TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025132495
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024030114
出願日
2024-02-29
発明の名称
ロボットの異常検出方法及び異常検出装置
出願人
ニデックインスツルメンツ株式会社
代理人
個人
,
個人
主分類
B25J
19/06 20060101AFI20250903BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットにおいて、各軸のモータのトルク値と閾値である衝突検出リミット値とを単純に比較することによらずにそのロボットにおける衝突などの異常の発生を確実に検出する。
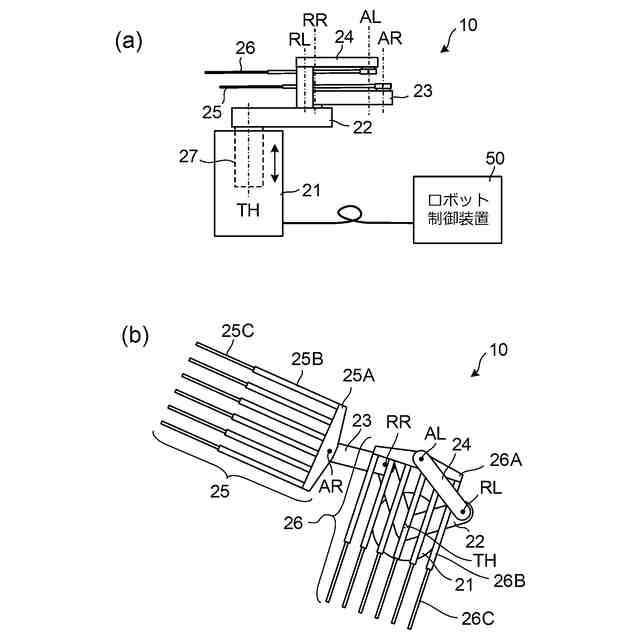
【解決手段】ロボット10における異常の発生を検出する異常検出装置は、モータ11の速度が低いほど小さくモータ11の速度が大きいほど大きくなるようにモータ11の速度に応じて規定される閾値を生成する閾値生成部53と、モータ11のトルク値から特定の周波数帯域に含まれる成分を抽出するフィルタ54と、フィルタ54によって抽出された成分の強度を算出する強度算出部55と、強度算出部55で算出された強度と閾値生成部53で生成された閾値とを比較し、強度が閾値を上回ったときに異常が発生したと判定する比較部56と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
各軸がモータによって駆動されるロボットにおける異常の発生を検出する異常検出方法であって、
前記モータの速度が低いほど小さく前記モータの速度が大きいほど大きくなるように前記モータの速度に応じて定められる閾値を定め、
前記モータのトルク値から特定の周波数帯域に含まれる成分を抽出し、抽出された前記成分の強度を算出し、前記強度が前記閾値を上回ったときに前記異常が発生したと判定する、異常検出方法。
続きを表示(約 1,000 文字)
【請求項2】
速度ゼロから前記モータの最大速度までの範囲が複数の速度領域に区分され、前記速度領域ごとに前記閾値が単一の値として定められている、請求項1に記載の異常検出方法。
【請求項3】
前記特定の周波数帯域は、衝突により前記ロボットに発生する振動の周波数を含む周波数帯域である、請求項1または2に記載の異常検出方法。
【請求項4】
前記特定の周波数帯域は、前記ロボットに含まれる減速機の異常によって前記ロボットに発生する振動の周波数を含む周波数帯域である、請求項1または2に記載の異常検出方法。
【請求項5】
前記強度は、前記特定の周波数成分の二乗平均平方根値である、請求項1または2に記載の異常検出方法。
【請求項6】
前記ロボットは複数の軸を備えており、前記複数の軸の各々ごとに前記特定の周波数成分と前記閾値とが規定されて当該軸のトルク値に基づいて前記異常が発生したかを判定する、請求項1または2に記載の異常検出方法。
【請求項7】
各軸がモータによって駆動されるロボットにおける異常の発生を検出する異常検出装置であって、
前記モータの速度が低いほど小さく前記モータの速度が大きいほど大きくなるように前記モータの速度に応じて規定される閾値を生成する閾値生成部と、
前記モータのトルク値から特定の周波数帯域に含まれる成分を抽出するフィルタと、
前記フィルタによって抽出された前記成分の強度を算出する強度算出部と、
前記強度と前記閾値とを比較し、前記強度が前記閾値を上回ったときに前記異常が発生したと判定する比較部と、
を有する異常検出装置。
【請求項8】
速度ゼロから前記モータの最大速度までの範囲が複数の速度領域に区分され、前記閾値は前記速度領域ごとに単一の値として定められ、
前記閾値生成部は、前記速度領域ごとの前記閾値を格納したルックアップテーブルを備える、請求項7に記載の異常検出装置。
