TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025127886
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2024024874
出願日
2024-02-21
発明の名称
作動システム
出願人
日鉄テックスエンジ株式会社
代理人
弁理士法人朝日奈特許事務所
主分類
B25J
9/22 20060101AFI20250826BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作動体がユーザからの任意の操作によって想定外の軌跡で動作する可能性があっても、作動体の動作を適切に制御する作動システムの提供。
【解決手段】ユーザによる操作装置からの入力操作に応じて所定の動作を行う作動体の動作をシミュレートするために、仮想空間において、作動体に対応する仮想作動体と、仮想作動体の移動を規制するために仮想的に設けられる仮想規制部との間の位置関係をシミュレートするシミュレート部と、シミュレートされた位置関係に応じて、作動体の動作を制御する動作制御部とを備え、シミュレート部は、仮想作動体と仮想規制部との距離が所定の範囲内であると判定した場合、入力操作に対応する仮想作動体の移動方向を仮想規制部の形状に基づいて補正するように構成されている。
【選択図】図6
特許請求の範囲
【請求項1】
ユーザによる操作装置からの入力操作に応じて所定の動作を行う作動体の動作をシミュレートするために、仮想空間において、前記作動体に対応する仮想作動体と、前記仮想作動体の移動を規制するために仮想的に設けられる第1の仮想規制部との間の位置関係をシミュレートするシミュレート部と、
前記シミュレート部によりシミュレートされた位置関係に応じて、前記作動体の動作を制御する動作制御部と
を備えた作動システムであって、
前記シミュレート部は、前記作動体への入力操作がなされた際に、前記入力操作に並行して、前記仮想空間において、前記入力操作に対応する内容で前記仮想作動体を動作させて、前記仮想作動体と前記第1の仮想規制部との間の位置関係を所定の時間間隔で判定し、
前記動作制御部は、前記シミュレート部による判定の結果に基づいて、前記入力操作に基づく動作指令に並行して前記作動体を動作させるように構成され、
前記シミュレート部は、前記仮想作動体と前記第1の仮想規制部との距離が所定の範囲内であるかどうかを判定し、
前記仮想作動体と前記第1の仮想規制部との距離が前記所定の範囲内であると判定された場合であって、前記入力操作に対応する前記仮想作動体の移動方向が、前記第1の仮想規制部の表面に向かう方向の成分と、前記第1の仮想規制部の表面に沿った方向の成分とを含んでいる場合、前記シミュレート部は、前記入力操作に対応する前記仮想作動体の移動方向を前記第1の仮想規制部の形状に基づいて補正することによって、
(i)前記仮想作動体を前記第1の仮想規制部の表面に沿って移動させるための前記仮想作動体の移動方向を求め、前記動作制御部は、求められた前記移動方向に前記作動体を移動させるように構成され、または、
