TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025127328
公報種別
公開特許公報(A)
公開日
2025-09-01
出願番号
2024024004
出願日
2024-02-20
発明の名称
ロボットの制御方法及びロボット制御装置
出願人
ニデックインスツルメンツ株式会社
代理人
個人
,
個人
主分類
B25J
9/10 20060101AFI20250825BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットを制御するときにロボットの速度に起因した共振を起こすことなく加速度やモータトルクを制限できるようにする。
【解決手段】ロボットが始点から動き出して加速しそののち減速して終点において停止するようにロボットを制御するときに、始点及び終点の位置と、ロボットに許容される速度及び加速度とに基づいて、始点から終点へロボットを移動させる通常動作用の速度計画を作成し、さらに、許容される速度の範囲内で、通常動作用の速度計画での加速度を加速度の制限値によって制限して始点から終点までロボットを移動させる加速度制限動作用の速度計画を作成する。加速度やモータトルクの制限を行うときに加速度制限動作用の速度計画を使用する。
【選択図】図2
特許請求の範囲
【請求項1】
ロボットが始点から動き出して加速しそののち減速して終点において停止するように前記ロボットを制御する制御方法であって、
前記始点及び前記終点の位置と、前記ロボットに許容される速度及び加速度とに基づいて、前記始点から前記終点へ前記ロボットを移動させる通常動作用の速度計画を作成する第1の作成工程と、
前記許容される速度の範囲内で、前記通常動作用の速度計画における加速度を加速度の制限値によって制限して前記始点から前記終点まで前記ロボットを移動させる加速度制限動作用の速度計画を作成する第2の作成工程と、
を有する制御方法。
続きを表示(約 1,800 文字)
【請求項2】
前記加速度の制限値の入力のないときに前記通常動作用の速度計画に基づいて前記ロボットを移動させ、
前記加速度の制限値の入力のあるときに前記加速度制限動作用の速度計画に基づいて前記ロボットを移動させる、請求項1に記載の制御方法。
【請求項3】
前記通常動作用の速度計画における加速時間及び減速時間を維持しつつ前記通常動作用の速度計画での速度が速度の制限値によって制限された速度計画であって、前記始点から前記終点まで前記ロボットを移動させる速度制限動作用の速度計画を作成する第3の作成工程をさらに有する、請求項1または2に記載の制御方法。
【請求項4】
前記加速度の制限値は、前記通常動作用の速度計画における加速度に対する比として表され、前記速度の制限値は、前記通常動作用の速度計画における速度に対する比として表され、
前記加速度の制限値の比を前記速度の制限値とみなして前記第3の作成工程を実施し、得られた前記速度制限動作用の速度計画での等速区間の速度が前記ロボットの共振速度範囲内にないときは前記速度制限動作用の速度計画に基づいて前記ロボットを移動させ、前記速度制限動作用の速度計画での前記等速区間の速度が前記ロボットの共振速度範囲内にあるときには前記第2の作成工程を実施して得られた前記加速度制限動作用の速度計画に基づいて前記ロボットを移動させる、請求項3に記載の制御方法。
【請求項5】
前記ロボットは複数の軸を有し、前記通常動作用の速度計画は、前記始点から前記終点までポイント・ツー・ポイント動作によって前記ロボットを移動させる速度計画である、請求項1または2に記載の制御方法。
【請求項6】
ロボットが始点から動き出して加速しそののち減速して終点において停止するように前記ロボットを制御するロボット制御装置であって、
