TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025124382
公報種別
公開特許公報(A)
公開日
2025-08-26
出願番号
2024020388
出願日
2024-02-14
発明の名称
異常姿勢検知装置
出願人
いすゞ自動車株式会社
代理人
弁理士法人鷲田国際特許事務所
主分類
G08B
21/02 20060101AFI20250819BHJP(信号)
要約
【課題】骨格データの機械学習を必要とせずに、異常姿勢を検知することができる異常姿勢検知装置を提供すること。
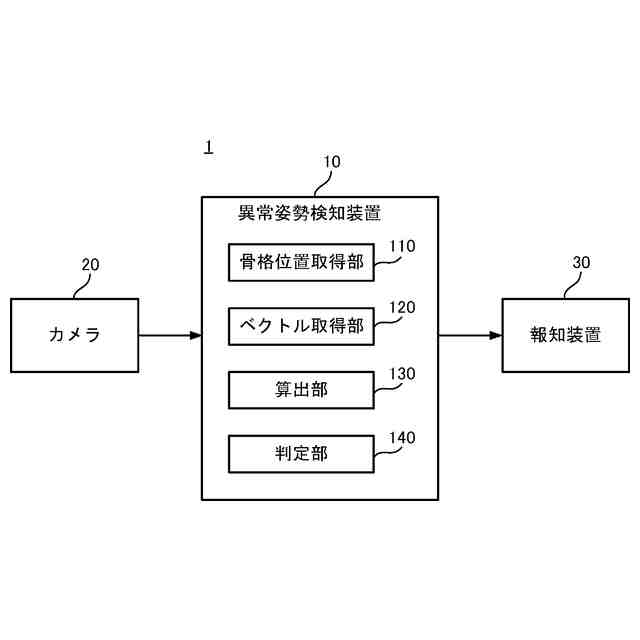
【解決手段】異常姿勢検知装置は、人物の3次元骨格位置を取得する骨格位置取得部と、3次元骨格位置に基づいて、人物がいる床面に対する垂直ベクトルと、人物の右足の向きを示す右足ベクトルと、人物の左足の向きを示す左足ベクトルとを取得するベクトル取得部と、垂直ベクトルと右足ベクトルとのなす右足角度と、垂直ベクトルと左足ベクトルとのなす左足角度とを算出する算出部と、右足角度および左足角度の両方が予め設定された規定角度未満である場合、人物の異常姿勢有りと判定し、その旨の報知を行うように、所定の報知装置を制御する判定部と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
人物の3次元骨格位置を取得する骨格位置取得部と、
前記3次元骨格位置に基づいて、前記人物がいる床面に対して垂直である垂直ベクトルと、前記人物の右足の向きを示す右足ベクトルと、前記人物の左足の向きを示す左足ベクトルとを取得するベクトル取得部と、
前記垂直ベクトルと前記右足ベクトルとのなす右足角度と、前記垂直ベクトルと前記左足ベクトルとのなす左足角度とを算出する算出部と、
前記右足角度および前記左足角度の両方が予め設定された規定角度未満である場合、前記人物の異常姿勢有りと判定し、その旨の報知を行うように、所定の報知装置を制御する判定部と、を有する、
異常姿勢検知装置。
続きを表示(約 790 文字)
【請求項2】
前記異常姿勢は、転倒であり、
前記3次元骨格位置は、前記人物の下半身における上方の3次元骨格位置と下方の3次元骨格位置とを含み、
前記上方の3次元骨格位置は、右足付け根および左足付け根、または、骨盤中心であり、
前記下方の3次元骨格位置は、右足首以下の部分および左足首以下の部分であり、
前記右足ベクトルは、前記右足付け根または前記骨盤中心のいずれかから前記右足首以下の部分へ向かうベクトルであり、
前記左足ベクトルは、前記左足付け根または前記骨盤中心のいずれかから前記左足首以下の部分へ向かうベクトルである、
請求項1に記載の異常姿勢検知装置。
【請求項3】
前記3次元骨格位置は、前記人物の頭の3次元骨格位置をさらに含み、
前記算出部は、前記頭の3次元骨格位置に基づいて、前記人物の頭と前記床面との間の距離をさらに測定し、
前記判定部は、前記右足角度および前記左足角度の両方が予め設定された規定角度未満である場合に加えて、前記距離が予め設定された規定距離未満である場合に、前記人物の異常姿勢有りと判定する、
請求項1または2に記載の異常姿勢検知装置。
【請求項4】
前記3次元骨格位置は、前記人物を側方から見たときの着地している足位置である着地位置と、人体の重心位置をさらに含み、
前記算出部は、前記着地位置と、前記人体の重心位置とに基づいて、前記着地位置と前記人体の重心位置との間の距離をさらに測定し、
前記判定部は、前記右足角度および前記左足角度の両方が予め設定された規定角度未満である場合に加えて、前記距離が予め設定された規定距離以上である場合に、前記人物の異常姿勢有りと判定する、
請求項1または2に記載の異常姿勢検知装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、異常姿勢検知装置に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来、人物の骨格データに基づいて、その人物の姿勢を検知する技術が知られている。例えば、特許文献1には、予め異常姿勢を示すラベルが付与された骨格データを機械学習させ、それにより得られた学習モデルを用いて人物の異常姿勢を検知する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-55077号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術では、人手により骨格データにラベルを付与する作業が必要となるため、手間が生じる。また、骨格データの元となる姿勢データを撮影により用意する場合には、実際に人間が異常姿勢をとる必要があり、危険が伴う。