(ii)前記仮想作動体を前記第1の仮想規制部の表面に対して停止させ、前記動作制御部は、前記作動体を前記第1の仮想規制部に対して停止させるように構成され、または、
(iii)前記仮想作動体を前記第1の仮想規制部の表面に対して反発させ、前記動作制御部は、前記作動体を前記第1の仮想規制部に対して反発させるように構成されている、作動システム。
続きを表示(約 1,800 文字)
【請求項2】
前記シミュレート部は、前記仮想作動体と前記第1の仮想規制部との距離に基づいて、前記仮想作動体と前記第1の仮想規制部とが接触しているかどうかを判定し、
前記仮想作動体と前記第1の仮想規制部とが接触していると判定された場合、前記シミュレート部は、前記入力操作に対応する前記仮想作動体の移動方向を前記第1の仮想規制部の形状に基づいて補正するように構成されている、請求項1に記載の作動システム。
【請求項3】
前記第1の仮想規制部は、前記作動体を所定の目的位置まで案内するように構成された仮想案内面を有し、
前記第1の仮想規制部は、前記仮想作動体が前記仮想案内面を前記仮想案内面とは反対側から前記仮想案内面側へ通過できるように構成され、前記仮想作動体が前記仮想案内面を前記仮想案内面側から前記仮想案内面とは反対側へ通過できないように構成されている、請求項1に記載の作動システム。
【請求項4】
前記第1の仮想規制部は、前記作動体を所定の目的位置まで案内するように構成され、
前記シミュレート部は、前記作動体と前記目的位置との間隔が所定の間隔以下になった場合に、前記第1の仮想規制部を生成するように構成され、
前記シミュレート部は、前記作動体と前記目的位置との間隔が前記所定の間隔を超えた場合に、前記第1の仮想規制部を消滅させるように構成されている、請求項1に記載の作動システム。
【請求項5】
前記第1の仮想規制部は、前記作動体を所定の目的位置である孔部まで案内するように構成され、
前記第1の仮想規制部は、
前記仮想作動体の挿入対象部の先端の一部が前記孔部に挿入され、かつ、前記挿入対象部の中心線が前記孔部の深さ方向に対して傾斜するように、前記挿入対象部を案内する案内規制部を有する、請求項1に記載の作動システム。
【請求項6】
前記第1の仮想規制部は、
前記先端の一部が前記孔部に挿入された前記挿入対象部が前記孔部の開口部周縁に接触した状態で、前記開口部周縁との接触位置を中心とする前記挿入対象部の揺動方向を規制する揺動規制部をさらに有し、
前記揺動規制部は、前記孔部の深さ方向に対する前記挿入対象部の中心線の傾斜角度が小さくなるように前記揺動方向を規制する、請求項5に記載の作動システム。
【請求項7】
前記仮想作動体は、前記作動体に対応した本体部と、前記本体部の少なくとも一部に設けられ、前記第1の仮想規制部に対して相対的に移動する第2の仮想規制部とを有し、
前記シミュレート部は、前記第1の仮想規制部と前記第2の仮想規制部との間の位置関係を判定することによって、前記仮想作動体と前記第1の仮想規制部との位置関係を判定するように構成されている、請求項1に記載の作動システム。
【請求項8】
前記第1の仮想規制部は、前記作動体を所定の目的位置まで案内するように構成され、
