TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025128417
公報種別
公開特許公報(A)
公開日
2025-09-03
出願番号
2022109000
出願日
2022-07-06
発明の名称
電子制御サスペンションの制御装置および制御方法
出願人
Astemo株式会社
代理人
弁理士法人広和特許事務所
主分類
B60G
17/018 20060101AFI20250827BHJP(車両一般)
要約
【課題】後輪ばね下状態の推定精度が低下する場合でも、制振性能の悪化を抑制することができる電子制御サスペンションの制御装置および制御方法を提供する。
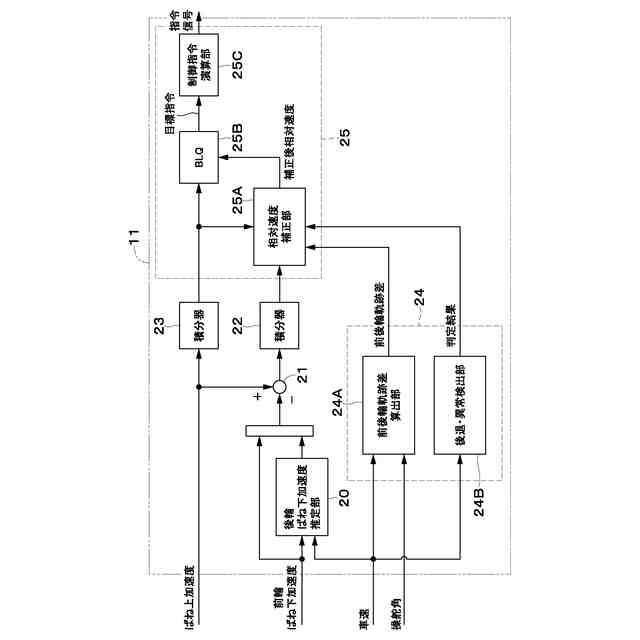
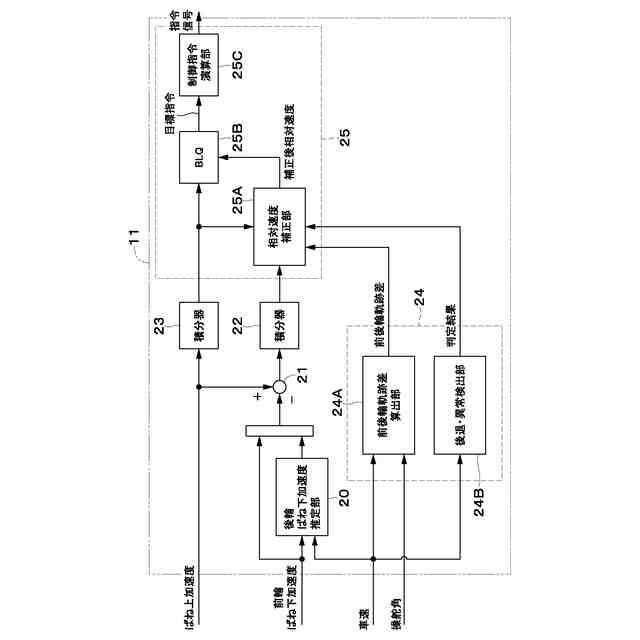
【解決手段】可変ダンパ7は、前輪および後輪を有する車両に設けられている。コントローラ11は、車両の走行時、前輪および後輪の軌跡の対応関係を検出する軌跡対応関係検出部24と、後輪の可変ダンパ7の制御量である制御量指令値を、軌跡の対応関係に応じて、算出する指令値算出部25とを備えている。
【選択図】図3
特許請求の範囲
【請求項1】
前輪および後輪を有する車両に設けられた電子制御サスペンションの制御装置であって、
前記車両の走行時、前記前輪および前記後輪の軌跡の対応関係を検出する軌跡対応関係検出部と、
前記後輪の電子制御サスペンションの制御量である制御量指令値を、前記軌跡の対応関係に応じて、算出する指令値算出部と、
を備える電子制御サスペンションの制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記指令値算出部は、
前記軌跡の対応関係が一または二以上の条件すべてに対して真の場合には、前記前輪の状態量である前輪状態量を参照して算出する前記後輪の状態量である後輪状態量を用いて前記制御量指令値を算出し、
前記条件に偽が含まれる場合には、前記条件すべてに対して真の場合とは異なる前記制御量指令値を算出する
請求項1に記載の電子制御サスペンションの制御装置。
【請求項3】
