TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025131941
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2022091717
出願日
2022-06-06
発明の名称
アクチュエータドライバおよびこれを用いたカメラモジュール、電子機器
出願人
ローム株式会社
代理人
個人
,
個人
主分類
G03B
5/00 20210101AFI20250903BHJP(写真;映画;光波以外の波を使用する類似技術;電子写真;ホログラフイ)
要約
【課題】複数のボイスコイルを備えるアクチュエータを駆動可能なアクチュエータドライバを提供する。
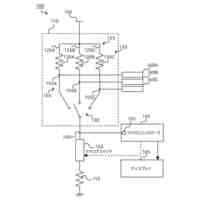
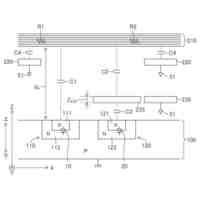
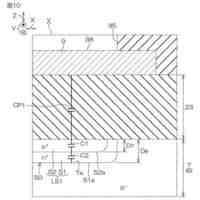
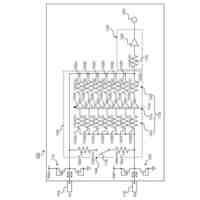
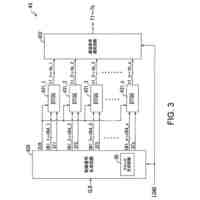
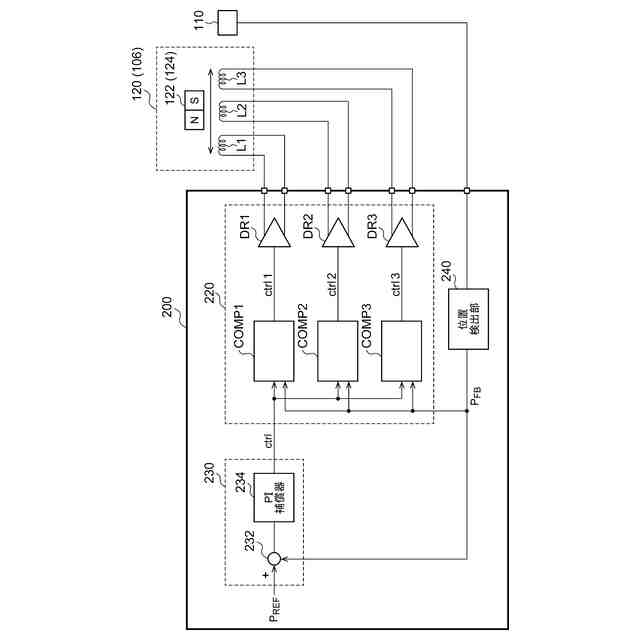
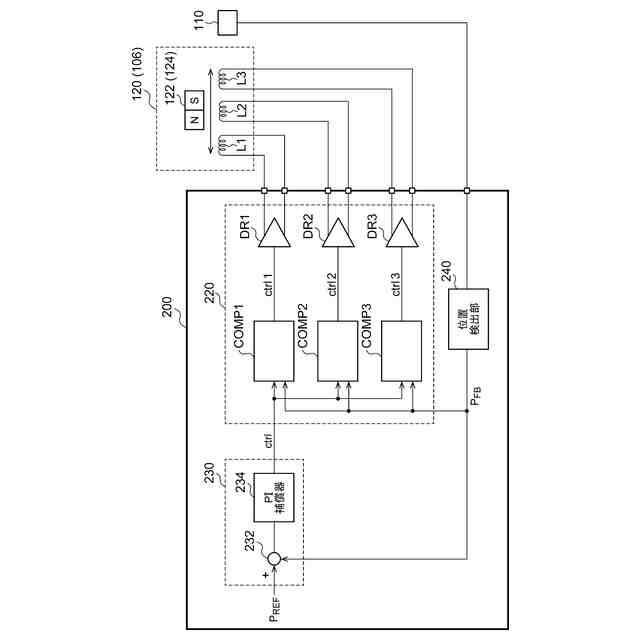
【解決手段】アクチュエータ120は、磁石122を含む可動子124と、可動子124の可動方向に沿って配置される複数のボイスコイルL1~L3を含む。コントローラ230は、制御信号ctrlを生成する。駆動部220は、制御信号ctrlに応じて、複数のボイスコイルL1~L3を駆動する。駆動部220の補正部COMPiは、ボイスコイルLiに対応し、可動子124の位置を示す位置検出信号P
FB
に応じて、制御信号ctrlを補正する。ドライバDRiは、対応する補正部COMPiの出力ctrl’に応じて、対応するボイスコイルLiを駆動する。
【選択図】図3
特許請求の範囲
【請求項1】
可動部を位置決めするアクチュエータを駆動するアクチュエータドライバであって、
前記アクチュエータは、磁石を含む可動子と、前記可動子の可動方向に沿って配置される複数のボイスコイルを含むMM(Moving Magnet)式のボイスコイルモータであり、
前記アクチュエータドライバは、
制御信号に応じて、前記複数のボイスコイルを駆動する駆動部と、
を備え、
前記駆動部は、
前記複数のボイスコイルに対応し、それぞれが、前記可動子の位置を示す位置検出信号に応じて、前記制御信号を補正する、複数の補正部と、
