TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025135072
公報種別
公開特許公報(A)
公開日
2025-09-18
出願番号
2024032652
出願日
2024-03-05
発明の名称
学習制御装置、学習制御方法、および磁気ディスク装置
出願人
株式会社東芝
,
東芝デバイス&ストレージ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05B
13/02 20060101AFI20250910BHJP(制御;調整)
要約
【課題】制御対象の動作結果状態の目標状態に対する精度向上を図る。
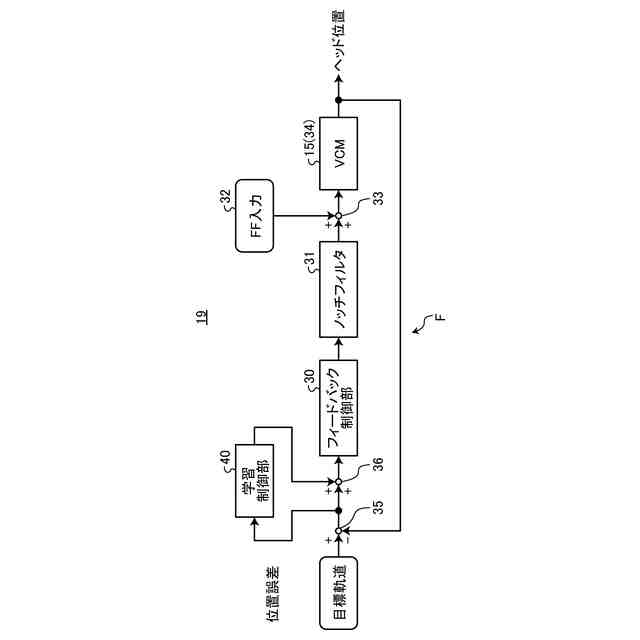
【解決手段】学習制御装置は、フィードバック制御部30と、学習制御部40と、を備える。フィードバック制御部30は、フィードバック信号に応じた入力制御信号に応じて動作する制御対象の動作結果状態と目標状態との追従誤差に応じた入力信号に基づいて、制御対象34の動作結果状態を目標状態に追従させるためのフィードバック信号を出力する。学習制御部40は、追従誤差に応じた入力信号をフィードバック制御部30へ入力させるフィードバック経路Fに、追従誤差に応じて更新した、追従誤差を0に漸近させるための学習制御入力を出力する。学習制御部40による追従誤差の評価区間の評価区間長が、学習制御部40が学習制御入力をフィードバック経路Fへ出力する出力区間の出力区間長より長い。
【選択図】図2
特許請求の範囲
【請求項1】
フィードバック信号に応じた入力制御信号に応じて動作する制御対象の動作結果状態と目標状態との追従誤差に応じた入力信号に基づいて、前記制御対象の前記動作結果状態を前記目標状態に追従させるための前記フィードバック信号を出力するフィードバック制御部と、
前記追従誤差に応じた前記入力信号を前記フィードバック制御部へ入力させるフィードバック経路に、前記追従誤差に応じて更新した、前記追従誤差を0に漸近させるための学習制御入力を出力する学習制御部と、
を備え、
前記学習制御部による前記追従誤差の評価区間の評価区間長が、前記学習制御部が前記学習制御入力を前記フィードバック経路へ出力する出力区間の出力区間長より長い、
学習制御装置。
続きを表示(約 2,100 文字)
【請求項2】
前記学習制御部は、
式(4)の最小二乗解を求める繰り返し学習を行う、
請求項1に記載の学習制御装置。
TIFF
2025135072000013.tif
18
170
[式(4)中、u
ls
は学習制御入力のベクトルを表し、P
ls
はインパルス応答列を1サンプリング時間ずつずらしながら並べた行列を表し、d
ls
は学習制御を無効とした場合の追従誤差のベクトルを表し、式(4)中式(4A)は疑似逆行列演算を表す。]
【請求項3】
前記学習制御部は、
式(5)により繰り返し学習を行う、
請求項2に記載の学習制御装置。
TIFF
2025135072000014.tif
9
170
[式(5)中、u
ls
は学習制御入力のベクトルを表し、P
ls
はインパルス応答列を1サンプリング時間ずつずらしながら並べた行列を表し、e
ls
は位置誤差のベクトルを表す。また、式(5)中、jは学習の繰り返し回数を表し、βは学習ゲインを表す。]
【請求項4】
前記学習制御部は、
式(7)により繰り返し学習を行う、
請求項3に記載の学習制御装置。
TIFF
2025135072000015.tif
72
170
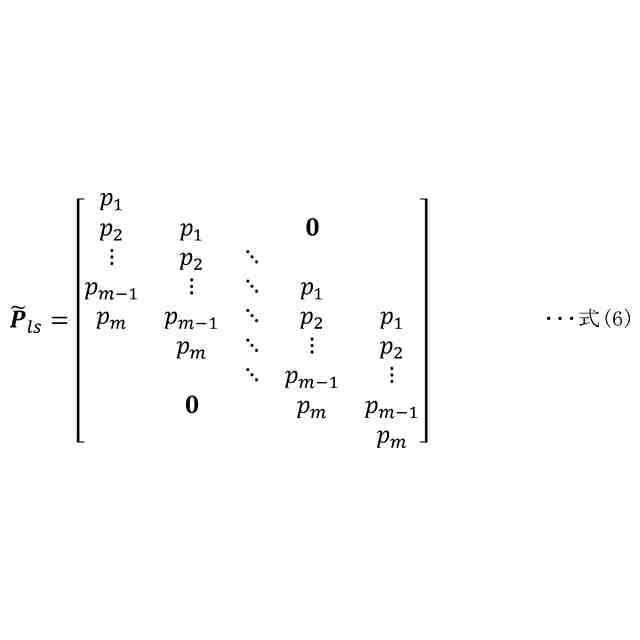
[式(6)中の左辺である式(6A)は、式(5)中のP
ls
の近似行列を表す。式(6)中、p
1
~p
m
はm個のインパルス応答列を表す。式(7)中、u
ls
は学習制御入力のベクトルを表し、e
ls
は位置誤差のベクトルを表す。式(7)中、jは学習の繰り返し回数を表し、βは学習ゲインを表す。式(7)中の式(6A)は、式(6)を表す。]
【請求項5】
前記学習制御部は、
前記フィードバック経路から順次サンプリングする前記追従誤差を式(8)によって表されるフィルタへ入力し、該フィルタから出力された前記追従誤差を用いて前記学習制御入力を更新する、
請求項4に記載の学習制御装置。
TIFF