前記前輪状態量は、前記前輪のばね下の加速度または前記前輪のばね下の加速度を微分若しくは積分して得られる前記前輪の加速度関連の状態量であり、
前記後輪状態量は、前記車両の車速および前記車両のホイールベースを用いて、前記前輪の前記加速度関連の状態量を前記後輪の位相と一致させた状態量である
請求項2に記載の電子制御サスペンションの制御装置。
【請求項4】
前記指令値算出部は、
前記条件に偽が含まれる場合には、前記条件すべてに対して真の場合とは異なる前記制御量指令値を、前記車両のばね上速度を参照して算出する
請求項2または3に記載の電子制御サスペンションの制御装置。
【請求項5】
前記条件は、前記車両の車速と舵角に基づく前記前輪と前記後輪との軌跡差の絶対値が閾値以下、前記車両が前進状態、および、前記車速の検出もしくは推定の状態が正常、の何れかである
請求項2または3に記載の電子制御サスペンションの制御装置。
【請求項6】
前記後輪状態量として前記後輪のばね下速度である後輪ばね下速度または前記後輪のばね下加速度である後輪ばね下加速度を算出する後輪ばね下状態量算出部を備える
請求項2または3に記載の電子制御サスペンションの制御装置。
【請求項7】
前輪および後輪を有する車両に設けられ、減衰力を調整可能な電子制御サスペンションの制御方法であって、
前記前輪の状態量である前輪状態量を算出する前輪状態量算出ステップと、
前記前輪状態量を用いて前記後輪の状態量である後輪状態量を算出する後輪状態量算出ステップと、
前記後輪の電子制御サスペンションの制御量である制御量指令値を算出する指令値算出ステップであって、前記車両の走行状態が、一または二以上の条件すべてが真の場合には前記制御量指令値を前記後輪状態量を用いて算出し、前記条件に偽が含まれる場合には前記条件すべてに対して真の場合とは異なる前記制御量指令値を算出する指令値算出ステップと、
を備える電子制御サスペンションの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、例えば4輪自動車等の車両に好適に用いられる電子制御サスペンションの制御装置および制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、前輪の変位、速度、加