TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025119988
公報種別
公開特許公報(A)
公開日
2025-08-15
出願番号
2024015166
出願日
2024-02-02
発明の名称
車線推定装置
出願人
トヨタ自動車株式会社
,
株式会社松尾製作所
代理人
個人
,
個人
,
個人
,
個人
主分類
G08G
1/09 20060101AFI20250807BHJP(信号)
要約
【課題】高度な画像処理を行うことなく、自車両が走行する走行車線の位置を推定する。
【解決手段】車線推定装置は、第1の車両に搭載され該第1の車両が走行する走行車線を推定する装置であって、位置情報取得部と、通信部と、制御部とを含む。位置情報取得部は、第1の車両の位置を示す第1の位置情報を取得する。通信部は、第1の車両と異なる車両と通信可能に構成される。制御部は、第1の車両の周辺を走行する第2の車両から、通信部を介して、第2の車両の走行車線を示す走行車線情報、および、第2の車両の位置を示す第2の位置情報を取得する。制御部は、時系列で取得された複数の第1の位置情報に基づく第1の車両の第1の走行軌跡、時系列で取得された複数の第2の位置情報に基づく第2の車両の第2の走行軌跡、および、走行車線情報に基づいて、第1の車両の走行する走行車線を推定する。
【選択図】図2
特許請求の範囲
【請求項1】
第1の車両に搭載され該第1の車両が走行する走行車線を推定する車線推定装置であって、
第1の車両の位置を示す第1の位置情報を取得する位置情報取得部と、
前記第1の車両と異なる車両と通信可能に構成される通信部と、
前記第1の車両の周辺を走行する第2の車両から、前記通信部を介して、前記第2の車両の走行車線を示す走行車線情報、および、第2の車両の位置を示す第2の位置情報を取得し、時系列で取得された複数の前記第1の位置情報に基づく前記第1の車両の走行軌跡である第1の走行軌跡、時系列で取得された複数の前記第2の位置情報に基づく前記第2の車両の走行軌跡である第2の走行軌跡、および、前記走行車線情報に基づいて、前記第1の車両の走行する走行車線を推定する制御部と
を備える車線推定装置。
続きを表示(約 560 文字)
【請求項2】
前記制御部は、前記第1の走行軌跡と、前記第2の走行軌跡との前記第1の車両の走行する方向に直交する方向のずれを認識することにより、前記第2の車両の前記走行車線に対する、前記第1の車両の前記走行車線の相対的位置を推定する、請求項1に記載の車線推定装置。