2025135072000016.tif
7
170
[式(8)中、F(z)はフィルタを表し、zは遅延演算子を表し、p
1
~p
m
はm個のインパルス応答列を表す。]
【請求項6】
前記評価区間と前記出力区間の一部が重複する、
請求項1に記載の学習制御装置。
【請求項7】
前記評価区間の開始タイミングは前記出力区間の開始タイミングと同じタイミングであり、
前記評価区間の終了タイミングは前記出力区間の終了タイミングより後のタイミングであり、
請求項1に記載の学習制御装置。
【請求項8】
前記制御対象は磁気ヘッドであり、
前記動作結果状態は前記磁気ヘッドの磁気ディスク上のヘッド位置であり、
前記目標状態は前記磁気ヘッドの目標軌道であり、
前記追従誤差は位置誤差である、
請求項1に記載の学習制御装置。
【請求項9】
学習制御装置により実行される学習制御方法であって、
フィードバック信号に応じた入力制御信号に応じて動作する制御対象の動作結果状態と目標状態との追従誤差に応じた入力信号に基づいて、前記制御対象の前記動作結果状態を前記目標状態に追従させるための前記フィードバック信号を出力する出力ステップと、
前記追従誤差に応じた前記入力信号を前記出力ステップへ入力させるフィードバック経路に、前記追従誤差に応じて更新した、前記追従誤差を0に漸近させるための学習制御入力を出力する学習制御ステップと、
を含み、
前記学習制御ステップによる前記追従誤差の評価区間の評価区間長が、前記学習制御ステップが前記学習制御入力を前記フィードバック経路へ出力する出力区間の出力区間長より長い、
学習制御方法。
【請求項10】
フィードバック信号に応じた入力制御信号に応じてヘッド位置が移動する磁気ヘッドの磁気ディスク上の目標軌道に対する前記ヘッド位置の位置誤差に応じた入力信号に基づいて、前記ヘッド位置を前記目標軌道に追従させるための前記フィードバック信号を出力するフィードバック制御部と、
前記位置誤差に応じた前記入力信号を前記フィードバック制御部へ入力させるフィードバック経路に、前記位置誤差に応じて更新した、前記位置誤差を0に漸近させるための学習制御入力を出力する学習制御部と、
を備え、
前記学習制御部による前記位置誤差の評価区間の評価区間長が、前記学習制御部が前記学習制御入力を前記フィードバック経路へ出力する出力区間の出力区間長より長い、
磁気ディスク装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、学習制御装置、学習制御方法、および磁気ディスク装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
デジタル制御装置として、学習メモリに格納された学習制御入力に従って制御対象を繰り返し制御するとともに、目標値と制御対象の出力値との追従誤差を用いて次回の繰り返し学習に用いる学習制御入力を順次更新し、制御性能を向上させる学習制御装置が知られている。
【0003】
しかしながら従来技術では、学習制御により更新された学習制御入力や目標値がフィードバック経路に印加されている期間には追従誤差が抑制され制御対象の動作結果状態の精度が改善するものの、学習制御が終了した瞬間に過渡応答が生じ、制御対象の動作結果状態の目標状態に対する精度が劣化する場合があった。
【先行技術文献】
【非特許文献】
【0004】
J. Ishikawa, et al, “A Robust Stability Analysis on Learning Control for Hard Disk Drives”, Advances in Information Storage Systems, pp.49-61 (1999)
Benjamin T. Fine, et al, “Model Inverse Based Iterative Learning Control Using Finite Impulse Response Approximations”, 2009 American Control Conference, pp.931-936
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、制御対象の動作結果状態の目標状態に対する精度向上を図ることができる、学習制御装置、学習制御方法、および磁気ディスク装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