前記第1の仮想規制部は、前記目的位置に近付くにつれて、前記仮想作動体の移動範囲が狭くなるように構成された仮想案内面を有し、
前記第2の仮想規制部が、前記仮想案内面に案内されることで、前記作動体が前記目的位置に案内される、請求項7に記載の作動システム。
【請求項9】
前記第1の仮想規制部は所定の厚みを有し、前記第1の仮想規制部は、前記仮想作動体の一部が先端から前記第1の仮想規制部の厚み方向に進入可能に構成され、
前記一部は、先端側から基端側へ向かって次第に太くなるように構成され、
前記一部が先端側から基端側へ向かって前記第1の仮想規制部に進入する深さが大きくなるにしたがい、前記第1の仮想規制部の表面における前記一部の存在領域が大きくなるように構成されている、請求項1に記載の作動システム。
【請求項10】
前記作動体が、所定の作業対象物に対して所定の操作を加える作業装置であり、
前記第1の仮想規制部は、前記作業対象物の内部に配置され、
前記シミュレート部は、前記仮想作動体が前記第1の仮想規制部に接触するように前記仮想作動体を動作させ、
前記動作制御部は、前記仮想作動体の動作により、前記作業対象物の表面に圧力を掛けながら作業を行うことを可能にする、請求項1に記載の作動システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作動システムに関する。
続きを表示(約 5,400 文字)
【背景技術】
【0002】
従来、人に代わって作業を行うロボット等の作業装置が作業を行う際に、作業装置が障害物に干渉する等の不都合が生じるのを防止するための技術が提案されている(たとえば特許文献1を参照)。特許文献1に記載の干渉防止装置は、ロボットに予めティーチングされた内容に基づいて、ロボットの動作前にロボットの動作軌跡を算出し、算出結果に基づいてロボットが障害物と干渉するかどうかを判定し、ロボットが障害物と干渉すると判断した場合にはロボットに待機指令を出す等の制御を行うように構成されている。
【先行技術文献】
【特許文献】
【0003】
特開平8-36410号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の技術は、ティーチングに基づく予め定められた軌跡に沿った動作が制御対象である。このため、仮に、ユーザが操作装置を介して任意の軌跡でロボットを動作させる場合には、特許文献1に記載の技術ではロボットの動作を適切に制御できない可能性がある。具体的には、ユーザが操作装置を介して任意の軌跡でロボットを動作させる場合には、ロボットが想定外の軌跡で動作する可能性があるため、特許文献1に記載の技術では、たとえば、ロボットが作業中に障害物に干渉するなど、ロボットの動作を適切に制御できない可能性がある。
【0005】