前記複数のボイスコイルに対応し、それぞれが、対応する補正部の出力に応じて、対応するボイスコイルを駆動する、複数のドライバと、
を備える、アクチュエータドライバ。
続きを表示(約 530 文字)
【請求項2】
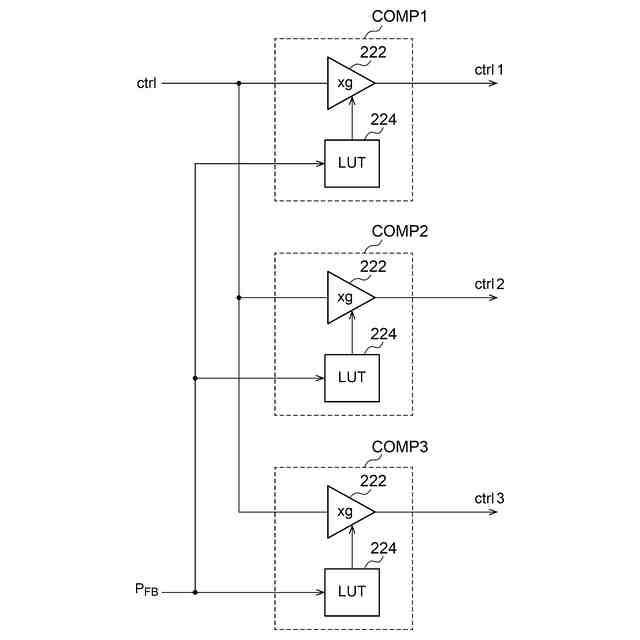
前記複数の補正部はそれぞれ、前記位置検出信号に応じた補正ゲインを生成し、前記制御信号に前記補正ゲインを乗算する、請求項1に記載のアクチュエータドライバ。
【請求項3】
前記位置検出信号が目標値に近づくように、前記制御信号を生成するサーボコントローラをさらに備える、請求項1または2に記載のアクチュエータドライバ。
【請求項4】
前記サーボコントローラは、
前記目標値と前記位置検出信号の誤差を生成する誤差検出器と、
前記誤差を受ける比例積分制御器と、
を含む、請求項3に記載のアクチュエータドライバ。
【請求項5】
ひとつの半導体基板に一体集積化される、請求項1または2に記載のアクチュエータドライバ。
【請求項6】
イメージセンサと、
前記イメージセンサへの入射光路上に設けられた手ブレ補正機構と、
前記手ブレ補正機構の可動部を位置決めするアクチュエータと、
請求項1または2に記載のアクチュエータドライバと、
を備える、カメラモジュール。
【請求項7】
請求項6に記載のカメラモジュールを備える、電子機器。
発明の詳細な説明
【技術分野】
【0001】
本開示は、アクチュエータドライバおよびこれを用いたカメラモジュールに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
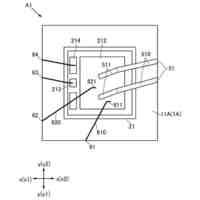
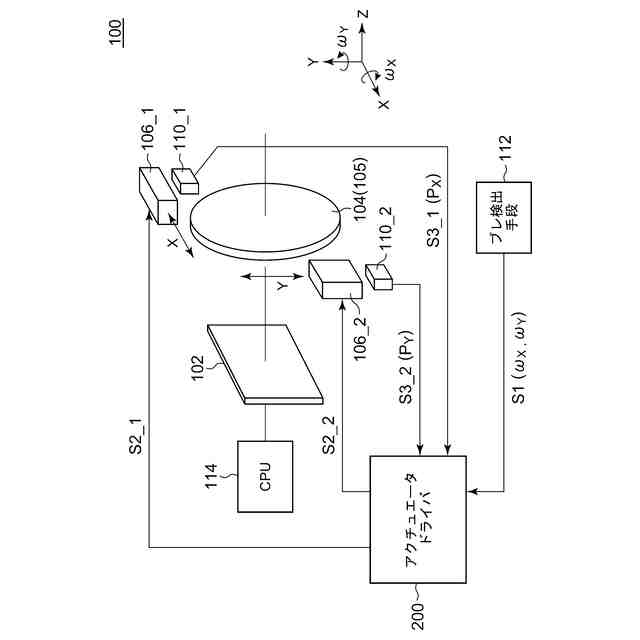
近年、スマートフォンなどの電子機器に搭載されるカメラモジュールに、光学手ぶれ補正(OIS:Optical Image Stabilizer)の採用が進められている。光学手ぶれ補正付きのカメラモジュールは、イメージセンサ、イメージセンサの撮像面と平行なXY平面内で移動可能なレンズ(手ブレ補正用レンズと称する)、レンズを位置決めするアクチュエータ、アクチュエータを制御するアクチュエータドライバを備える。ジャイロセンサなどのブレ検出手段によってブレが検出されると、アクチュエータドライバは、ブレが相殺されるようにアクチュエータを駆動し、レンズをシフトさせる。
【先行技術文献】
【特許文献】
【0003】
特開2018-138984号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
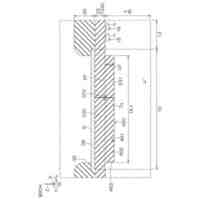