【請求項3】
前記制御部は、前記第1の車両の現在位置よりも後方に位置する前記第1の走行軌跡と前記第2の走行軌跡とを比較する、請求項1に記載の車線推定装置。
【請求項4】
前記第1の車両の走行方向の情報を取得する方向情報取得部をさらに備え、前記制御部は順次取得される第1の時点の前記第1の位置情報と第2の時点の前記第1の位置情報とから算出される前記第1の車両の走行方向と、前記第1の時点と前記第2の時点との間で前記方向情報取得部により取得される前記第1の車両の走行方向とに基づいて、前記第2の時点の前記第1の位置情報を棄却するか否かを判断する、請求項1に記載の車線推定装置。
【請求項5】
前記制御部は、前記通信部を介して、推定した前記第1の車両の前記走行車線の情報、および、前記第1の位置情報を、前記第1の車両の周辺を走行する第3の車両に送信するように構成される、請求項1に記載の車線推定装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車線推定装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
カメラにより撮像される画像を解析して、自車両の走行する車線および他の車線を認識する技術が提案されている。例えば、特許文献1に開示される走行車線検出装置は、カメラにより自車両の周辺の画像を撮像し、撮像した画像に基づいて他車両および自車両の走行する走行区画を認識する。そして、この走行車線検出装置は、他車両と自車両の走行する走行区画との位置関係から、自車両が走行する車線と異なる他の車線の有無を判定している。
【先行技術文献】
【特許文献】
【0003】
特開2005-301603号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来技術では、走行車線を認識するために高性能な車載カメラと、車載カメラから出力される画像を解析する高性能の画像処理能力が必要とされる。
【0005】
かかる事情に鑑みてなされた本開示の目的は、高度な画像処理を行うことなく、自車両が走行する走行車線を推定することができる車線推定装置を提供することにある。
【課題を解決するための手段】
【0006】