速度等のような前輪ばね下振動情報を検知し、この前輪ばね下振動情報と車両のホイールベースとに基づいて、後輪ばね下振動情報を推定する推定装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2016-190621号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
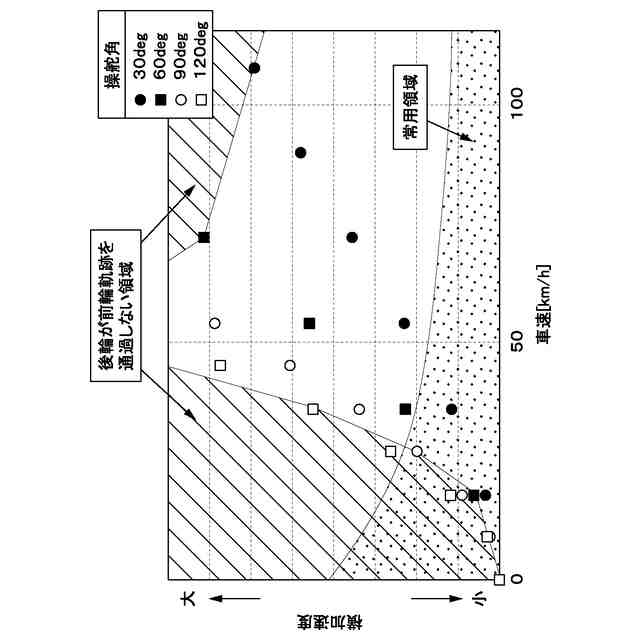
ところで、特許文献1に開示された推定装置では、前輪ばね下振動情報をホイールベース分遅らせた情報から後輪ばね下振動情報を推定している。しかしながら、この推定方法は、前輪と後輪が同じ軌跡を通過することを前提としている。このため、前輪と後輪の走行軌跡が異なる条件では推定精度が悪化する。前輪と後輪の軌跡がずれる条件としては、(1)前後輪軌跡差が大きい超低速時、(2)前後輪軌跡差が大きい大舵角時や横滑り時、(3)遅れの算出が不能な車速信号不正時、(4)後輪が前輪よりも先に路面入力を受ける後退時等が考えられる。
【0005】
本発明の一実施形態の目的は、後輪ばね下状態の推定精度が低下する場合でも、制振性能の悪化を抑制することができる電子制御サスペンションの制御装置および制御方法を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一実施形態は、前輪および後輪を有する車両に設けられた電子制御サスペンションの制御装置であって、前記車両の走行時、前記前輪および前記後輪の軌跡の対応関係を検出する軌跡対応関係検出部と、前記後輪の電子制御サスペンションの制御量である制御量指令値を、前記軌跡の対応関係に応じて、算出する指令値算出部と、を備えている。
【0007】
また、本発明の一実施形態は、前輪および後輪を有する車両に設けられ、減衰力を調整可能な電子制御サスペンションの制御方法であって、前記前輪の状態量である前輪状態量を算出する前輪状態量算出ステップと、前記前輪状態量を用いて前記後輪の状態量である後輪状態量を算出する後輪状態量算出ステップと、前記後輪の電子制御サスペンションの制御量である制御量指令値を算出する指令値算出ステップであって、前記車両の走行状態が、一または二以上の条件すべてが真の場合には前記制御量指令値を前記後輪状態量を用いて算出し、前記条件に偽が含まれる場合には前記条件すべてに対して真の場合とは異なる前記制御量指令値を算出する指令値算出ステップと、を備えている。