前記始点及び前記終点の位置と、前記ロボットに許容される速度及び加速度とに基づいて、前記始点から前記終点へ前記ロボットを移動させる通常動作用の速度計画を作成し、
加速度の制限値の入力のあるときに、前記許容される速度の範囲内で、前記通常動作用の速度計画における加速度を前記加速度の制限値によって制限して前記始点から前記終点まで前記ロボットを移動させる加速度制限動作用の速度計画を作成する、ロボット制御装置。
【請求項7】
前記加速度の制限値の入力のないときには前記通常動作用の速度計画に基づいて前記ロボットが移動するように前記ロボットを制御し、前記加速度の制限値の入力のあるときには前記加速度制限動作用の速度計画に基づいて前記ロボットが移動するように前記ロボットを制御する、請求項6に記載のロボット制御装置。
【請求項8】
前記通常動作用の速度計画における加速時間及び減速時間を維持しつつ前記通常動作用の速度計画での速度が速度の制限値によって制限された速度計画であって、前記始点から前記終点まで前記ロボットを移動させる速度制限動作用の速度計画を作成する、請求項6または7に記載のロボット制御装置。
【請求項9】
前記加速度の制限値は、前記通常動作用の速度計画における加速度に対する比として表され、前記速度の制限値は、前記通常動作用の速度計画における速度に対する比として表され、
前記加速度の制限値の比を前記速度の制限値とみなして前記速度制限動作用の速度計画を作成し、
前記速度制限動作用の速度計画での等速区間の速度が前記ロボットの共振速度範囲内にないときは前記速度制限動作用の速度計画に基づいて前記ロボットが移動するように前記ロボットを制御し、前記速度制限動作用の速度計画での前記等速区間の速度が前記ロボットの共振速度範囲内にあるときには前記加速度制限動作用の速度計画に基づいて前記ロボットが移動するように前記ロボットを制御する、請求項8に記載のロボット制御装置。
【請求項10】
前記ロボットは複数の軸を有し、
前記始点から前記終点までポイント・ツー・ポイント動作によって前記ロボットが移動するように前記通常動作用の速度計画を作成する、請求項6または7に記載のロボット制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用ロボット(以下、単に「ロボット」と呼ぶ)の動作を制御する制御方法と、そのような制御方法を実施するロボット制御装置とに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
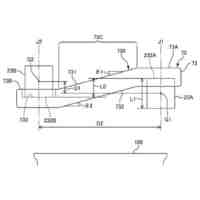
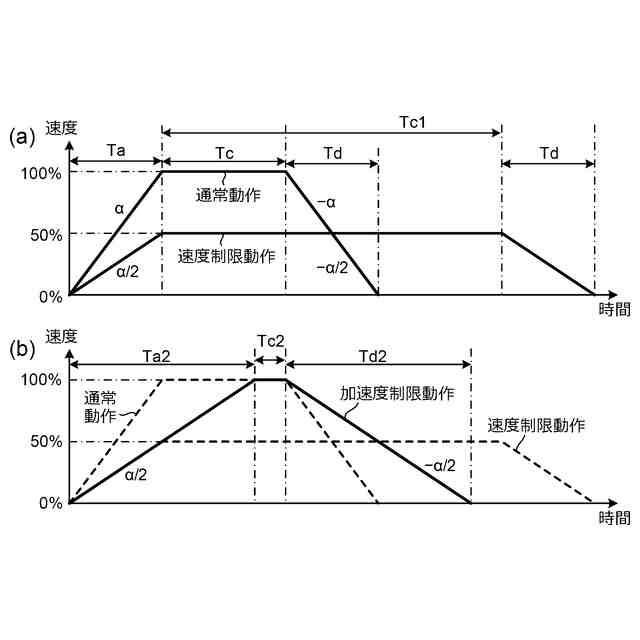
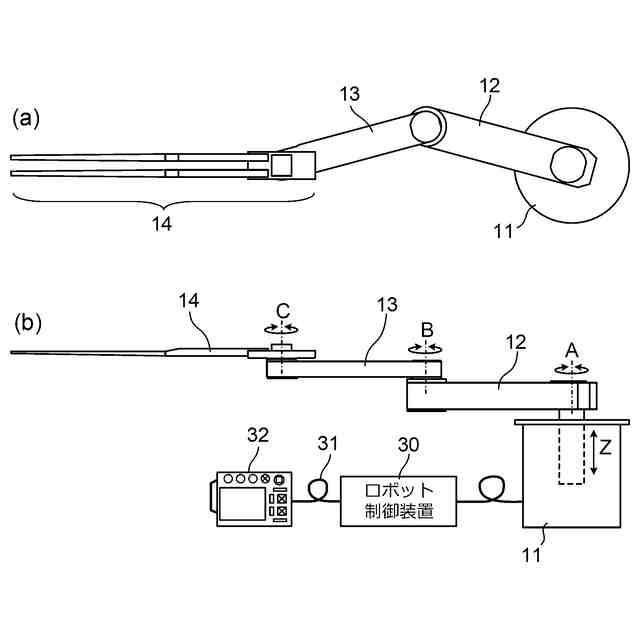
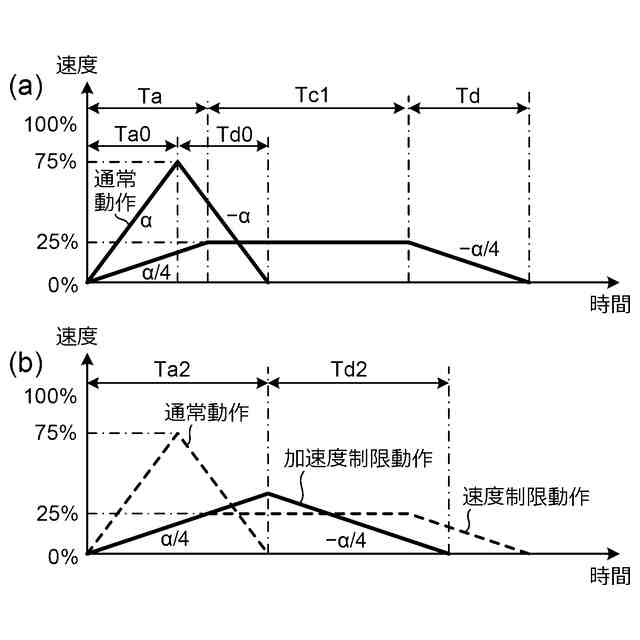
ワークの搬送や加工に用いられるロボットは、一般に、基台に対して複数のアーム(リンクとも呼ぶ)が直列に連結されてその先端にハンドなどのエンドエフェクタを備えた構成を有し、指定した位置にそのエンドエフェクタを移動させるように制御される。エンドエフェクタの目標位置を指定してロボットを動作させるときには、できるだけ短時間に目標位置に到達できることが好ましい。できるだけ短時間に目標位置に到達するために、ロロボットの各軸に関し、始点から動き出して一定の加速度で加速し、ある速度に達したらそのときの速度を維持し、その後、一定の加速度で減速して終点で停止するような制御が行われる。加速及び減速が行われる区間をそれぞれ加速区間及び減速区間と呼び、加速区間及び減速区間の時間長さをそれぞれ加速時間及び減速時間と呼ぶ。