TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025121284
公報種別
公開特許公報(A)
公開日
2025-08-19
出願番号
2024016641
出願日
2024-02-06
発明の名称
推定装置および推定方法
出願人
大成建設株式会社
,
株式会社演算工房
,
株式会社エイシング
代理人
弁理士法人磯野国際特許商標事務所
主分類
E21D
9/093 20060101AFI20250812BHJP(地中もしくは岩石の削孔;採鉱)
要約
【課題】力点の修正を速やかに行うことで目標座標に極力誤差なく到達させることができる。
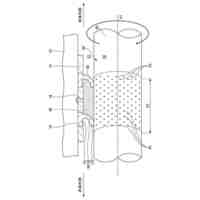
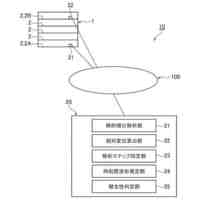
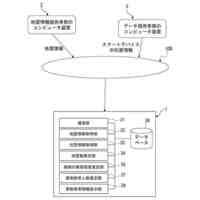
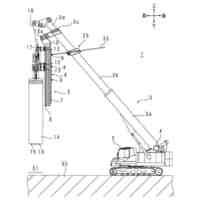
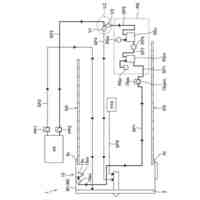
【解決手段】シールド掘進機10の進行に推奨される力点位置を推定する推定装置30であって、シールド掘進機10の複数の制御データ、および、リング終端での到達目標となるリング到達目標座標を取得する推定装置用データ取得部41と、前記リング到達目標座標までの進行において推奨される力点推奨位置を推定する力点推奨位置推定部44と、を備え、力点推奨位置推定部44は、掘進中において所定の時間間隔または所定の掘進長ごとに、残りの掘進長において到達目標座標へ到達させるための前記力点推奨位置を逐次推定する。
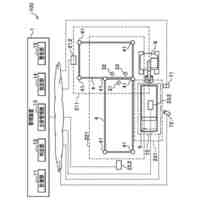
【選択図】図1
特許請求の範囲
【請求項1】
シールド掘進機の進行に推奨される力点位置を推定する推定装置であって、
前記シールド掘進機の複数の制御データ、および、リング終端での到達目標となるリング到達目標座標を取得する推定装置用データ取得部と、
前記リング到達目標座標までの進行において推奨される力点推奨位置を推定する力点推奨位置推定部と、を備え、
前記力点推奨位置推定部は、掘進中において所定の時間間隔または所定の掘進長ごとに、前記力点推奨位置を推定する、
ことを特徴とする推定装置。
続きを表示(約 1,400 文字)
【請求項2】
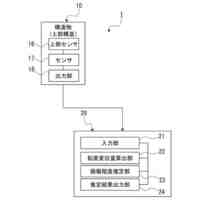
前記リング終端において到達が予測されるリング到達予測座標を推定する、または、現在位置での前記シールド掘進機の方向に基づいて設定される推論基準直線から前記リング到達予測座標までの到達予測偏差量を推定するリング到達予測座標推定部をさらに備え、
