TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025131223
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028832
出願日
2024-02-28
発明の名称
ロボット用エンドエフェクタ
出願人
個人
代理人
弁理士法人筒井国際特許事務所
主分類
B24B
27/00 20060101AFI20250902BHJP(研削;研磨)
要約
【課題】応答性を高めつつ加工精度にばらつきが生じることを抑える。
【解決手段】垂直多関節ロボットに固定される固定ユニット50と、固定ユニット50に対して回転軸64と共に回転軸64の軸方向に移動可能な可動ユニット60と、永久磁石MG1ないしMG6および第1,第2コイルCL1,CL2を有し、可動ユニット60を移動させる第1,第2ボイスコイルモータVCM1,VCM2と、を備え、固定ユニット50には、回転軸64を挟んで互いに対向配置され、かつ永久磁石MG1ないしMG6がそれぞれ固定された第1,第2固定ベース側壁部56,57が設けられ、可動ユニット60には、回転軸64を挟んで互いに対向配置され、第1,第2固定ベース側壁部56,57のそれぞれと対向し、かつ第1,第2コイルCL1,CL2がそれぞれ固定された第1,第2可動ベース側壁部67,68が設けられる。
【選択図】図6
特許請求の範囲
【請求項1】
回転工具を回転させる回転軸を備えたロボット用エンドエフェクタであって、
ロボットに固定される固定部材と、
前記固定部材に対して前記回転軸と共に前記回転軸の軸方向に移動可能な可動部材と、
固定子および可動子を有し、前記可動部材を前記固定部材に対して移動させる一対の電動モータと、
を備え、
前記固定部材には、前記回転軸を挟んで互いに対向配置され、かつ前記固定子がそれぞれ固定された一対の固定壁部が設けられ、
前記可動部材には、前記回転軸を挟んで互いに対向配置されると共に、一対の前記固定壁部のそれぞれと対向し、かつ前記可動子がそれぞれ固定された一対の可動壁部が設けられる、
ロボット用エンドエフェクタ。
続きを表示(約 870 文字)
【請求項2】
請求項1に記載のロボット用エンドエフェクタにおいて、
前記固定子は、前記回転軸の軸方向と直交する方向に間隔を空けて対向配置された少なくとも一対の永久磁石を備え、
前記可動子は、一対の前記永久磁石の間に配置され、駆動電流の供給により前記回転軸の軸方向に移動される少なくとも1つのコイルを備える、
ロボット用エンドエフェクタ。
【請求項3】
請求項1に記載のロボット用エンドエフェクタにおいて、
前記固定部材は、前記ロボットに固定される固定ベースを備え、
前記可動部材は、前記固定ベースと対向する可動ベースを備え、
前記固定ベースと前記可動ベースとの間に、前記可動ベースの前記固定ベースに対する移動を案内するレール部材が設けられる、
ロボット用エンドエフェクタ。
【請求項4】
請求項3に記載のロボット用エンドエフェクタにおいて、
前記固定ベースと前記可動ベースとの間に、前記可動ベースの前記固定ベースに対する移動状態を検出するエンコーダが設けられる、
ロボット用エンドエフェクタ。
【請求項5】
請求項3に記載のロボット用エンドエフェクタにおいて、
前記可動ベースには、前記回転軸を回転自在に支持すると共に、前記可動ベースに対する前記回転軸の軸方向への移動を規制する回転軸ブラケットが設けられる、
ロボット用エンドエフェクタ。
【請求項6】
請求項1に記載のロボット用エンドエフェクタにおいて、
前記回転軸の軸方向基端部が、前記回転軸を回転させる駆動源に連結され、