本発明は、上記問題に鑑みて、作動体がユーザからの任意の操作によって想定外の軌跡で動作する可能性があっても、作動体の動作を適切に制御することを可能にする作動システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の作動システムは、ユーザによる操作装置からの入力操作に応じて所定の動作を行う作動体の動作をシミュレートするために、仮想空間において、前記作動体に対応する仮想作動体と、前記仮想作動体の移動を規制するために仮想的に設けられる第1の仮想規制部との間の位置関係をシミュレートするシミュレート部と、前記シミュレート部によりシミュレートされた位置関係に応じて、前記作動体の動作を制御する動作制御部とを備えた作動システムであって、前記シミュレート部は、前記作動体への入力操作がなされた際に、前記入力操作に並行して、前記仮想空間において、前記入力操作に対応する内容で前記仮想作動体を動作させて、前記仮想作動体と前記第1の仮想規制部との間の位置関係を所定の時間間隔で判定し、前記動作制御部は、前記シミュレート部による判定の結果に基づいて、前記入力操作に基づく動作指令に並行して前記作動体を動作させるように構成され、前記シミュレート部は、前記仮想作動体と前記第1の仮想規制部との距離が所定の範囲内であるかどうかを判定し、前記仮想作動体と前記第1の仮想規制部との距離が前記所定の範囲内であると判定された場合であって、前記入力操作に対応する前記仮想作動体の移動方向が、前記第1の仮想規制部の表面に向かう方向の成分と、前記第1の仮想規制部の表面に沿った方向の成分とを含んでいる場合、前記シミュレート部は、前記入力操作に対応する前記仮想作動体の移動方向を前記第1の仮想規制部の形状に基づいて補正することによって、(i)前記仮想作動体を前記第1の仮想規制部の表面に沿って移動させるための前記仮想作動体の移動方向を求め、前記動作制御部は、求められた前記移動方向に前記作動体を移動させるように構成され、または、(ii)前記仮想作動体を前記第1の仮想規制部の表面に対して停止させ、前記動作制御部は、前記作動体を前記第1の仮想規制部に対して停止させるように構成され、または、(iii)前記仮想作動体を前記第1の仮想規制部の表面に対して反発させ、前記動作制御部は、前記作動体を前記第1の仮想規制部に対して反発させるように構成されている。
【発明の効果】
【0007】
本発明によれば、作動体がユーザからの任意の操作によって想定外の軌跡で動作する可能性があっても、作動体の動作を適切に制御することを可能にする作動システムを提供することができる。
【図面の簡単な説明】
【0008】
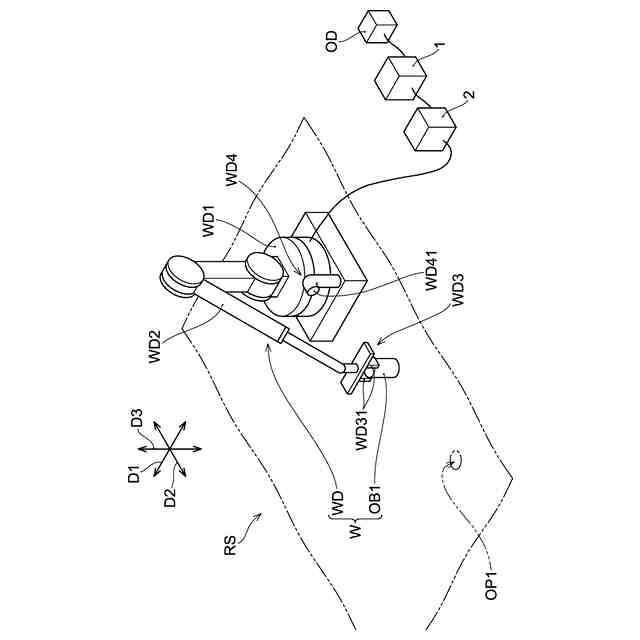
本発明の一実施形態に係る作動システムの一例を模式的に示す斜視図である。
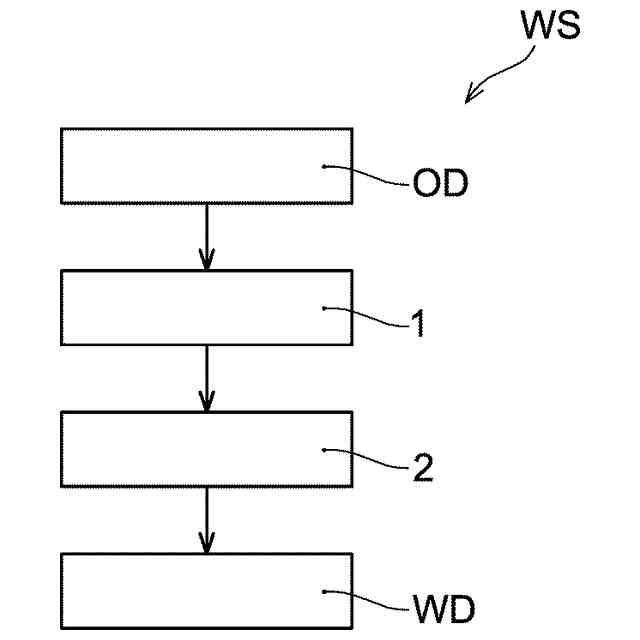
図1に示される作動システムの構成を示すブロック図である。
図1に示される作動システムのシミュレート部を模式的に示す図である。
図3に示される表示部に表示されているシミュレーションの画像を示す図である。
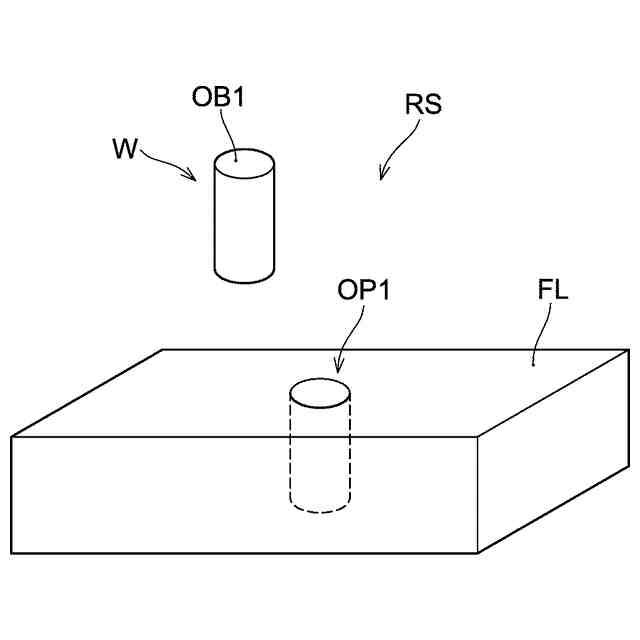
図1に示される作動システムの作動体と目的位置の一例を模式的に示す斜視図である。
図5に示される作動体に対応する仮想作動体が、第1の仮想規制部によって仮想目的位置に案内される様子を模式的に示す斜視図である。