前記リング到達予測座標推定部は、掘進中において所定の時間間隔または所定の掘進長ごとに、前記リング到達予測座標を推定する、または、前記推論基準直線から前記リング到達予測座標までの前記到達予測偏差量を推定する、
ことを特徴とする請求項1に記載の推定装置。
【請求項3】
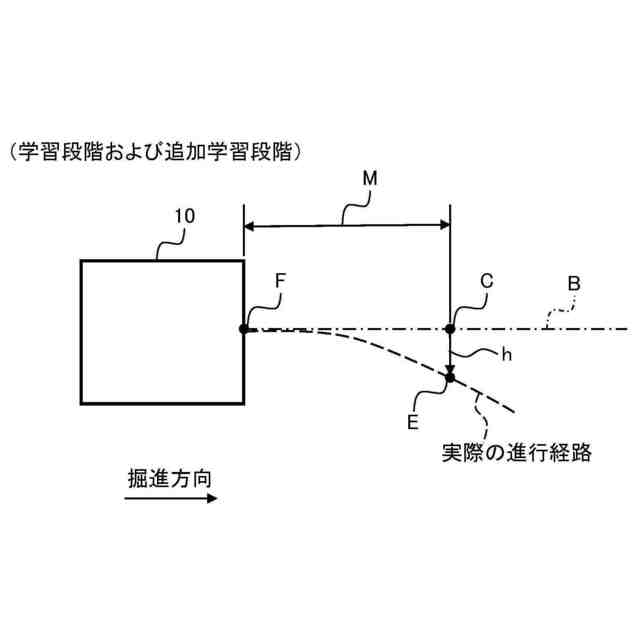
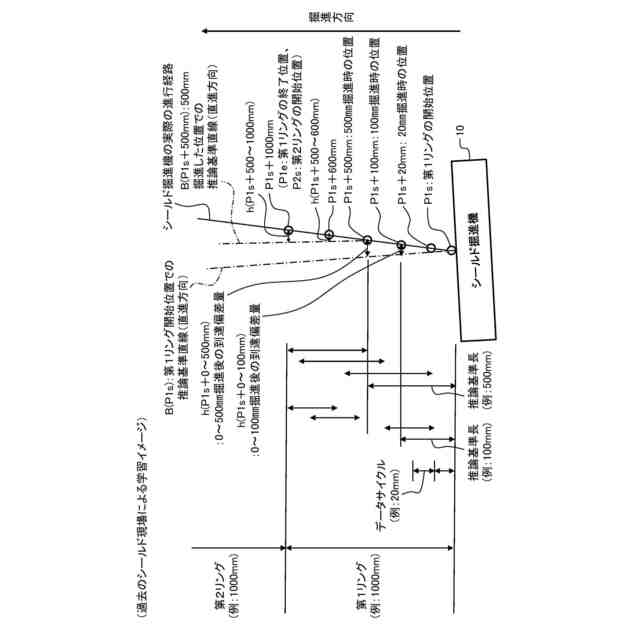
前記推論基準直線上でのシールド掘進機からの所定距離を示す推論基準長が基準として用いられ、
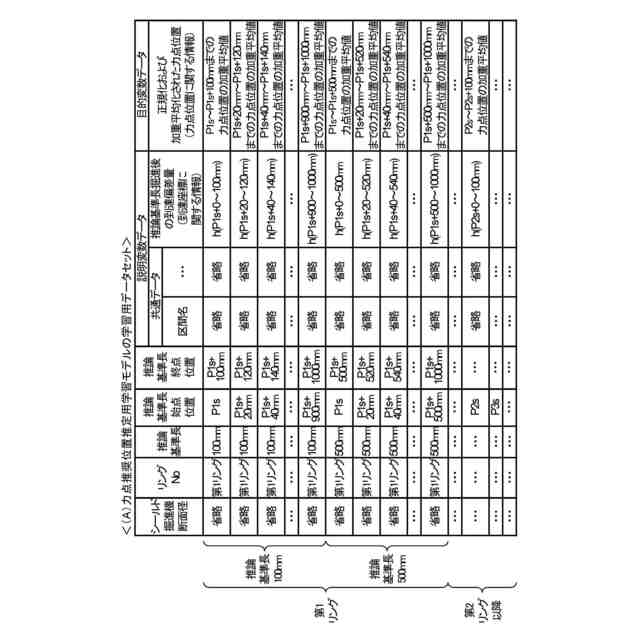
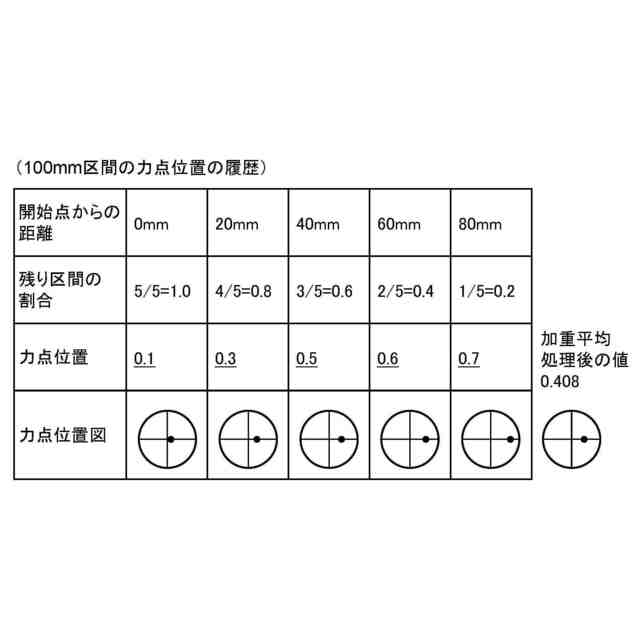
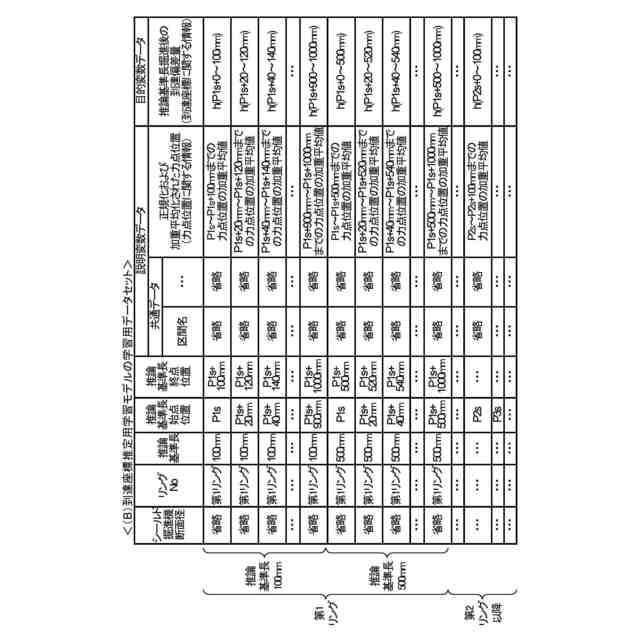
前記力点推奨位置推定部は、少なくとも、前記力点位置を除いた1以上の制御データ、および、現在位置から幾何的に求めた計画進行経路を推論基準長だけ進んだ後での基準長計画目標座標と推論基準長終点との計画偏差量を、力点推奨位置推定用学習モデルに入力することによって前記力点推奨位置を出力するものであり、
前記力点推奨位置推定用学習モデルは、シールド掘進機の過去の進行において取得したデータに基づいて作成されたモデルであり、前記力点位置を除いた1以上の制御データ、および、現在位置から推論基準長だけ進んだ後での実際の位置である基準長到達座標と推論基準長終点との到達偏差量を説明変数データとし、前記シールド掘進機が現在位置から推論基準長だけ進む間に実際に制御を行った力点位置を目的変数データとする学習データを用いて、学習することにより作成されたモデルであり、
前記リング到達予測座標推定部は、
少なくとも、前記力点位置を含む複数の制御データを到達座標推定用学習モデルに入力することによって、前記推論基準長だけ進んだ後で前記シールド掘進機の到達が予測される基準長到達予測座標と前記推論基準長終点との到達予測偏差量を出力する基準長到達予測座標推定部と、
前記到達予測偏差量に基づいて前記リング到達予測座標を求める、または、推論基準直線から前記リング到達予測座標までの到達予測偏差量を求めるリング到達予測座標出力部と、を有し、
前記到達座標推定用学習モデルは、シールド掘進機の過去の進行において取得したデータに基づいて作成されたモデルであり、前記シールド掘進機が現在位置から推論基準長だけ進む間に実際に制御を行った前記力点位置を含む複数の制御データを説明変数データとし、現在位置から推論基準長だけ進んだ後での実際の位置である基準長到達座標と推論基準長終点との到達偏差量を目的変数データとする学習データを用いて、学習することにより作成されたモデルである、