前記回転軸の軸方向先端部に、前記回転工具が設けられる、
ロボット用エンドエフェクタ。
【請求項7】
請求項6に記載のロボット用エンドエフェクタにおいて、
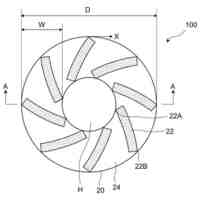
前記回転工具が、加工対象物の表面を研磨する研磨工具である、
ロボット用エンドエフェクタ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに装着されるエンドエフェクタに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
例えば、特許文献1には、研磨対象物としてのウェハの被研磨面を研磨する研磨装置が記載されている。特許文献1に記載された研磨装置は、基台上においてXYZ軸方向に移動可能な研磨ヘッドを備えており、当該研磨ヘッドは、スピンドルにより回転駆動される。また、研磨ヘッドを形成するヘッドハウジングの内部には、反押圧装置(エアシリンダ)が収容されており、当該反押圧装置は、研磨部材のウェハに対する押し付け力を、空気の給排により調整可能となっている。
【先行技術文献】
【特許文献】
【0003】
特開2008-105103号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載された技術では、圧縮性流体である空気の圧力を制御することで、研磨部材(研磨ヘッド)のウェハに対する押し付け力を調整するため、応答性が低い上に加工精度にばらつきが生じ易いという問題があった。
【0005】
本発明の目的は、応答性を高めつつ加工精度にばらつきが生じることを抑制可能なロボット用エンドエフェクタを提供することにある。
【課題を解決するための手段】
【0006】
ロボット用エンドエフェクタの一態様では、回転工具を回転させる回転軸を備えたロボット用エンドエフェクタであって、ロボットに固定される固定部材と、前記固定部材に対して前記回転軸と共に前記回転軸の軸方向に移動可能な可動部材と、固定子および可動子を有し、前記可動部材を前記固定部材に対して移動させる一対の電動モータと、を備え、前記固定部材には、前記回転軸を挟んで互いに対向配置され、かつ前記固定子がそれぞれ固定された一対の固定壁部が設けられ、前記可動部材には、前記回転軸を挟んで互いに対向配置されると共に、一対の前記固定壁部のそれぞれと対向し、かつ前記可動子がそれぞれ固定された一対の可動壁部が設けられる。
【発明の効果】
【0007】
本発明によれば、応答性を高めつつ加工精度にばらつきが生じることを抑制可能なロボット用エンドエフェクタを実現することができる。
【図面の簡単な説明】
【0008】
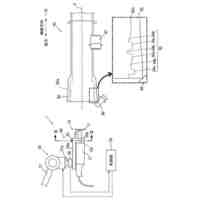
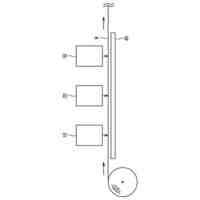
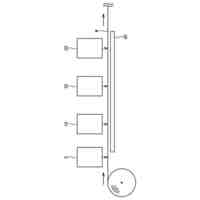
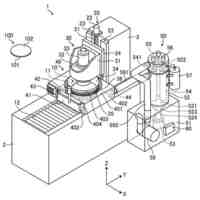
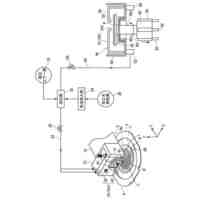
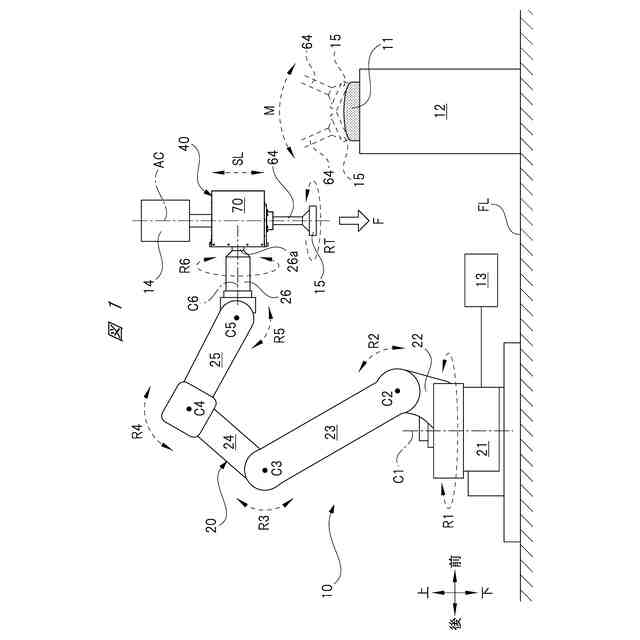
研磨モジュールが装着された垂直多関節ロボットを示す図である。
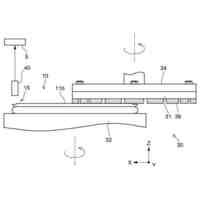
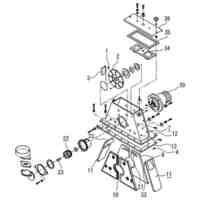
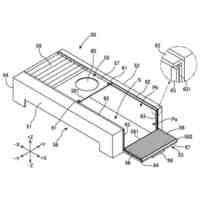