図1に示される作動システムのシミュレート部が、仮想作動体を第1の仮想規制部に当接させながら仮想作動体を第1の仮想規制部の表面に沿って移動させる場合の、仮想作動体を移動させる方向を求める方法の一例を模式的に示す図である。
図5に示される作動体に対応する仮想作動体が、第1の仮想規制部によって仮想目的位置に案内される様子を模式的に示す図であって、仮想作動体が傾いている場合の斜視図である。
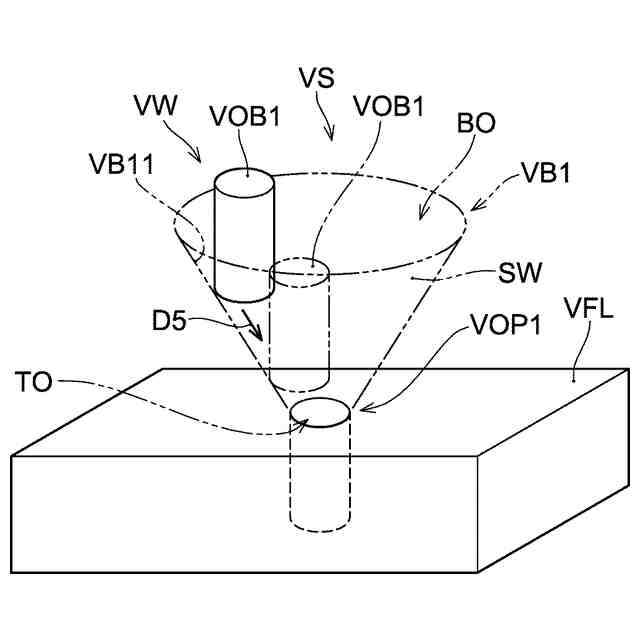
図5に示される作動体に対応する仮想作動体が、仮想目的位置である孔部に挿入される様子を模式的に示す図であって、仮想作動体が孔部に対して傾いている場合の斜視図である。
図5に示される作動体に対応する仮想作動体が、仮想目的位置である孔部に挿入される様子を模式的に示す図であって、仮想作動体が孔部の壁面に沿って押付けられている場合の斜視図である。
ディスプレイの画面に、仮想作業対象物と仮想目的位置との位置関係が表示されている状態を模式的に示す図である。
ディスプレイの画面に、仮想作業対象物の先端面と仮想目的位置との位置関係が表示されている状態を模式的に示す図である。
ディスプレイの画面に、仮想作業対象物の先端面と仮想目的位置との位置関係が表示されている状態を模式的に示す図である。
ディスプレイの画面に、仮想作業対象物の先端面と仮想目的位置との位置関係が表示されている状態を模式的に示す図である。
図5に示される作動体に対応する仮想作動体が、第1の仮想規制部の側壁を外側から内側へ通過する様子を示す斜視図である。
角柱状の仮想作動体が、第1の仮想規制部によって仮想目的位置に案内される様子を模式的に示す斜視図である。
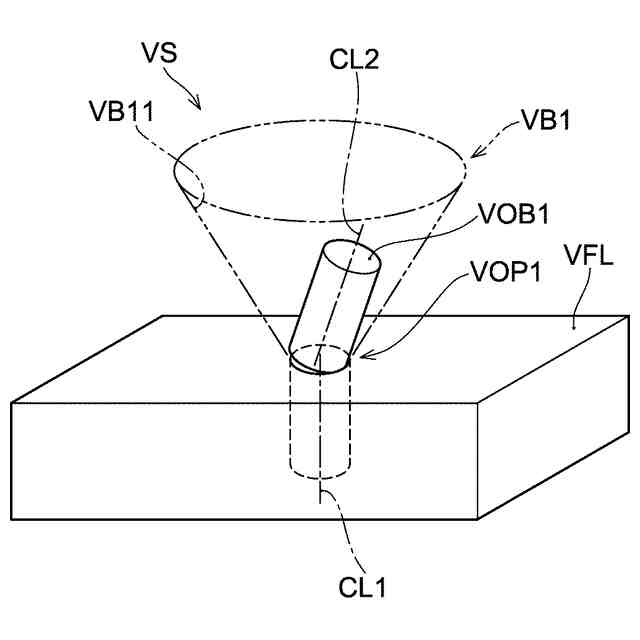
本発明の他の実施形態に係る作動システムの一例を模式的に示す図であって、仮想作動体の挿入対象部が仮想目的位置である孔部の軸心に対して斜め方向に案内される態様を示す斜視図である。
図17に示される挿入対象部の先端が、孔部に挿入される様子を模式的に示す斜視図である。
図18に示される態様において、第1の仮想規制部を消滅させた状態を示す斜視図である。
図19に示される態様において、挿入対象部の先端が孔部に挿入されている状態を示す部分断面図である。
図20に示される挿入対象部が、孔部の開口部周縁に接触している状態を模式的に示す部分断面図である。
図21に示される挿入対象部を径方向両側から挟むように設けられる第1の仮想規制部を発生させた状態を模式的に示す斜視図である。
図22に示される挿入対象部が揺動して、孔部の開口部周縁に複数の位置で接触している状態を模式的に示す部分断面図である。
図23に示される挿入対象部が孔部から抜ける方向に移動した状態を模式的に示す部分断面図である。
図24に示される挿入対象部が揺動して、孔部の開口部周縁に複数の位置で接触している状態を模式的に示す部分断面図である。
挿入対象部の挿入可能条件が満たされた状態を模式的に示す部分断面図である。
本発明の他の実施形態に係る作動システムの一例を模式的に示す図であって、作動体によって作業対象物を把持する態様を示す斜視図である。