ことを特徴とする請求項2に記載の推定装置。
【請求項4】
シールド掘進機の進行に推奨される力点位置を推定する推定方法であって、
前記シールド掘進機の複数の制御データ、および、リング終端での到達目標となるリング到達目標座標を取得する推定装置用データ取得工程と、
前記リング到達目標座標までの進行において推奨される力点推奨位置を推定する力点推奨位置推定工程と、を有し、
前記力点推奨位置推定工程は、掘進中において所定の時間間隔または所定の掘進長ごとに実行される、
ことを特徴とする推定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、推定装置および推定方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
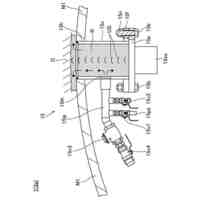
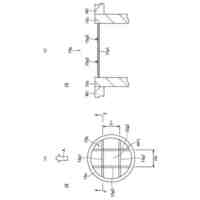
トンネルの施工方法としてシールド掘進機を用いるものがある。シールド掘進機は、計画された掘進指示書に従って掘進するように操作される。掘進指示書には、(1)各々のリングの掘削終了時における水平方向の方位(指示方位)または左右シールドジャッキストローク差、および、(2)鉛直方向の方位(指示ピッチング)または上下シールドジャッキストローク差が示されたトンネル掘進指示値が記載され、トンネル計画線にそって掘進するようにシールド掘進機が制御される。シールド掘進機は、後部に配置される複数のシールドジャッキを備えており、これらのシールドジャッキを制御することによって掘進方向が変更される。つまり、各々のシールドジャッキのON/OFFを選択することで(または、各々のシールドジャッキの圧力を制御することで)、シールド掘進機に作用する力点を変えて方向を制御する。例えば、すべてのシールドジャッキの推進力を均等にした場合、水平方向および鉛直方向に対して力点が中心になるので、理論上、シールド掘進機は直進する。
【0003】
従来、シールド掘進機の力点の位置を推定する推定装置が存在する(例えば、特許文献1参照)。この推定装置は、シールド掘進機の掘進の方向に関する方向データを取得する方向データ取得部と、少なくとも前記方向データを含むデータを推定モデルに入力することにより、前記シールド掘進機が掘進すべき力点の位置を推定する力点位置推定部を備える。前記推定モデルは、前記方向データに対応するデータを含む入力データに前記シールド掘進機が掘進すべき力点の位置が対応づけられた学習データを用いて機械学習を実行することにより作成されたモデルである。