【発明の効果】
【0008】
本発明の一実施形態によれば、後輪ばね下状態の推定精度が低下する場合でも、制振性能の悪化を抑制することができる。
【図面の簡単な説明】
【0009】
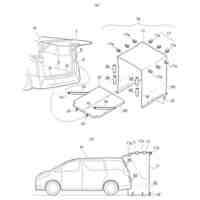
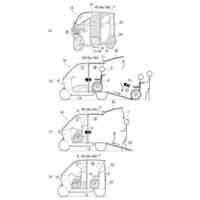
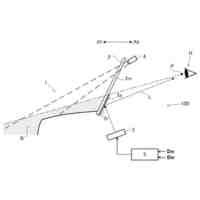
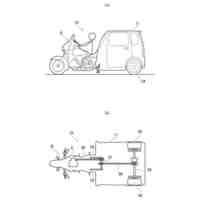
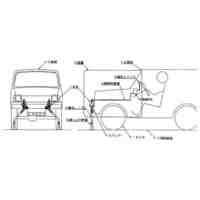
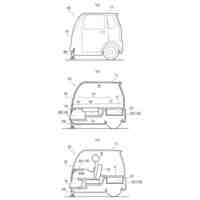
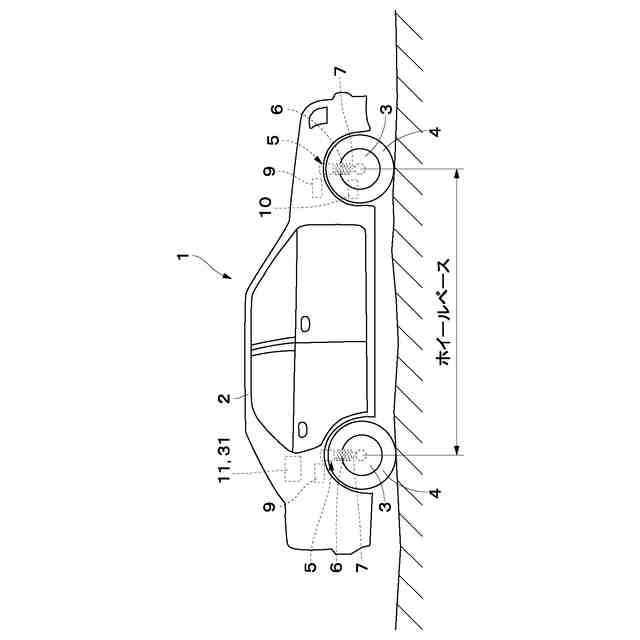
第1,第2の実施形態によるコントローラが適用された車両を示す正面図である。
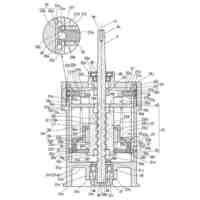
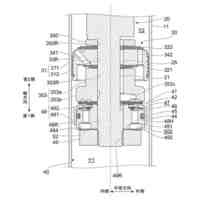
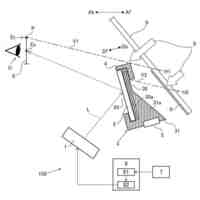
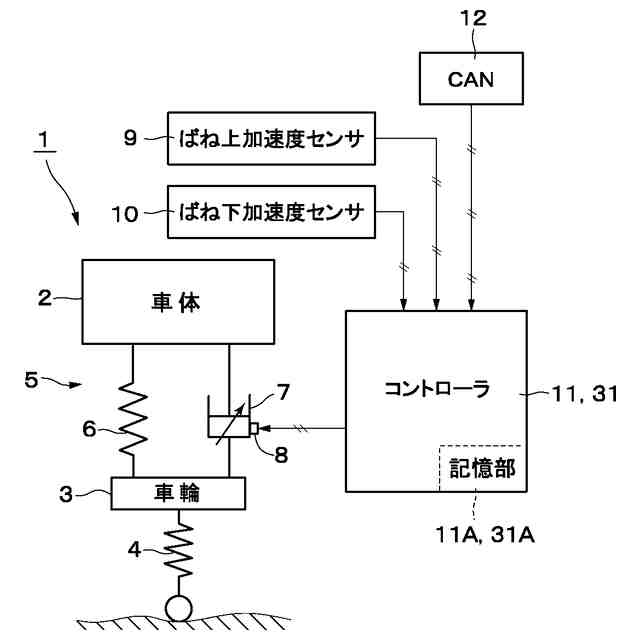
第1,第2の実施形態によるコントローラを模式的に示す図である。
第1の実施形態によるコントローラを示す制御ブロック図である。
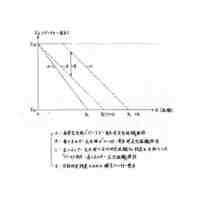
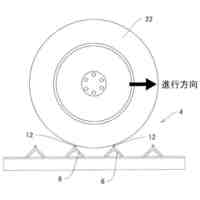
車両の速度と横加速度との関係から前輪と後輪の軌跡がずれる条件を示す説明図である。
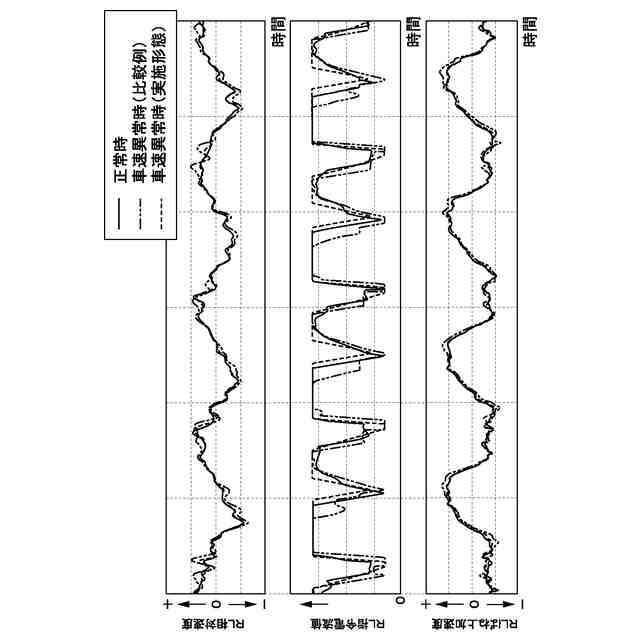
ばね上とばね下との間の相対速度、指令電流値、ばね上加速度の時間変化を示す特性線図である。