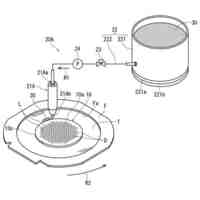
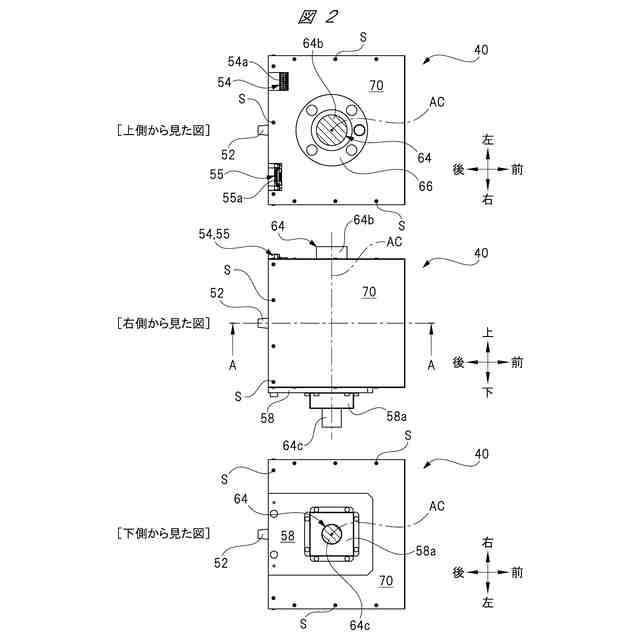
研磨モジュール単体を3方向から見た図である。
研磨モジュール(カバー無)を駆動モータ側から見た斜視図である。
研磨モジュール(カバー無)を研磨パッド側から見た斜視図である。
図2のA-A線に沿う断面図(カバー無)である。
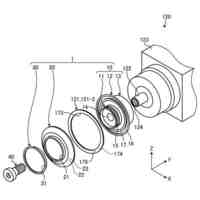
図5のB-B線に沿う断面図である。
固定ユニットの電源コネクタの周辺を示す斜視図である。
固定ユニットのエンコーダの周辺を示す斜視図である。
可動ユニットのコイル側を示す斜視図である。
可動ユニットの可動側レール側を示す斜視図である。
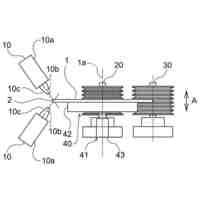
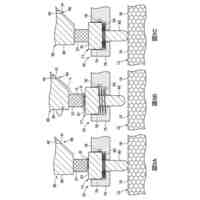
ボイスコイルモータの動作説明図である。
研磨モジュールの動作を説明する図(カバー無)である。
【発明を実施するための形態】
【0009】
以下、本発明の一実施の形態について図面を用いて詳細に説明する。
【0010】
<研磨装置>
図1に示されるように、研磨装置10は、加工対象物11(図中網掛)の表面を研磨する産業機械である。具体的には、研磨装置10は、垂直多関節ロボット20と、当該垂直多関節ロボット20のアーム先端に装着される研磨モジュール40と、を備えている。そして、垂直多関節ロボット20および研磨モジュール40の前側には、加工対象物11が載せられる作業台12が設置されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
包丁研ぎ器具
2か月前
株式会社松風
研磨用ゴム砥石
3日前
株式会社クボタ
管研削装置
3か月前
株式会社ディスコ
被加工物の加工方法
24日前
株式会社東京精密
加工装置
3日前
ノリタケ株式会社
超砥粒ホイール
3日前
株式会社ニッチュー
ブラスト装置
3か月前
株式会社東京精密
加工方法
5日前
株式会社東京精密
加工装置
5日前
ノリタケ株式会社
研磨パッド
3日前
秀和工業株式会社
処理装置および処理方法
26日前
トヨタ自動車株式会社
回転砥石の製造方法
2か月前
株式会社アイドゥス企画
受動変形内面研磨ホイール
2か月前
株式会社東京精密
研削装置
1か月前
旭化成株式会社
研磨パッド
1か月前
Mipox株式会社
研磨部材の製造方法
1か月前
株式会社ディスコ
加工装置
1か月前
株式会社東京精密
ダイシング装置
3日前
Mipox株式会社
研磨部材の製造方法
1か月前
Mipox株式会社
研磨部材の製造方法
1か月前
株式会社ディスコ
研削装置
2か月前
株式会社東京精密
ハブレスブレード
5日前
ノリタケ株式会社
砥材及びその製造方法
10日前
株式会社ディスコ
研磨装置
11日前
株式会社ディスコ
固定機構
2か月前
信越半導体株式会社
ウェーハの加工方法
12日前
株式会社東京精密
研削装置
3日前
信越半導体株式会社
ウェーハの加工方法
12日前
株式会社ディスコ
切削装置
17日前
株式会社ディスコ
切削装置
2か月前
株式会社ディスコ
切削装置
24日前
株式会社東京精密
加工装置
24日前
株式会社東京精密
スラリー供給装置
25日前
株式会社ディスコ
加工装置
26日前
株式会社ディスコ
研削装置
1か月前
株式会社東京精密
加工装置
24日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