実施形態の学習制御装置は、フィードバック制御部と、学習制御部と、を備える。フィードバック制御部は、フィードバック信号に応じた入力制御信号に応じて動作する制御対象の動作結果状態と目標状態との追従誤差に応じた入力信号に基づいて、前記制御対象の前記動作結果状態を前記目標状態に追従させるための前記フィードバック信号を出力する。学習制御部は、前記追従誤差に応じた前記入力信号を前記フィードバック制御部へ入力させるフィードバック経路に、前記追従誤差に応じて更新した、前記追従誤差を0に漸近させるための学習制御入力を出力する。前記学習制御部による前記追従誤差の評価区間の評価区間長が、前記学習制御部が前記学習制御入力を前記フィードバック経路へ出力する出力区間の出力区間長より長い。
【図面の簡単な説明】
【0007】
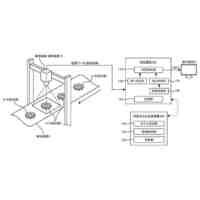
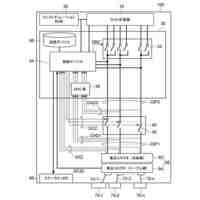
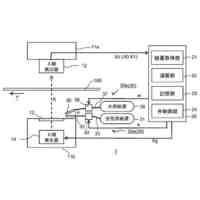
HDDの主要部の構成のブロック図。
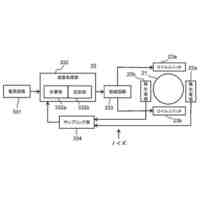
シーク制御部の構成例のブロック図。
従来の学習制御の説明図。
シーク制御部の模式図。
従来の学習制御の説明図。
従来の学習制御の説明図。
従来技術の評価区間長と出力区間長との関係の模式図。
本実施形態の評価区間長と出力区間長との関係の模式図。
学制御の説明図。
インパルス応答を表す図。
FIRフィルタの説明図。
学習制御部の模式図。
数値シミュレーションの結果の説明図。
数値シミュレーションの結果の説明図。
数値シミュレーションの結果の説明図。
数値シミュレーションの結果の説明図。
数値シミュレーションの結果の説明図。
数値シミュレーションの結果の説明図。
数値シミュレーションの結果の説明図。
【発明を実施するための形態】
【0008】
以下に添付図面を参照して、この発明にかかる学習制御装置、学習制御方法、および磁気ディスク装置の実施形態を詳細に説明する。
【0009】
図1は、本実施形態のHDD(ハードディスクドライブ)10の主要部の構成の一例を示すブロック図である。HDD10は、磁気ディスク装置および学習制御装置の一例である。
【0010】
ホスト20は、HDD10を記憶装置として使用する機器である。ホスト20は、ホストインタフェースIFによってHDD10に接続される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社東芝
センサ
1か月前
株式会社東芝
固定子
1か月前
株式会社東芝
センサ
1か月前
株式会社東芝
センサ
3日前
株式会社東芝
センサ
3日前
株式会社東芝
遮断装置
2か月前
株式会社東芝
判定装置
3か月前
株式会社東芝
回路素子
1か月前
株式会社東芝
ドア構造
1か月前
株式会社東芝
回転電機
3か月前
株式会社東芝
燃料電池
2か月前
株式会社東芝
電子機器
3か月前
株式会社東芝
配線治具
2か月前
株式会社東芝
搬送装置
3か月前
株式会社東芝
金型構造
3日前
株式会社東芝
半導体装置
今日
株式会社東芝
半導体装置
今日
株式会社東芝
半導体装置
今日
株式会社東芝
半導体装置
今日
株式会社東芝
主幹制御器
2か月前
株式会社東芝
半導体装置
10日前
株式会社東芝
半導体装置
3か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
X線厚み計
2か月前
株式会社東芝
電磁流量計
2か月前
株式会社東芝
半導体装置
3か月前
株式会社東芝
半導体装置
今日
株式会社東芝
ラック装置
1か月前
株式会社東芝
半導体装置
今日
株式会社東芝
電動送風機
1か月前
株式会社東芝
半導体装置
12日前
株式会社東芝
半導体装置
今日
株式会社東芝
異常検出装置
1か月前
株式会社東芝
走行システム
18日前
株式会社東芝
アンテナ装置
2か月前
株式会社東芝
操作盤カバー
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