【請求項9】
前記特定の周波数帯域は、衝突により前記ロボットに発生する振動の周波数を含む周波数帯域である、請求項7または8に記載の異常検出装置。
【請求項10】
前記特定の周波数帯域は、前記ロボットに含まれる減速機の異常によって前記ロボットに発生する振動の周波数を含む周波数帯域である、請求項7または8に記載の異常検出装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットにおける衝突など異常の発生を検出する方法及び装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
ワークの搬送などに用いられるロボットは、その動作中にそのアームなどが周囲の物体と干渉して衝突することがある。動作中に衝突が起きたときは、直ちにそれを検出してロボットの動作を緊急に停止させるなどの処理を行う必要がある。ロボットにおける衝突の検出には、そのアームやアーム先端のハンドなどに取り付けられた衝突センサを用いることができる。しかしながら衝突センサを設けることは、コストの上昇をもたらす。さらに、衝突センサの質量がロボットの動特性に悪影響を及ぼすことがあり、また、ロボットの構造によっては衝突センサへの配線を設けることが困難な場合もある。
【0003】
衝突センサによらずに衝突を検出する方法として、ロボットの各軸のサーボモータにおけるトルクを監視する方法がある。衝突が起きてロボットの動きが阻害されると、対応する軸のサーボモータのトルクが急激に上昇するので、閾値との比較によりトルクの上昇を検出した場合、衝突が発生したと判断することができる。この方法では、外部からの指令に応じてロボットを正常に動作させているときであっても指令の内容によってはトルクが大きく上昇することがあるので、衝突が発生したと判定するための閾値すなわち衝突検出リミット値を適切に設定する必要がある。正常運転において発生し得るトルクよりも小さな衝突検出リミット値を設定すると、正常運転時において衝突の発生を誤検出することになる。一般にトルクはモータの速度が大きいほど大きくなるから、誤検出を防ぐためには、モータが最大速度で駆動されるときトルクよりも大きな値に衝突検出リミット値を設定する必要がある。しかしながら最大速度での駆動に必要なトルクよりも大きな値に衝突検出リミット値を設定したときは、モータの速度が小さいときに衝突の検出を的確に行うことができない、という課題を生ずる。低速であればモータのトルクも小さく、衝突や干渉があったときのトルクの上昇も小さい。したがって、最大速度に対応した衝突検出リミット値を使用したときは、程度の小さな衝突や干渉を検出できない恐れがある。あるいは、衝突や干渉がある程度進行してから初めてその衝突や干渉を検出する、すなわち検出にタイムラグが生ずるおそれがある。
【0004】
最大速度に対応した衝突検出リミット値を用いることによる課題を解決する技術として特許文献1は、モータの速度が小さいほど小さくモータの速度が大きいほど大きくなるようにモータの速度に応じた衝突検出リミット値を定め、この衝突検出リミット値とモータのトルク値とを比較して、トルク値が衝突検出リミット値を上回ったときに衝突が発生したと判定する技術を開示している。
【先行技術文献】
【特許文献】
【0005】
特開2023-122808号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載された方法は、モータの速度が小さいときに小さくなる衝突検出リミット値を用いて衝突を検出するものである。しかしながら、モータのトルク値は、正常な動作を行っているときであっても通常とは異なる挙動を示すことがあるから、ロボットに生じた衝突などの異常を検出したい場合には、トルク値と衝突検出リミット値との比較だけでは不十分となる可能性がある。特に低速域においては、正常動作中であってもトルク値が衝突検出リミット値を超えることが起こりやすい。例えば、ロボットの各軸の減速機に潤滑用のグリスを塗布した場合、塗布直後にはモータのトルク値がかえって上昇することがある。速度に応じた衝突検出リミット値を設定してモータのトルク値と衝突検出リミット値とを単純に比較するだけでは、衝突などの異常に関して低速域において誤検出が起こるおそれがある。
