TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025138124
公報種別
公開特許公報(A)
公開日
2025-09-25
出願番号
2024037019
出願日
2024-03-11
発明の名称
制御装置、制御方法及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H04N
23/695 20230101AFI20250917BHJP(電気通信技術)
要約
【課題】 共振を防ぎながらパン・チルト駆動部が目標位置に同時に到達できる。
【解決手段】 パン駆動手段がパン目標位置まで駆動する際の駆動時間とチルト駆動手段がチルト目標位置まで駆動する際の駆動時間が同じになるようにパン制御速度とチルト制御速度を算出する算出手段と、を有し、算出手段は、算出されたパン制御速度またはチルト制御速度のうち少なくとも一方が、撮像手段の機構的な共振に基づいて規定される規定速度の範囲に含まれる場合、パン駆動手段がパン目標位置まで駆動する際の駆動時間とチルト駆動手段がチルト目標位置まで駆動する際の駆動時間が同じになるようパン制御速度ならびにチルト制御速度を補正する、ことを特徴とする制御装置。
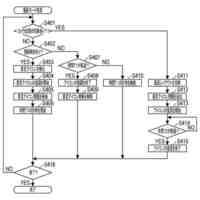
【選択図】 図3
特許請求の範囲
【請求項1】
撮像手段の撮像方向をパン方向に変化させるパン駆動手段と、チルト方向に変化させるチルト駆動手段を制御する制御装置であって、
前記パン駆動手段がパン目標位置まで駆動する際の駆動時間と前記チルト駆動手段がチルト目標位置まで駆動する際の駆動時間が同じになるようにパン制御速度とチルト制御速度を算出する算出手段と、
前記パン制御速度で前記パン駆動手段を駆動するよう制御し、前記チルト制御速度で前記チルト駆動手段を駆動するよう制御する制御手段と、
を有し、
前記算出手段は、算出された前記パン制御速度または前記チルト制御速度のうち少なくとも一方が、前記撮像手段の機構的な共振に基づいて規定される規定速度の範囲に含まれる場合、前記パン駆動手段が前記パン目標位置まで駆動する際の駆動時間と前記チルト駆動手段が前記チルト目標位置まで駆動する際の駆動時間が同じになるよう前記パン制御速度ならびに前記チルト制御速度を補正する、
ことを特徴とする制御装置。
続きを表示(約 1,900 文字)
【請求項2】
前記算出手段は所定の速度パラメータに基づいて前記パン制御速度ならびに前記チルト制御速度を算出する、
ことを特徴とする請求項1に記載の制御装置。
【請求項3】
前記制御手段は、前記パン制御速度と前記チルト制御速度のいずれか1つが前記規定速度の範囲に含まれるか判定する判定手段と、
をさらに有し、
前記判定手段が前記パン制御速度と前記チルト制御速度のいずれか1つが前記規定速度の範囲に含まれると判定した場合、前記補正手段は前記判定手段の判定に基づいて前記パン制御速度と前記チルト制御速度の少なくともいずれか1つを補正する、
ことを特徴とする請求項1に記載の制御装置。
【請求項4】
前記チルト駆動手段の前記チルト目標位置までの駆動角度が前記パン駆動手段の前記パン目標位置までの駆動角度よりも大きい場合であって、
前記判定手段によって前記パン制御速度が前記規定速度の範囲に含まれると判定される場合、
前記算出手段は、前記パン制御速度と前記パン制御速度を補正したパン補正速度の比率に基づいて前記チルト制御速度を算出し、
前記チルト駆動手段の前記チルト目標位置までの駆動角度が前記パン駆動手段の前記パン目標位置までの駆動角度よりも大きくない場合であって、
前記判定手段によって前記チルト制御速度が前記規定速度の範囲に含まれると判定される場合、
前記算出手段は、前記チルト制御速度と前記チルト制御速度を補正したチルト補正速度の比率に基づいて前記パン制御速度を算出する、
ことを特徴とする請求項2ならびに請求項3に記載の制御装置。
【請求項5】
前記撮像手段は、更に、レンズの駆動を行うレンズ駆動手段を有し、
前記算出手段は前記パン駆動手段と前記チルト駆動手段ならびに前記レンズ駆動手段がそれぞれ前記パン目標位置、前記チルト目標位置、レンズ目標位置まで駆動する際の駆動時間が同じになるよう前記パン制御速度と前記チルト制御速度ならびにレンズ制御速度を算出する算出手段と、