加速終了後、減速を開始するまでの速度が一定に維持される区間を等速区間とされる。この場合、時間を横軸とし、速度を縦軸とするグラフすなわち速度グラフを描けば台形となり、この台形の面積が移動距離に対応する。等速区間において速度は最高値となるが、この最高値は、ロボットの機構やモータの定格などによって規定される定格最高速度の範囲内において、与えられた始点から終点までの移動において可能な最高の速度(この速度を運用最高速度と呼ぶ)とされる。始点と終点とが十分には離れていないときは、等速区間を挟まずに加速中に減速に切り替わることがある。等速区間を挟まない場合には、速度グラフを描けば三角形となり、この三角形の面積が移動距離に相当する。通常、加速に用いる加速度の絶対値と減速に用いる加速度の絶対値とが等しくなるようにこれらの加速度は設定される。
【0003】
上述したようにロボットは、複数のアームを直列に連結してその一端が基台に接続されているという構造を有するので、ロボットの動作に伴ってロボットでは共振が発生することがある。共振は、ロボットが特定の速度すなわち共振速度にあるときに発生しやすい。加速及び減速に伴ってロボットの速度が共振速度を横切ることは許されるが、等速区間にあるときのロボットの速度が共振速度と一致したりそれに近い値となると、ロボットが大きく振動することになるので好ましくない。ロボットはできるだけ速く動かすこととして速度や加速度の意図的な制限を行わないときのロボットの動作を通常動作と呼ぶこととすると、ロボットは、通常動作での等速区間での最高速度すなわち運用最高速度が共振速度やその近傍の速度には一致しないようにあらかじめ調整される。
【0004】
ロボットにおける共振の発生を防ぐ技術として、特許文献1は、ロボットの制御に際して加速時間を算出し、算出された加速時間が所定の時間範囲内にあるときに加速時間がその時間範囲の上限値(最大時間)となるように加速度を小さくすることを開示している。特許文献2は、片持ち梁状に物体を支持して搬送するロボットにおいて物体を直線移動させるときに、直線移動におけるジャーク(加加速度)時間と等加速度時間との和が共振周期の自然数倍となるように制御を行うことを開示している。
【先行技術文献】
【特許文献】
【0005】
特開2003-260636号公報
特開2003-21555号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
教示などのためにロボットを低速で動作させるときは、通常動作時と同じ加速時間及び減速時間を使用して、等速区間での速度を通常動作時に比べて所望の値に制限するのが一般的である。このような動作を速度制限動作と呼ぶことにする。加速時間及び減速時間を変化させずに等速区間での速度が制限されるので、加速時及び減速時の加速度も通常動作時よりも小さくなり、発生するモータトルクも通常動作時よりも小さくなる。したがって、ロボットにおいて何らかの事情で通常動作時よりも加速度やモータトルクを制限したい場合にも、速度制限動作を実施すればよい。しかしながら、加速度やモータトルクの制限のためにこのように速度制限動作を実施した場合、等速区間での制限後の速度が共振速度に一致したり近づいたりしてロボットが共振することがある。この共振は、特許文献1,2に記載された技術によっては防ぐことがでない。なぜならば、特許文献1,2の技術はロボットを加速している期間に生ずる振動がロボットの機構上の固有振動と共鳴しないようにする技術であるのに対し、ロボットが特定の速度で動作しているときの共振は、各軸のモータの振動やモータに接続する減速機の角度伝達誤差に基づく振動によるものであって、ロボットの加速とは関係なく生ずるものであるからである。加速度やモータトルクを制限するためにロボットの速度を低下させたときに共振が起こることを防ぐためには、ロボットの速度をさらに低下させる必要があり、その結果、所望の加速度やモータトルクを達成できなくなる。
