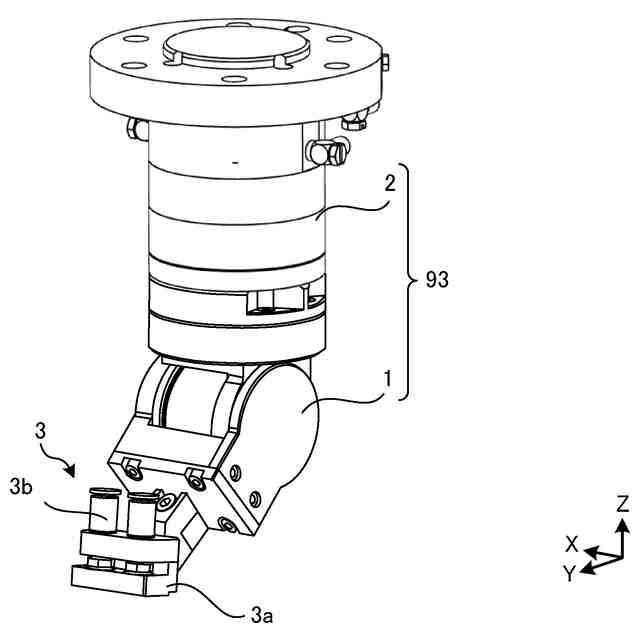
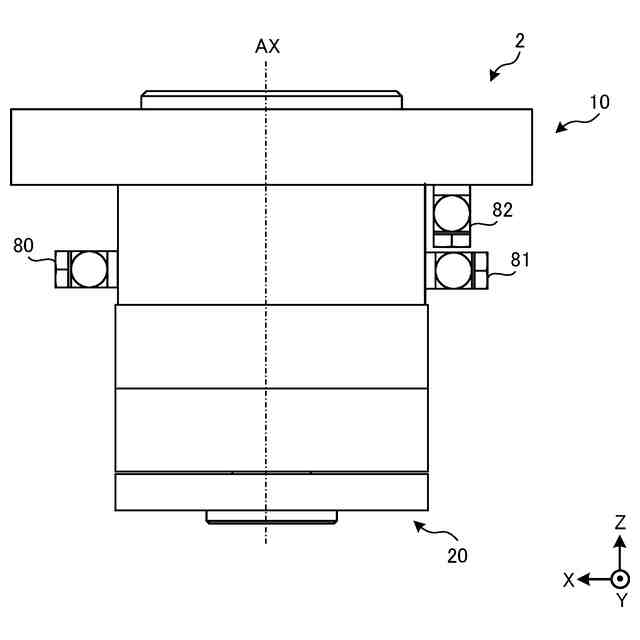
図3は、実施形態に係るフローティングユニットの一例を示す側面図である。
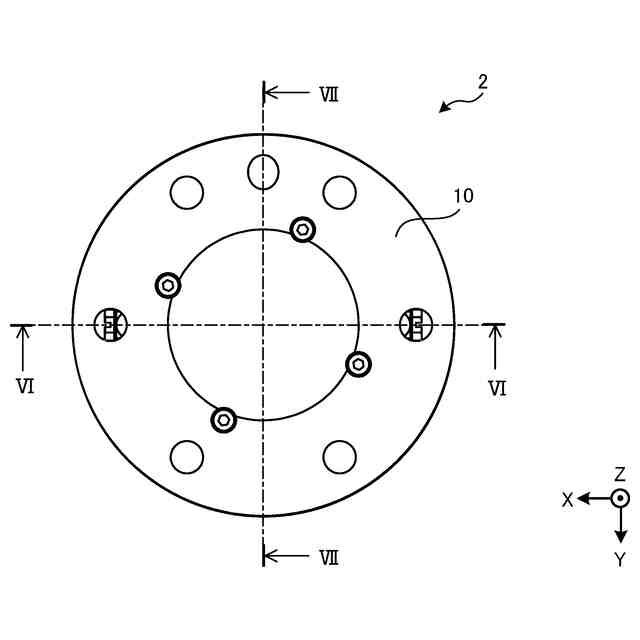
図4は、実施形態に係るフローティングユニットの一例を示す上面図である。
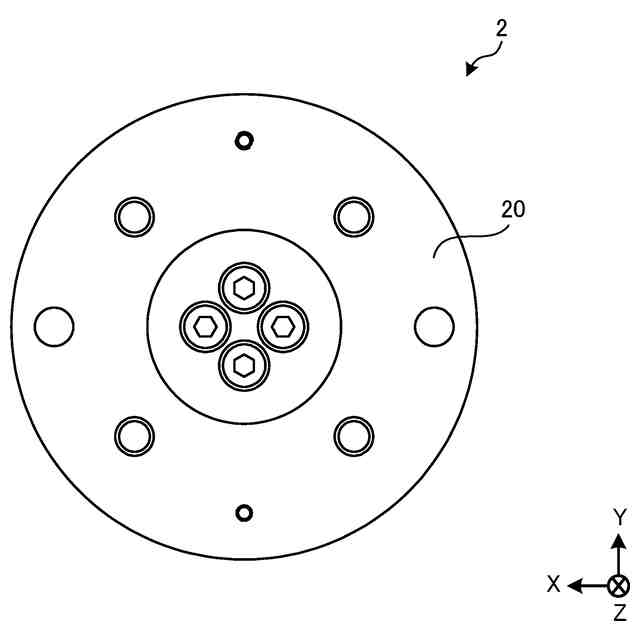
図5は、実施形態に係るフローティングユニットの一例を示す下面図である。
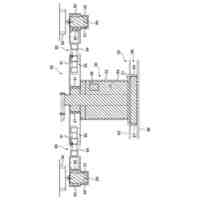
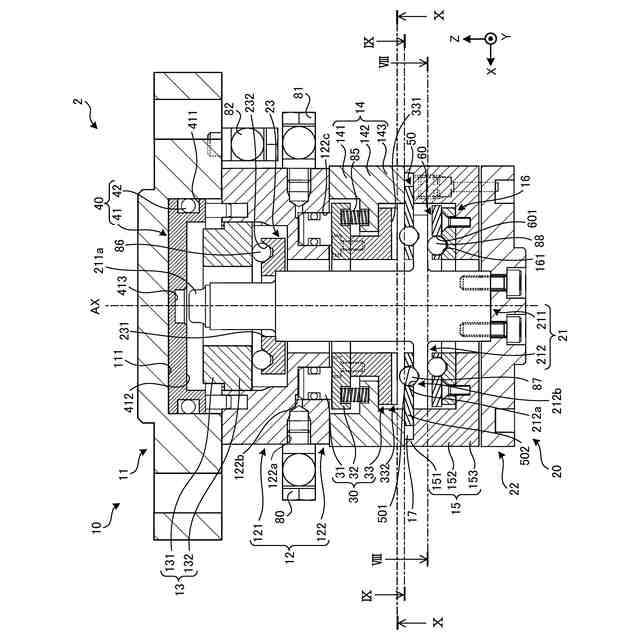
図6は、図4に示すVI-VI線に沿った断面図である。
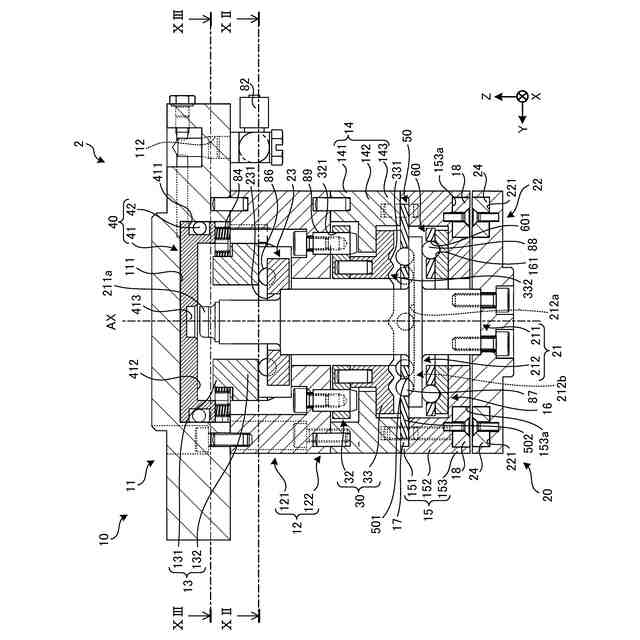
図7は、図4に示すVII-VII線に沿った断面図である。
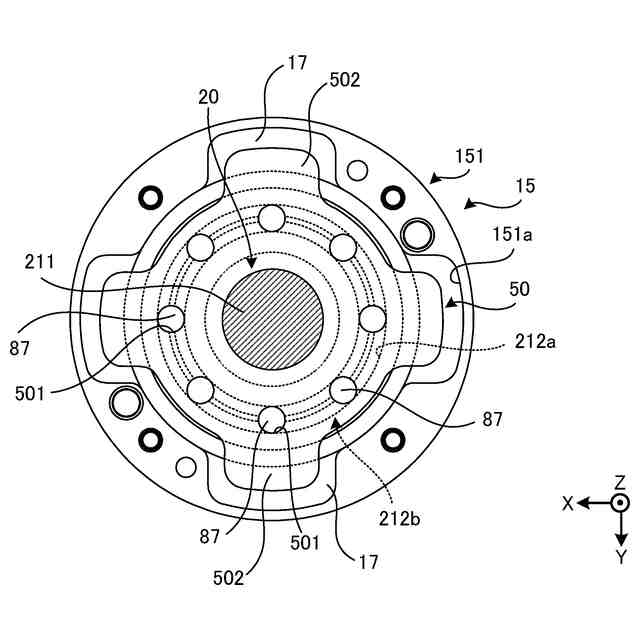
図8は、図6に示すVIII-VIII線に沿った断面図である。
図9は、図6に示すIX-IX線に沿った断面図である。
図10は、図6に示すX-X線に沿った断面図である。
図11は、実施形態に係るフローティングユニットにおけるフローティング部の突出部と固定部の溝との関係の一例を示す図であって図9に相当する断面図である。
図12は、図7に示すXII-XII線に沿った断面図である。