を有することを特徴とする請求項1に記載の制御装置。
【請求項6】
前記撮像手段は、更に、レンズの駆動を行うレンズ駆動手段を有し、
前記算出手段は前記パン駆動手段と前記チルト駆動手段ならびに前記レンズ駆動手段がそれぞれ前記パン目標位置、前記チルト目標位置、レンズ目標位置まで駆動する際の駆動時間が同じになるよう前記パン制御速度と前記チルト制御速度ならびにレンズ制御速度を算出する算出手段と、
前記補正手段が、前記パン制御速度または前記チルト制御速度の少なくともいずれか1つを補正する場合、
前記算出手段は、前記パン制御速度と前記パン補正速度の比率または、前記チルト制御速度と前記チルト補正速度の比率に基づいて前記レンズ制御速度を算出する、
ことを特徴とする、請求項4に記載の制御装置。
【請求項7】
前記速度パラメータはさらに前記パン駆動手段が前記パン目標位置まで駆動する駆動時間または前記チルト駆動手段が前記チルト目標位置まで駆動する駆動時間に関する情報を含む、
ことを特徴とする請求項2に記載の制御装置。
【請求項8】
撮像手段の撮像方向をパン方向に変化させるパン駆動手段と、チルト方向に変化させるチルト駆動手段を制御する制御方法であって、
前記パン駆動手段がパン目標位置まで駆動する際の駆動時間と前記チルト駆動手段がチルト目標位置まで駆動する際の駆動時間が同じになるようにパン制御速度とチルト制御速度を算出する算出工程と、
前記パン制御速度で前記パン駆動手段を駆動するよう制御し、前記チルト制御速度で前記チルト駆動手段を駆動するよう制御する制御工程と、
を有し、
前記算出工程において、算出された前記パン制御速度または前記チルト制御速度のうち少なくとも一方が、前記撮像手段の機構的な共振に基づいて規定される規定速度の範囲に含まれる場合、前記パン駆動手段が前記パン目標位置まで駆動する際の駆動時間と前記チルト駆動手段が前記チルト目標位置まで駆動する際の駆動時間が同じになるよう前記パン制御速度ならびに前記チルト制御速度を補正する、
ことを特徴とする制御方法。
【請求項9】
コンピュータを請求項1ないし7のいずれか1項に記載の制御装置の各手段として機能させるためのコンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、パン・チルト制御可能なカメラに対しての制御技術に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、映像制作の現場では、パン・チルト駆動部が制御可能なカメラに対してパン・チルト駆動部の制御を行い、カメラの撮像方向を変えながら撮影を行うシステムが普及している。そのようなカメラの中には、パン・チルト駆動部を目標位置に駆動させる際に、パン・チルト駆動部が同時に目標位置に到達するよう、パン制御速度ならびにチルト制御速度をそれぞれ算出し制御するものがある。
【0003】
一方で、パン・チルト駆動部が制御可能なカメラにおいては、所定の制御速度で駆動するよう制御する際に、パン・チルト駆動部のメカ特性によって共振による振動が発生することがある(以下、共振が発生する所定の速度のことを共振速度と呼ぶ)。このとき、パン・チルト駆動部が同時に目標位置に到達するよう制御速度を算出すると、該制御速度が共振速度の範囲に含まれる場合、共振による振動が発生してしまうことがある。
【0004】
特許文献1では、パン・チルト駆動部の各駆動量のうち駆動量が小さい、且つ、制御速度が共振領域内である場合に、該制御速度を共振領域外に設定することで共振を防ぐ方法が開示されている。
【先行技術文献】
【特許文献】
【0005】
特許第3726826号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述の特許文献に開示された従来技術では、パン・チルトのどちらか一方の制御速度を共振領域外に設定するため、パン・チルト駆動部が同時に目標位置に到達するように制御できない。
【0007】
そこで本発明の目的は、共振を防ぎながらパン・チルト駆動部が目標位置に同時に到達する制御装置を提供することである。
【課題を解決するための手段】
【0008】