【0007】
本発明の目的は、ロボットを制御するときにロボットの速度に起因した共振を起こすことなく加速度やモータトルクを制限することができる制御方法と、そのような制御を実現するロボット制御装置とを提供することにある。
【課題を解決するための手段】
【0008】
本発明の一態様によれば、ロボットが始点から動き出して加速しそののち減速して終点において停止するようにロボットを制御する制御方法は、始点及び終点の位置と、ロボットに許容される速度及び加速度とに基づいて、始点から終点へロボットを移動させる通常動作用の速度計画を作成する第1の作成工程と、許容される速度の範囲内で、通常動作用の速度計画における加速度を加速度の制限値によって制限して始点から終点までロボットを移動させる加速度制限動作用の速度計画を作成する第2の作成工程と、を有する。
【0009】
本発明の一態様によれば、ロボットが始点から動き出して加速しそののち減速して終点において停止するようにロボットを制御するロボット制御装置は、始点及び終点の位置と、ロボットに許容される速度及び加速度とに基づいて、始点から終点へロボットを移動させる通常動作用の速度計画を作成し、加速度の制限値が入力したときに、許容される速度の範囲内で、通常動作用の速度計画における加速度を加速度の制限値によって制限して始点から終点までロボットを移動させる加速度制限動作用の速度計画を作成する。
【発明の効果】
【0010】
本発明の一態様によれば、ロボットを制御するときにロボットの速度に起因した共振を起こすことなく加速度やモータトルクを制限することができるようになる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
23日前
個人
折りたたみ工具
6日前
株式会社三協システム
製函機
4日前
CKD株式会社
把持装置
5日前
株式会社三協システム
移載装置
3日前
株式会社不二越
ロボットシステム
17日前
株式会社不二越
ロボット操作装置
11日前
SMC株式会社
着脱装置
4日前
太陽パーツ株式会社
アシストスーツ
6日前
日本精工株式会社
締結用工具
20日前
株式会社ミクロブ
把持装置
5日前
ARMA株式会社
ジョイントフレーム
18日前
トヨタ自動車株式会社
カプラ接続治具
27日前
株式会社不二越
ロボットシステム
3日前
株式会社不二越
ロボットシステム
6日前
トヨタ自動車株式会社
歩行ロボット
9日前
積水ハウス株式会社
フィルム除去具
1か月前
ダイハツ工業株式会社
移載治具
18日前
大和ハウス工業株式会社
ねじ回転工具
4日前
株式会社不二越
協働ロボットシステム
1か月前
株式会社清水製作所
電動工具の吊下げ具
1か月前
株式会社不二越
ロボットシステム
1か月前
シヤチハタ株式会社
マーキング装置
9日前
セイコーエプソン株式会社
ロボット
23日前
セイコーエプソン株式会社
ロボット
17日前
セイコーエプソン株式会社
ロボット
13日前
セイコーエプソン株式会社
ロボット
4日前
コネクテッドロボティクス株式会社
保持システム
1か月前
シヤチハタ株式会社
マーキング装置
9日前
広島県
把持固定機構、及び把持固定ロボットハンド
9日前
セコム株式会社
ロボット
17日前
北越メタル株式会社
鉄筋保持具
1か月前
株式会社マキタ
打撃工具
1か月前
川崎重工業株式会社
作業設備
1か月前
タイガー産業株式会社
アタッチメント
1か月前
株式会社マキタ
打撃工具
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