図13は、図7に示すXIII-XIII線に沿った断面図である。
図14は、実施形態に係るフローティング方向制限部の対向部の一例を示す斜視図である。
図15は、実施形態に係るフローティングユニットの柱状部の一例を示す斜視図である。
図16は、実施形態に係るフローティングユニットの柱状部の他の例を示す上面図である。
図17は、実施形態に係る第1保持部の一例を示す斜視図である。
図18は、実施形態に係るフローティング方向制限部が作用した場合の図6に相当する図である。
図19は、実施形態に係るフローティング方向制限部が作用した場合の図7に相当する図である。
図20は、実施形態に係る第1係合部と第2係合部とが係合した場合の図7に相当する図である。
図21は、実施形態に係るフローティングユニットの柱状部のさらに他の例を示す上面図である。
図22は、実施形態に係るフローティング方向制限部の対向部の他の例を示す下面図である。
図23は、実施形態に係るフローティング方向制限部の対向部のさらに他の例を示す下面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
1か月前
株式会社三協システム
製函機
29日前
川崎重工業株式会社
ロボット
8日前
株式会社不二越
ロボット
7日前
株式会社竹中工務店
補助セット
7日前
株式会社三協システム
移載装置
28日前
CKD株式会社
把持装置
1か月前
株式会社不二越
ロボット操作装置
1か月前
株式会社不二越
ロボットシステム
1か月前
株式会社ミクロブ
把持装置
1か月前
SMC株式会社
着脱装置
29日前
日本精工株式会社
締結用工具
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
株式会社不二越
移動ロボットシステム
10日前
トヨタ自動車株式会社
ロボット
2日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
ロボットシステム
28日前
本田技研工業株式会社
装置
13日前
株式会社不二越
エッジ仕上げ装置
20日前
株式会社不二越
ロボットシステム
1か月前
トヨタ自動車株式会社
歩行ロボット
1か月前
トヨタ自動車株式会社
軌道生成装置
2日前
株式会社不二越
垂直多関節ロボット
21日前
大和ハウス工業株式会社
ねじ回転工具
29日前
アネックスツール株式会社
ドライバービット
6日前
ダイハツ工業株式会社
移載治具
1か月前
ライオン株式会社
移載システム
22日前
シンフォニアテクノロジー株式会社
搬送装置
10日前
株式会社不二越
ロボットシステム
1か月前
株式会社マキタ
回転打撃工具
2日前
ワールド技研株式会社
ロボットセル装置
7日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
20日前
セイコーエプソン株式会社
ロボット
6日前
セイコーエプソン株式会社
ロボット
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