図27に示される作動体に対応する仮想作動体と、仮想作動体によって把持される仮想作業対象物とを模式的に示す斜視図である。
図28に示される仮想作動体が、仮想作業対象物を把持するための目的位置に位置決めされる様子を模式的に示す斜視図である。
図28に示される仮想作動体により仮想作業対象物が把持された状態を模式的に示す斜視図である。
作動体によって作業対象物を把持する態様において、第1の仮想規制部と第2の仮想規制部とを合致させる前に、2つの第1の仮想規制部同士を結ぶ方向と、2つの第2の仮想規制部同士を結ぶ方向とが一致しない場合の、第1の仮想規制部と第2の仮想規制部との位置関係を模式的に示す図である。
本発明の他の実施形態に係る作動システムの一例を模式的に示す図であって、仮想作動体が所定の移動経路に沿って案内される態様を示す斜視図である。
本発明の他の実施形態に係る作動システムの一例を模式的に示す図であって、リング状の第2の仮想規制部と、第2の仮想規制部を案内する線状の第1の仮想規制部とを備える態様を示す斜視図である。
図33に示される態様の変形例を示す図であって、第2の仮想規制部が第1の仮想規制部の軸周り方向に回転できない構成を示す斜視図である。
本発明の他の実施形態に係る作動システムの一例を模式的に示す図であって、仮想規制部が板状に形成され、棒状の仮想作動体が仮想規制部の厚み方向に進入可能な構成を示す斜視図である。
本発明の他の実施形態に係る作動システムの一例を模式的に示す図であって、仮想規制部が仮想作業対象物の内部に配置された構成を示す斜視図である。
図36に示される態様の変形例を示す図であって、仮想作動体が仮想規制部に面接触する構成を示す斜視図である。
本発明の他の実施形態に係る作動システムの一例を模式的に示す図であって、複数の作動体によって作業が行われる場合に、複数の仮想作動体の間に設けた仮想規制部によって作動体同士の接触を抑制する態様を示す斜視図である。
図38に示される態様において、仮想規制部を消滅させた状態を示す斜視図である。
本発明の他の実施形態に係る作動システムの一例を模式的に示す図であって、複数の作動体によって作業が行われる場合に、各仮想作動体をそれぞれ包囲するように設けられた仮想規制部によって作動体同士の接触を抑制する態様を示す斜視図である。
図40に示される態様において、仮想規制部同士が接触している状態を示す斜視図である。
図40に示される態様において、仮想規制部の大きさを小さくした状態を示す斜視図である。
図40に示される態様において、仮想規制部を消滅させた状態を示す斜視図である。
本発明の他の実施形態に係る作動システムの一例を模式的に示す図であって、作動体を仮想規制部によって作業対象物の移動に追従させる態様を示す斜視図である。
図44に示される態様において、仮想作業体を仮想規制部に接触させた状態を示す斜視図である。
図44に示される態様において、仮想規制部を消滅させた状態を示す斜視図である。
本発明の他の実施形態に係る作動システムの一例を模式的に示す図であって、枠状の仮想規制部によって仮想作動体の動きを第1の仮想規制部の内側の範囲内に規制する態様を示す斜視図である。
【発明を実施するための形態】
【0009】