本開示の一実施形態に係る車線推定装置は、第1の車両に搭載され該第1の車両が走行する走行車線を推定する車線推定装置であって、第1の車両の位置を示す第1の位置情報を取得する位置情報取得部と、前記第1の車両と異なる車両と通信可能に構成される通信部と、前記第1の車両の周辺を走行する第2の車両から、前記通信部を介して、前記第2の車両の走行車線を示す走行車線情報、および、第2の車両の位置を示す第2の位置情報 を取得し、時系列で取得された複数の前記第1の位置情報に基づく前記第1の車両の走行軌跡である第1の走行軌跡、時系列で取得された複数の前記第2の位置情報に基づく前記第2の車両の走行軌跡である第2の走行軌跡、および、前記走行車線情報に基づいて、前記第1の車両の走行する走行車線を推定する制御部とを備える。
【発明の効果】
【0007】
本開示によれば、高度な画像処理を行うことなく、自車両が走行する走行車線の位置を推定することができる。
【図面の簡単な説明】
【0008】
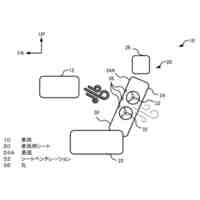
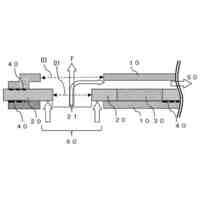
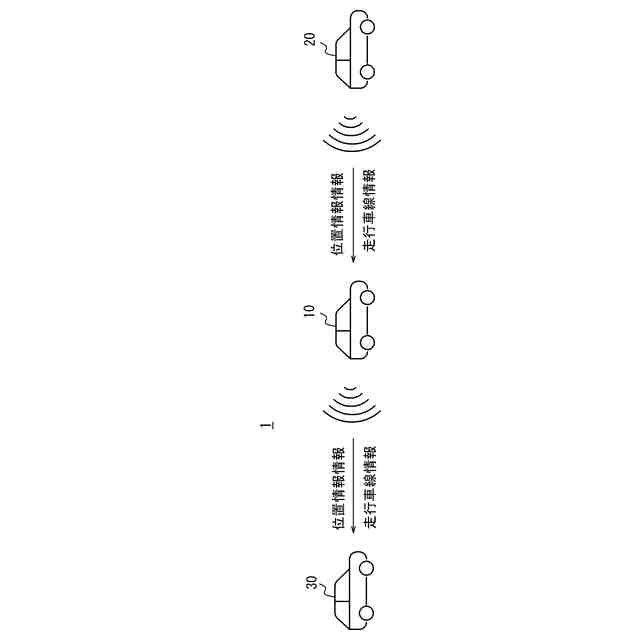
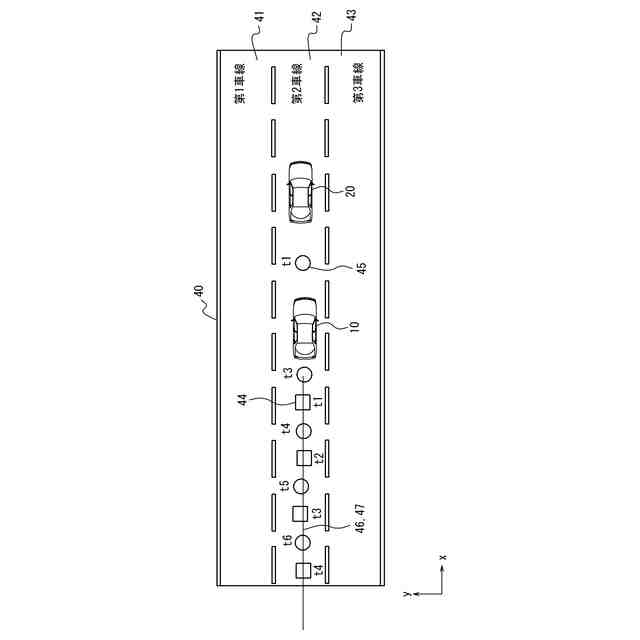
本開示の車線推定装置の動作の概略を説明する図である。
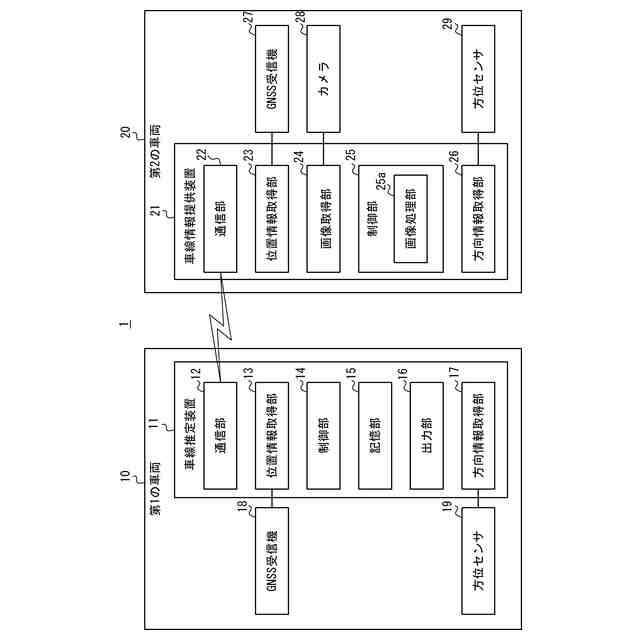
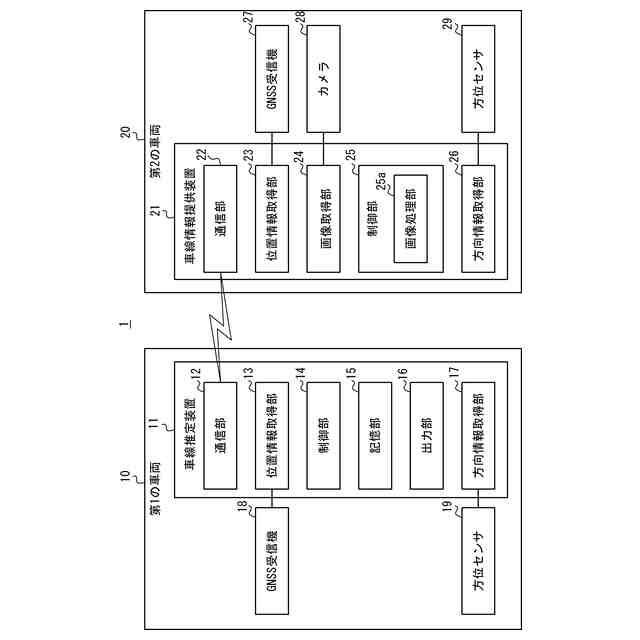
本開示の一実施形態に係る車線推定装置を含む車線推定システムの概略構成を示すブロック図である。
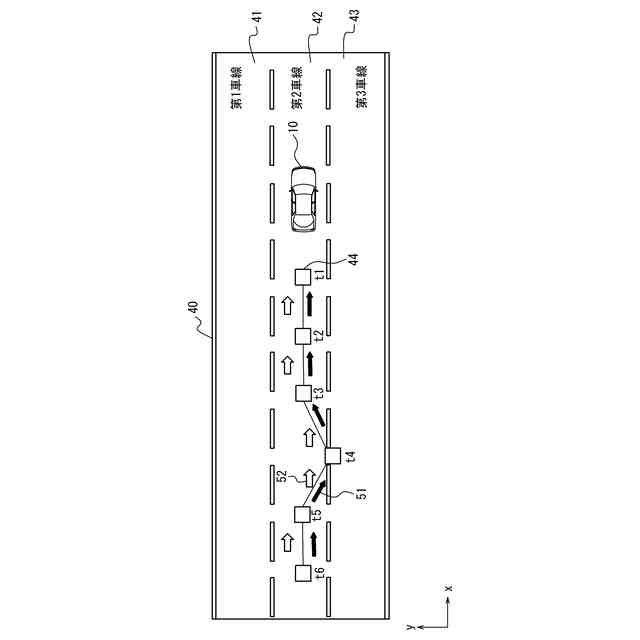
第2の車両が第1の車両の左隣の走行車線を走行する場合の走行軌跡の一例を示す図である。
第2の車両が第1の車両と同一の走行車線を走行する場合の走行軌跡の一例を示す図である。
第2の車両が第1の車両の右隣の走行車線を走行する場合の走行軌跡の一例を示す図である。
位置情報に生じる誤差によるずれを特定する方法を説明する図である。
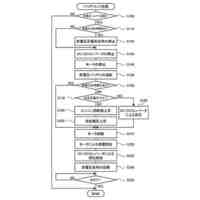
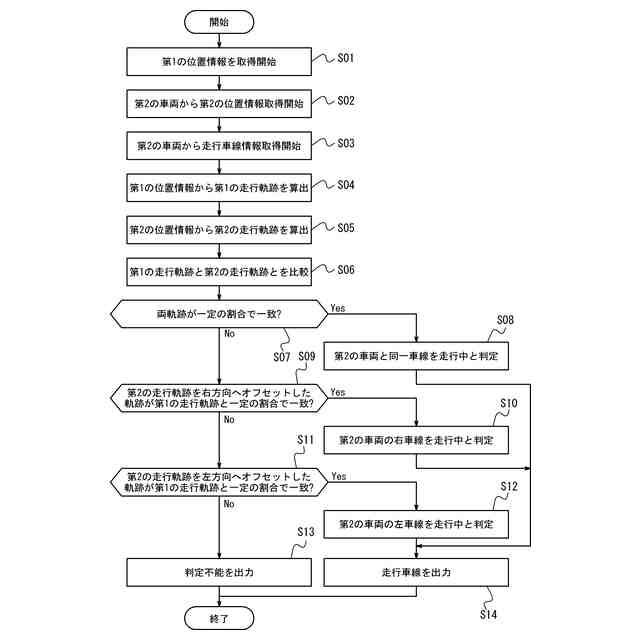