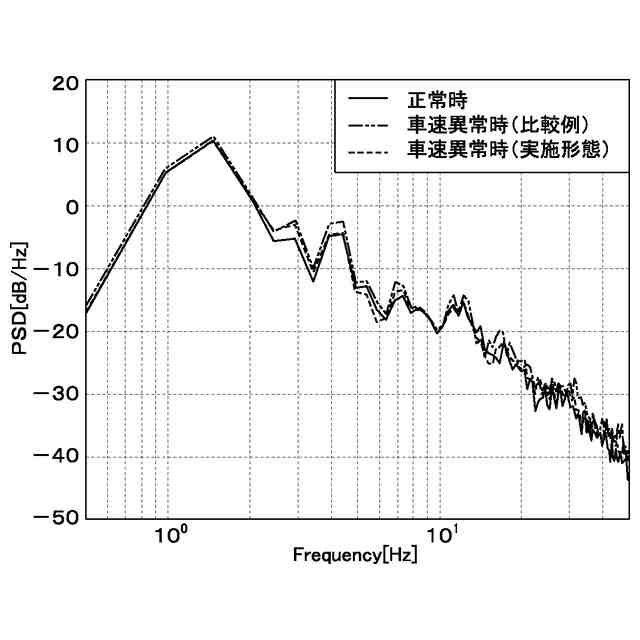
加速度PSDの周波数特性を示す特性線図である。
第2の実施形態によるコントローラを示す制御ブロック図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態による電子制御サスペンションの制御装置を4輪自動車に適用した場合を例に挙げ、添付図面に従って詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
Astemo株式会社
操舵入力装置
2日前
Astemo株式会社
緩衝装置、懸架装置
2日前
個人
カーテント
3か月前
個人
タイヤレバー
1か月前
個人
車窓用防虫網戸
3か月前
個人
警告装置
4か月前
個人
前輪キャスター
11日前
個人
小型EVシステム
4か月前
個人
タイヤ脱落防止構造
8日前
個人
ルーフ付きトライク
28日前
個人
ホイルのボルト締結
2か月前
日本精機株式会社
ケース
5か月前
個人
車輪清掃装置
3か月前
日本精機株式会社
表示装置
5か月前
日本精機株式会社
表示装置
18日前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
1か月前
個人
アンチロール制御装置
5か月前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
5か月前
日本精機株式会社
表示装置
1か月前
個人
車両通過構造物
1か月前
個人
キャンピングトライク
2か月前
個人
ワイパーゴム性能保持具
3か月前
個人
車両用スリップ防止装置
2か月前
個人
乗合路線バスの客室装置
1か月前
個人
キャンピングトレーラー
2か月前
個人
アクセルのソフトウェア
2か月前
個人
ブレーキシステム
5か月前
個人
音声ガイド、音声サービス
1か月前
株式会社豊田自動織機
産業車両
1か月前
個人
車載小物入れ兼雨傘収納具
2か月前
日本精機株式会社
車室演出装置
8日前
日本精機株式会社
車載表示装置
2か月前
個人
自動車ドア開度規制ベルト
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