【0005】
本開示の一態様の目的は、骨格データの機械学習を必要とせずに、異常姿勢を検知することができる異常姿勢検知装置を提供することである。
【課題を解決するための手段】
【0006】
本開示の一態様に係る異常姿勢検知装置は、人物の3次元骨格位置を取得する骨格位置取得部と、前記3次元骨格位置に基づいて、前記人物がいる床面に対して垂直である垂直ベクトルと、前記人物の右足の向きを示す右足ベクトルと、前記人物の左足の向きを示す左足ベクトルとを取得するベクトル取得部と、前記垂直ベクトルと前記右足ベクトルとのなす右足角度と、前記垂直ベクトルと前記左足ベクトルとのなす左足角度とを算出する算出部と、前記右足角度および前記左足角度の両方が予め設定された規定角度未満である場合、前記人物の異常姿勢有りと判定し、その旨の報知を行うように、所定の報知装置を制御する判定部と、を有する。
【発明の効果】
【0007】
本開示によれば、骨格データの機械学習を必要とせずに、異常姿勢を検知することができる。
【図面の簡単な説明】
【0008】
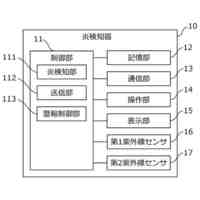
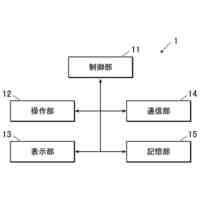
本開示の実施の形態に係る異常姿勢検知システムの構成を示すブロック図
本開示の実施の形態に係る3次元骨格位置の一例を示す図
本開示の実施の形態に係る垂直ベクトル、右足ベクトル、および左足ベクトルの一例を示す図
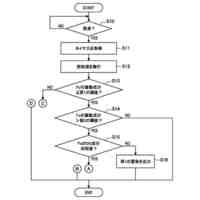
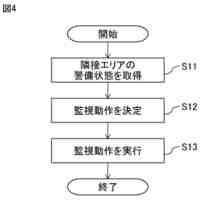
本開示の実施の形態に係る異常姿勢検知装置の動作を示すフローチャート
【発明を実施するための形態】
【0009】
以下、本開示の実施の形態について、図面を参照しながら説明する。
【0010】
まず、本実施の形態に係る異常姿勢検知システム1の構成について、図1を用いて説明する。図1は、異常姿勢検知システム1の構成を示すブロック図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
エムケー精工株式会社
車両誘導装置
4日前
株式会社国際電気
防災システム
1日前
トヨタ自動車株式会社
方法
1日前
愛知製鋼株式会社
マーカシステム及び制御方法
3日前
能美防災株式会社
炎検知器
3日前
トヨタ自動車株式会社
路側装置
1日前
トヨタ自動車株式会社
路側装置
1日前
株式会社SUBARU
判定装置
1日前
能美防災株式会社
ガス検出装置
3日前
トヨタ自動車株式会社
情報処理装置
1日前
セコム株式会社
巡回警備ロボット
2日前
セコム株式会社
警備システム及び警備装置
2日前
株式会社本間組
船舶運航管理システム
3日前
日産自動車株式会社
配車管理装置及び配車管理方法
2日前
日産自動車株式会社
配車管理装置及び配車管理方法
2日前
いすゞ自動車株式会社
荷室管理システム
3日前
いすゞ自動車株式会社
異常姿勢検知装置
4日前
株式会社リコー
情報処理装置、情報処理方法、及びプログラム
2日前
トヨタ自動車株式会社
情報処理装置、システム、及びシステムの動作方法
1日前
アルプスアルパイン株式会社
振り出し予測システム及び振り出し事故予防システム
1日前
コニカミノルタ株式会社
デバイス、端末管理システム及びプログラム
3日前
パイオニア株式会社
状況出力装置
2日前
トヨタ自動車株式会社
運転支援装置
2日前
パイオニア株式会社
リスク情報出力装置
2日前
三菱重工機械システム株式会社
合流支援システム、合流支援方法およびプログラム
2日前
三菱重工機械システム株式会社
合流支援システム、合流支援方法、およびプログラム
3日前
三菱重工機械システム株式会社
合流支援システム、合流支援方法、およびプログラム
3日前
パナソニックIPマネジメント株式会社
情報処理方法、情報処理装置及び情報処理プログラム
1日前
日本電気株式会社
情報提供サーバ、情報提供方法及びプログラム記録媒体
2日前
三菱重工機械システム株式会社
情報処理装置、制御装置、制御システム、情報処理方法、及びプログラム
3日前
三菱重工機械システム株式会社
情報処理装置、制御装置、制御システム、情報処理方法、及びプログラム
3日前
パイオニア株式会社
情報処理装置及び情報処理方法
2日前
データバイザー株式会社
トレーラ又はトラクタの情報提示方法、トレーラ又はトラクタの情報提示装置、及びトレーラ又はトラクタの情報提示プログラム
1日前
パイオニア株式会社
情報処理システム、移動体端末、情報処理方法、情報処理プログラム及び記録媒体
4日前
他の特許を見る





 特許ウォッチ
特許ウォッチ