制御部が実行する車線推定処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本開示の一実施形態が、図面を参照して説明される。なお、以下の説明で用いられる図は模式的なものである。図面上の寸法及び比率等は現実のものとは必ずしも一致しない。
【0010】
(全体動作概要)
図1は、本開示の車線推定装置11(図2参照)を含む車線推定システム1の動作の概略を説明する図である。本開示における車両は、乗用車、トラック、バス、大型・小型特殊自動車等を含むが、これらに限られない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
18日前
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
電池
11日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
方法
23日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
車両
23日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
膜体
25日前
トヨタ自動車株式会社
車両
25日前
トヨタ自動車株式会社
モータ
3日前
トヨタ自動車株式会社
ロータ
12日前
トヨタ自動車株式会社
減圧弁
12日前
トヨタ自動車株式会社
モータ
18日前
トヨタ自動車株式会社
自動車
17日前
トヨタ自動車株式会社
モータ
4日前
トヨタ自動車株式会社
モータ
16日前
トヨタ自動車株式会社
ロータ
3日前
トヨタ自動車株式会社
電動車
12日前
トヨタ自動車株式会社
光電極
10日前
トヨタ自動車株式会社
電動車
12日前
トヨタ自動車株式会社
収容装置
3日前
トヨタ自動車株式会社
燃料電池
4日前
トヨタ自動車株式会社
処理装置
4日前
トヨタ自動車株式会社
蓄電装置
22日前
トヨタ自動車株式会社
端末装置
3日前
トヨタ自動車株式会社
コネクタ
25日前
トヨタ自動車株式会社
コネクタ
12日前
トヨタ自動車株式会社
月面車両
3日前
トヨタ自動車株式会社
回転電機
8日前
トヨタ自動車株式会社
蓄電装置
11日前
トヨタ自動車株式会社
着磁装置
3日前
トヨタ自動車株式会社
蓄電装置
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