【0007】
本発明の目的は、モータのトルク値と閾値である衝突検出リミット値とを単純に比較することによらずにロボットにおける衝突などの異常の発生を確実に検出することができる方法及び装置を提供することにある。
【課題を解決するための手段】
【0008】
本発明の一態様の異常検出方法は、各軸がモータによって駆動されるロボットにおける異常の発生を検出する異常検出方法であって、モータの速度が低いほど小さくモータの速度が大きいほど大きくなるようにモータの速度に応じて閾値を定めることと、モータのトルク値から特定の周波数帯域に含まれる成分を抽出することと、抽出された成分の強度を算出することと、強度が閾値を上回ったときに異常が発生したと判定することと、を有する。
【0009】
本発明の一態様の異常検出装置は、各軸がモータによって駆動されるロボットにおける異常の発生を検出する異常検出装置であって、モータの速度が低いほど小さくモータの速度が大きいほど大きくなるようにモータの速度に応じて閾値を生成する閾値生成手段と、モータのトルク値から特定の周波数帯域に含まれる成分を抽出するフィルタと、フィルタによって抽出された成分の強度を算出する強度算出手段と、強度と閾値とを比較し、強度が閾値を上回ったときに異常が発生したと判定する比較手段と、を有する。
【発明の効果】
【0010】
本発明によれば、モータのトルク値と閾値である衝突検出リミット値とを単純に比較することによらずにロボットにおける衝突などの異常の発生を確実に検出することができるようになる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
23日前
個人
折りたたみ工具
6日前
株式会社ジャノメ
ロボット
2か月前
株式会社三協システム
製函機
4日前
株式会社三協システム
移載装置
3日前
CKD株式会社
把持装置
5日前
株式会社ダイヘン
搬送装置
2か月前
株式会社不二越
ロボットシステム
17日前
個人
ペグハンマおよびペグハンマ用部品
2か月前
住友重機械工業株式会社
教示装置
2か月前
株式会社不二越
ロボット操作装置
11日前
SMC株式会社
着脱装置
4日前
日本精工株式会社
締結用工具
20日前
太陽パーツ株式会社
アシストスーツ
6日前
株式会社ミクロブ
把持装置
5日前
川崎重工業株式会社
ロボット
2か月前
ARMA株式会社
ジョイントフレーム
18日前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
トヨタ自動車株式会社
カプラ接続治具
27日前
住友重機械工業株式会社
支援装置
2か月前
株式会社不二越
ロボットシステム
3日前
住友重機械工業株式会社
支援装置
2か月前
株式会社不二越
ロボットシステム
6日前
トヨタ自動車株式会社
歩行ロボット
9日前
積水ハウス株式会社
フィルム除去具
1か月前
株式会社マキタ
電気機器
2か月前
アピュアン株式会社
衝撃工具
2か月前
ホシデン株式会社
分解用治具
2か月前
ダイハツ工業株式会社
移載治具
18日前
工機ホールディングス株式会社
作業機
2か月前
大和ハウス工業株式会社
ねじ回転工具
4日前
株式会社リコー
多関節ロボット
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社不二越
協働ロボットシステム
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