【先行技術文献】
【特許文献】
【0004】
特開2019-143385号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、シールド掘進機の構造(一例は、シールドジャッキの油圧制御弁の装備の有無)によっては、設定可能な力点の位置が制約されるため、実際の力点と推奨される力点とにずれが生じる場合がある。推奨力点に力点を一致させることができない場合には、シールド掘進機を目標座標に到達させることが難しくなる。
また、シールド掘進機の癖(真っ直ぐに掘進しても、左に曲がる癖等)、重心、不均一な地盤条件、余堀量などの様々な要因で、推奨力点に力点を設定して掘進しても、目標座標に到達することができない場合もある。
【0006】
これらの場合、目標座標に対する到達座標のずれを認識するのが目標座標に近づいてからになるので、シールド掘進機の進行が安定したものではなく、その後の軌道修正が難しい場合もある。
【0007】
このような観点から、本発明は、力点の修正を速やかに行うことで目標座標に極力誤差なく到達させることができる、推定装置および推定方法を提供する。
【課題を解決するための手段】
【0008】
本発明に係る推定装置は、シールド掘進機の進行に推奨される力点位置を推定する装置である。この推定装置は、前記シールド掘進機の複数の制御データ、および、リング終端での到達目標となるリング到達目標座標を取得する推定装置用データ取得部と、前記リング到達目標座標までの進行において推奨される力点推奨位置を推定する力点推奨位置推定部とを備える。前記力点推奨位置推定部は、掘進中において所定の時間間隔または所定の掘進長ごとに、前記力点推奨位置を推定する。
【0009】
本発明に係る推定装置においては、力点の修正を速やかに行うことで目標座標に極力誤差なく到達させることができる。
【0010】
前記リング終端において到達が予測されるリング到達予測座標を推定する、または、現在位置での前記シールド掘進機の方向に基づいて設定される推論基準直線から前記リング到達予測座標までの到達予測偏差量を推定するリング到達予測座標推定部をさらに備えてもよい。前記リング到達予測座標推定部は、掘進中において所定の時間間隔または所定の掘進長ごとに、前記リング到達予測座標を推定する、または、前記推論基準直線から前記リング到達予測座標までの前記到達予測偏差量を推定する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
大成建設株式会社
新設構造物
14日前
大成建設株式会社
シール機構
29日前
大成建設株式会社
廃棄物ならし装置
1か月前
大成建設株式会社
建物設計支援プログラム
1か月前