MM(Moving Magnet)式のボイスコイルモータにおいて、ストローク長を長くするために、磁石を有する可動子の可動方向に沿って、複数のボイスコイルが配置される。
【0005】
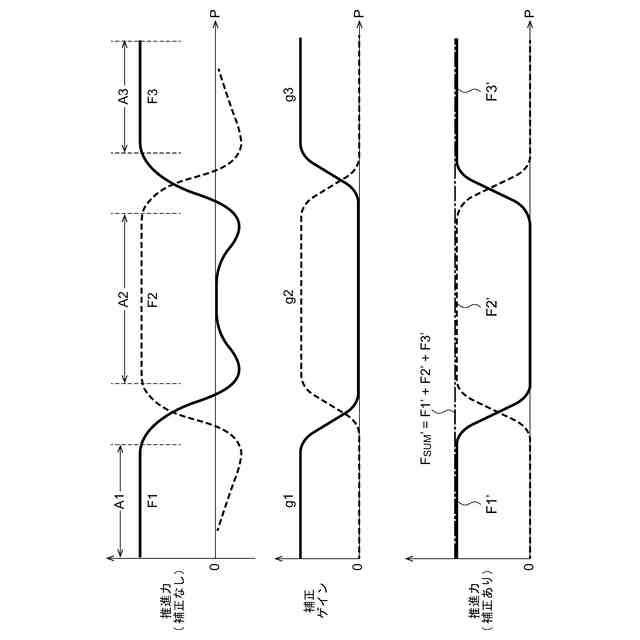
ストローク長が長いアクチュエータにおいては、同じ量の駆動電流を供給したときに、ひとつのボイスコイルが発生する推進力の大きさ、あるいはその方向は、可動子の位置によって変化する。アクチュエータの推進力は、複数のボイスコイルが発生する推進力の総和であるため、可動子の位置によって推進力が変動することとなる。
【0006】
本開示は係る状況においてなされたものであり、その例示的な目的のひとつは、推進力の位置依存性を低減したアクチュエータドライバの提供にある。
【課題を解決するための手段】
【0007】
本開示のある態様は、可動部を位置決めするアクチュエータを駆動するアクチュエータドライバに関する。アクチュエータは、磁石を含む可動子と、可動子の可動方向に沿って配置される複数のボイスコイルを含むMM(Moving Magnet)式のボイスコイルモータである。アクチュエータドライバは、制御信号に応じて、複数のボイスコイルを駆動する駆動部と、を備える。駆動部は、複数のボイスコイルに対応し、それぞれが、可動子の位置を示す位置検出信号に応じて、制御信号を補正する、複数の補正部と、複数のボイスコイルに対応し、それぞれが、対応する補正部の出力に応じて、対応するボイスコイルを駆動する複数のドライバと、を備える。
【0008】
なお、以上の構成要素を任意に組み合わせたもの、構成要素や表現を、方法、装置、システムなどの間で相互に置換したものもまた、本発明あるいは本開示の態様として有効である。さらに、この項目(課題を解決するための手段)の記載は、本発明の欠くべからざるすべての特徴を説明するものではなく、したがって、記載されるこれらの特徴のサブコンビネーションも、本発明たり得る。
【発明の効果】
【0009】
本開示によれば、長いストローク長を有するアクチュエータとの組み合わせにおいて、可動部の位置を検出できる。
【図面の簡単な説明】
【0010】
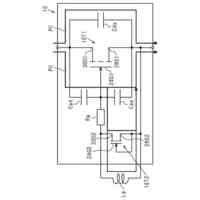
図1は、手振れ補正機能を備えるカメラモジュールのブロック図である。
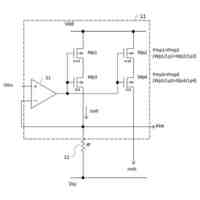
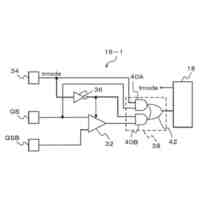
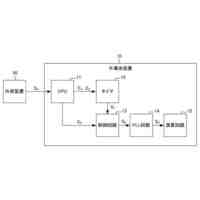
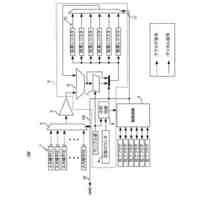