以下、図面を参照し、本発明の一実施形態の作動システムを説明する。なお、以下に示す実施形態はあくまで一例であり、本発明の作動システムは、以下の実施形態に限定されるものではない。
【0010】
以下に説明する作動システムWSは、ユーザによる操作装置からの入力操作に応じて所定の動作を行う作動体の動作をシミュレートすることで、作動体の動作を適切に制御することを可能にする。本明細書において、作動体は、ユーザによる操作装置OD(図1参照)からの入力操作に応じて所定の動作を行う任意の構造体を言う。以下に示す実施形態では、作動体は、ロボット等の作業装置WD(図1参照)によって構成されているが、作動体はロボット等の作業装置に限定されない。なお、作動体は、作業装置WD等、1つの構造体のみによって構成されていてもよいし、1つの構造体に加え、当該構造体に付随して移動する他の要素を含んでいてもよい。たとえば、作業装置WDによって所定の作業対象物OB1(図1参照)が操作される場合(作業装置WDの一部と作業対象物OB1とが一体的に移動する場合)、第1作動要素である作業装置WDと、第2作動要素である作業対象物OB1を1つの作動体として扱う。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
23日前
個人
折りたたみ工具
6日前
株式会社ジャノメ
ロボット
2か月前
株式会社三協システム
製函機
4日前
株式会社三協システム
移載装置
3日前
CKD株式会社
把持装置
5日前
株式会社不二越
ロボット操作装置
11日前
住友重機械工業株式会社
教示装置
2か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社不二越
ロボットシステム
17日前
個人
ペグハンマおよびペグハンマ用部品
2か月前
SMC株式会社
着脱装置
4日前
日本精工株式会社
締結用工具
20日前
川崎重工業株式会社
ロボット
2か月前
株式会社ミクロブ
把持装置
5日前
太陽パーツ株式会社
アシストスーツ
6日前
ARMA株式会社
ジョイントフレーム
18日前
工機ホールディングス株式会社
作業機
2か月前
トヨタ自動車株式会社
カプラ接続治具
27日前
工機ホールディングス株式会社
作業機
2か月前
株式会社不二越
ロボットシステム
6日前
住友重機械工業株式会社
支援装置
2か月前
住友重機械工業株式会社
支援装置
2か月前
株式会社不二越
ロボットシステム
3日前
積水ハウス株式会社
フィルム除去具
1か月前
トヨタ自動車株式会社
歩行ロボット
9日前
アピュアン株式会社
衝撃工具
2か月前
株式会社マキタ
電気機器
2か月前
ホシデン株式会社
分解用治具
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社リコー
多関節ロボット
2か月前
ダイハツ工業株式会社
移載治具
18日前
大和ハウス工業株式会社
ねじ回転工具
4日前
株式会社不二越
協働ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ


