上記目的を達するために本発明の一側面としての撮像装置は、以下の構成を有する。前記パン駆動手段がパン目標位置まで駆動する際の駆動時間と前記チルト駆動手段がチルト目標位置まで駆動する際の駆動時間が同じになるようにパン制御速度とチルト制御速度を算出する算出手段と、前記パン制御速度で前記パン駆動手段を駆動するよう制御し、前記チルト制御速度で前記チルト駆動手段を駆動するよう制御する制御手段と、を有し、前記算出手段は、算出された前記パン制御速度または前記チルト制御速度のうち少なくとも一方が、前記撮像手段の機構的な共振に基づいて規定される規定速度の範囲に含まれる場合、前記パン駆動手段が前記パン目標位置まで駆動する際の駆動時間と前記チルト駆動手段が前記チルト目標位置まで駆動する際の駆動時間が同じになるよう前記パン制御速度ならびに前記チルト制御速度を補正する、ことを特徴とする制御装置。
【発明の効果】
【0009】
本発明によれば、共振を防ぎながらパン・チルト駆動部が目標位置に同時に到達できる。
【図面の簡単な説明】
【0010】
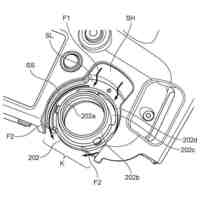
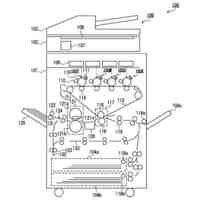
第1の実施形態に係るシステム構成図
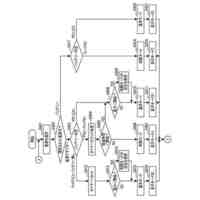
第1の実施形態に係るブロック構成図
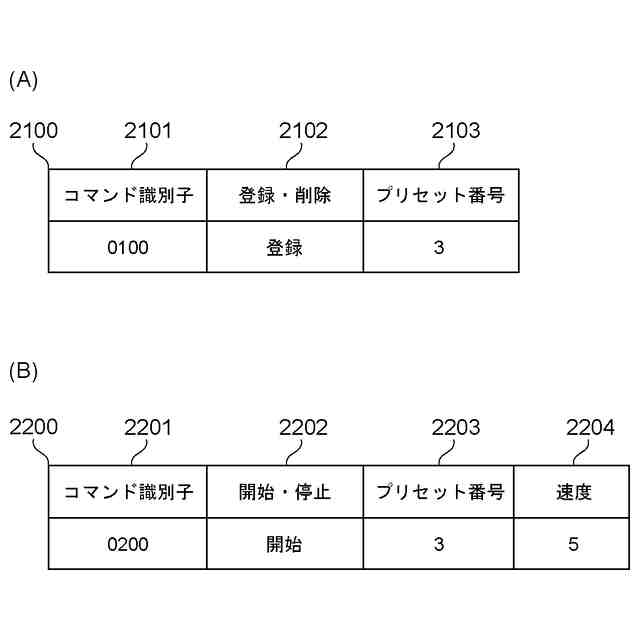
(A)は第1の実施形態に係るプリセット位置の登録を示す制御コマンド(B)は第1の実施形態に係るプリセット移動を示す制御コマンド
(A)は第1の実施形態に係るパン方向に駆動する撮像装置のイメージ図、(B)はチルト方向に駆動する撮像装置のイメージ図
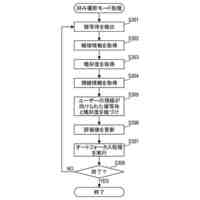
プリセット移動をする際の基本的な制御速度算出処理を示すフローチャート
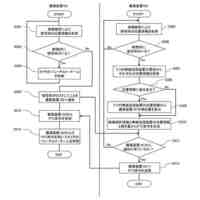
第1の実施形態に係るプリセット移動をする際の制御速度算出処理を示すフローチャート
(A)は第2の実施形態に係るプリセット移動をする際の制御速度算出処理を示すフローチャート(B)はレンズ駆動時間がパン・チルト駆動時間より長い場合のパン・チルト・レンズ制御速度の算出処理を示すフローチャート
第3の実施形態に係るプリセット移動をする際の制御速度算出処理を示すフローチャート
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キヤノン株式会社
トナー
25日前
キヤノン株式会社
電子機器
1か月前
キヤノン株式会社
撮像装置
19日前
キヤノン株式会社
電子機器
2日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
発光装置
1か月前
キヤノン株式会社
光学機器
1か月前
キヤノン株式会社
電子機器
22日前
キヤノン株式会社
撮像装置
22日前
キヤノン株式会社
電子機器
19日前
キヤノン株式会社
電子機器
17日前
キヤノン株式会社
現像装置
25日前
キヤノン株式会社
定着装置
8日前
キヤノン株式会社
定着装置
17日前
キヤノン株式会社
定着装置
17日前
キヤノン株式会社
定着装置
17日前
キヤノン株式会社
撮像装置
10日前
キヤノン株式会社
電子機器
10日前
キヤノン株式会社
記録装置
10日前
キヤノン株式会社
撮像装置
9日前
キヤノン株式会社
記録装置
9日前
キヤノン株式会社
電子機器
2日前
キヤノン株式会社
光学装置
22日前
キヤノン株式会社
電子機器
25日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
発光装置
1日前
キヤノン株式会社
表示装置
1日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
8日前
キヤノン株式会社
収容装置
2日前
キヤノン株式会社
定着装置
2日前
キヤノン株式会社
容器構造体
1か月前
キヤノン株式会社
容器構造体
1か月前
キヤノン株式会社
撮像システム
10日前
キヤノン株式会社
画像形成装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