大成建設株式会社
推定装置および推定方法
10日前
大成建設株式会社
推定装置および推定方法
10日前
大成建設株式会社
建物の健全性評価システム
22日前
大成建設株式会社
炭酸カルシウムの製造方法
17日前
大成建設株式会社
建築物風騒音の簡易評価方法
1か月前
大成建設株式会社
基礎杭の損傷程度推定システム
1か月前
大成建設株式会社
地震時要救助者位置推定システム
24日前
大成建設株式会社
試料採取装置および特性評価方法
7日前
大成建設株式会社
切羽観察システム及び切羽観察方法
1か月前
大成建設株式会社
パッカー装置および湧水圧測定方法
1か月前
大成建設株式会社
汚泥処理方法および汚泥処理システム
今日
地中空間開発株式会社
トンネル掘削機
10日前
大成建設株式会社
静的コーン試験装置と静的コーン試験方法
17日前
大成建設株式会社
シールド工事用充填材、及びシールド工法
22日前
大成建設株式会社
粒状体撒き出し装置および地盤模型作製方法
1か月前
大成建設株式会社
ランドマーク、位置推定方法、およびプログラム
21日前
大成建設株式会社
コンクリート組成物、及び、コンクリート部材の製造方法
4日前
大成建設株式会社
土量計測システム、土量計測方法、初期化方法及び保護構造
28日前
大成建設株式会社
切替バルブ、コンクリート打設装置および覆工コンクリート打設方法
1か月前
大成建設株式会社
トンネルの拡幅施工における設計荷重の評価方法とトンネルの拡幅施工方法
25日前
大成建設株式会社
建物状態記録システム、及び建物状態記録システムを用いた工事進捗管理システム
29日前
大成建設株式会社
学習装置、学習方法、推定装置、推定方法、推定プログラム、および推定システム
1日前
大成建設株式会社
耐震補強構造体設置用架台、耐震補強構造体設置装置および耐震補強構造体設置方法
25日前
大成建設株式会社
洗浄用セグメントリングと、テールクリアランスにおけるテールシール間の洗浄方法
10日前
大成建設株式会社
生分解評価ケース、及び生分解評価ケースを用いた生分解性樹脂成形物の生分解評価方法
1か月前
大成建設株式会社
トンネル切羽評価支援装置、トンネル切羽評価支援プログラム、及びトンネル切羽評価支援方法
1日前
大成建設株式会社
嫌気性捕食細菌集積系の製造方法、この製造方法により製造された嫌気性捕食細菌集積系、製造された嫌気性捕食細菌集積系を用いる汚泥処理方法
今日
個人
掘削機
2か月前
株式会社奥村組
地山探査方法
9日前
株式会社奥村組
地山探査装置
9日前
株式会社奥村組
地山探査装置
9日前
株式会社奥村組
地山探査装置
9日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