図2は、アクチュエータドライバのブロック図である。
図3は、実施形態に係るアクチュエータドライバのブロック図である。
図4は、複数のボイスコイルそれぞれが発生する推進力を示す図である。
図5は、駆動部による推進力の補正を説明する図である。
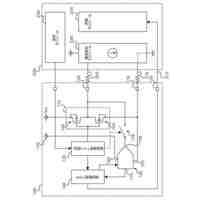
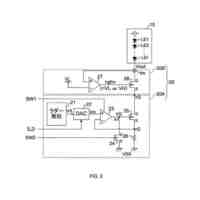
図6は、補正部の構成例を示すブロック図である。
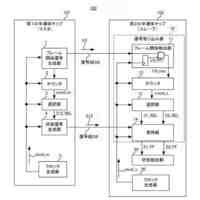
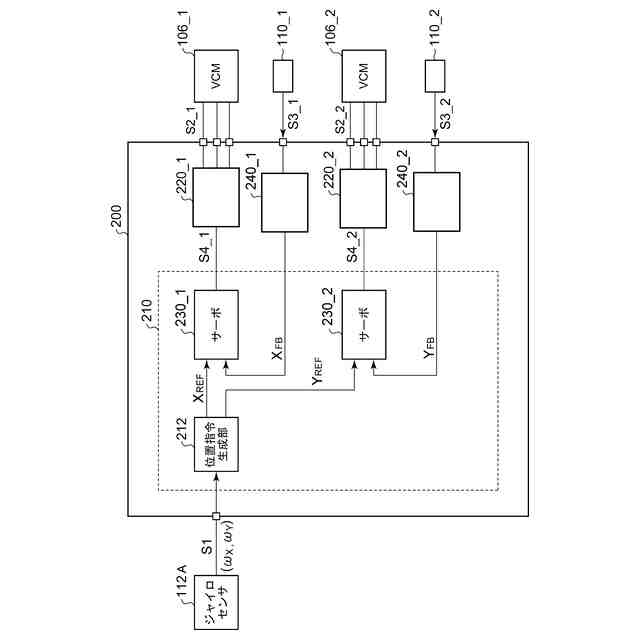
図7は、変形例1に係るアクチュエータドライバのブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ローム株式会社
回路装置
19日前
ローム株式会社
電子回路
19日前
ローム株式会社
発振回路
9日前
ローム株式会社
半導体装置
17日前
ローム株式会社
半導体装置
13日前
ローム株式会社
スナバ回路
19日前
ローム株式会社
圧電共振器
6日前
ローム株式会社
入出力回路
6日前
ローム株式会社
基準電圧源
6日前
ローム株式会社
照度センサ
11日前
ローム株式会社
半導体装置
5日前
ローム株式会社
半導体装置
11日前
ローム株式会社
半導体装置
23日前
ローム株式会社
半導体装置
20日前
ローム株式会社
半導体装置
4日前
ローム株式会社
半導体装置
16日前
ローム株式会社
半導体装置
25日前
ローム株式会社
半導体装置
16日前
ローム株式会社
半導体装置
4日前
ローム株式会社
半導体装置
4日前
ローム株式会社
半導体装置
16日前
ローム株式会社
MEMSセンサ
5日前
ローム株式会社
半導体集積回路
25日前
ローム株式会社
電圧制御発振器
5日前
ローム株式会社
窒化物半導体装置
16日前
ローム株式会社
半導体パッケージ
19日前
ローム株式会社
クロック生成回路
20日前
ローム株式会社
窒化物半導体装置
9日前
ローム株式会社
窒化物半導体装置
3日前
ローム株式会社
半導体集積回路装置
16日前
ローム株式会社
半導体集積回路装置
3日前
ローム株式会社
表示ドライバ及び表示装置
19日前
ローム株式会社
アナログデジタル変換装置
3日前
ローム株式会社
絶縁チップおよび半導体装置
18日前
ローム株式会社
LEDドライバ及び表示装置
19日前
ローム株式会社
ソースドライバ及び表示装置
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