TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025139214
公報種別
公開特許公報(A)
公開日
2025-09-26
出願番号
2024038027
出願日
2024-03-12
発明の名称
制御装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
G01C
21/28 20060101AFI20250918BHJP(測定;試験)
要約
【課題】自己位置の推定結果に位置ずれが発生していることを判定することができる制御装置を提供すること。
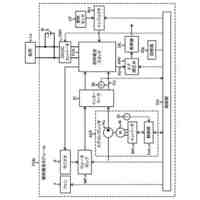
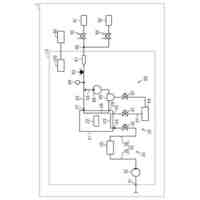
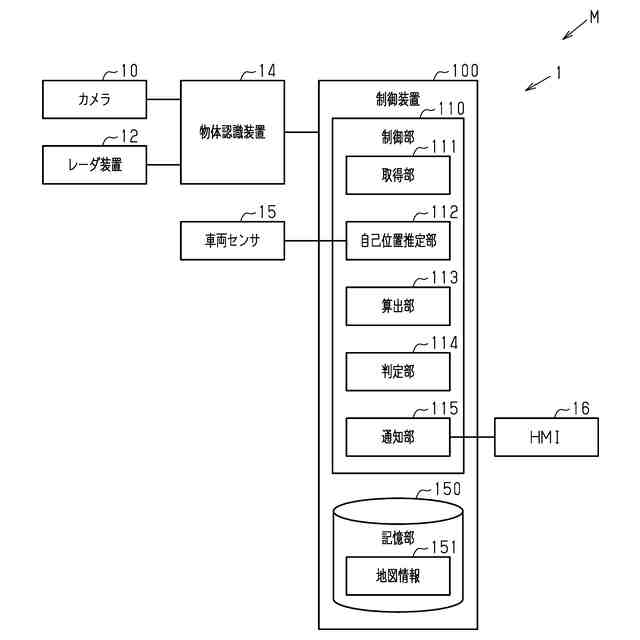
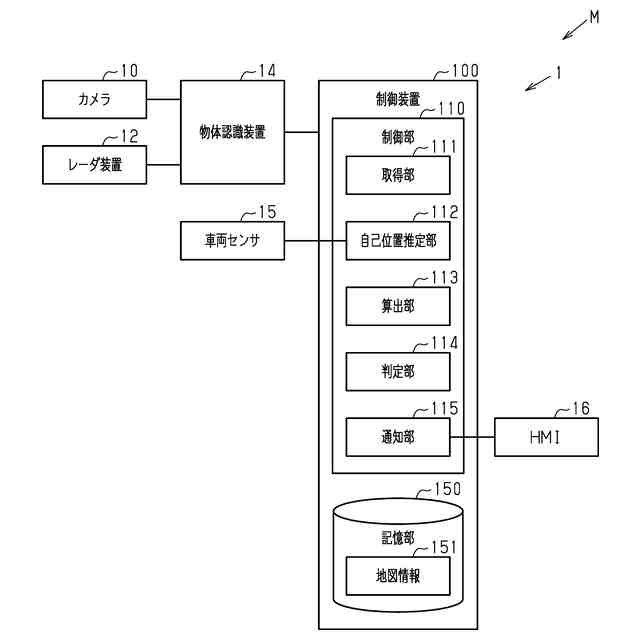
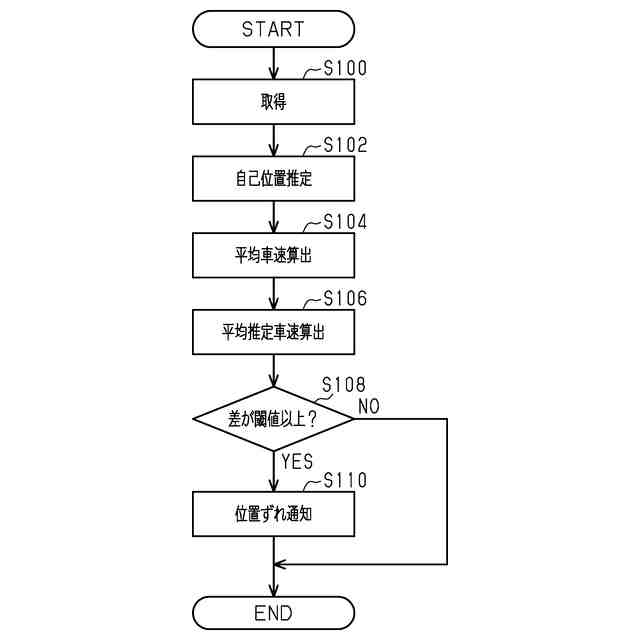
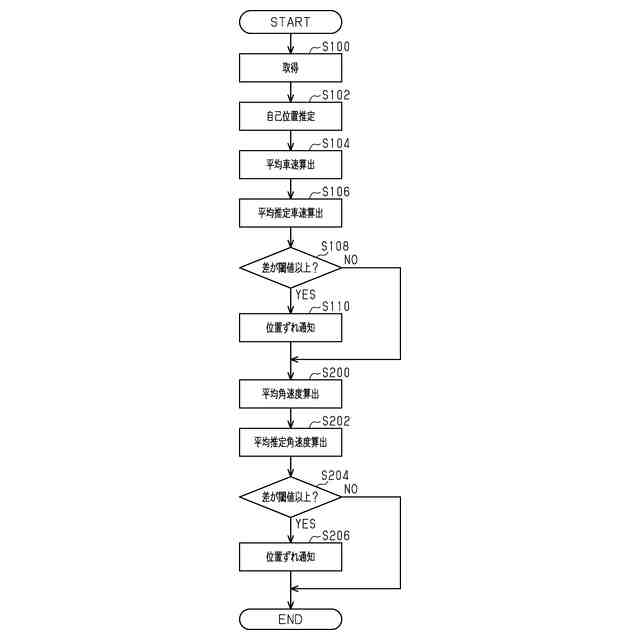
【解決手段】制御装置100は、取得部111と、自己位置推定部112と、算出部113と、判定部114とを備える。取得部111は、車両センサ15から車両Mの速度を示す情報を取得する。自己位置推定部112は、車両Mの周囲を認識する物体認識装置14の認識結果に基づいて、車両Mの自己位置を推定する。算出部113は、取得された車両Mの速度に基づいて、所定期間内における車両Mの平均車速を算出する。また、算出部113は、自己位置推定部112によって推定された車両Mの自己位置の推定結果に基づいて、所定期間内における車両Mの平均車速としての平均推定速度を算出する。判定部114は、平均車速と、平均推定車速との差が、閾値以上である場合、自己位置推定部112による自己位置の推定結果に位置ずれが発生していると判定する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の速度を示す情報を取得する取得部と、
前記移動体の周囲を認識する認識部の認識結果に基づいて、前記移動体の自己位置を推定する自己位置推定部と、
取得された前記移動体の速度に基づいて、前記所定期間内における前記移動体の平均速度を算出する、及び前記自己位置の推定結果に基づいて、前記所定期間内における前記移動体の平均速度としての平均推定速度を算出する算出部と、
前記平均速度と、前記平均推定速度との差が、閾値以上である場合、位置ずれが発生していると判定する判定部と、
を備える制御装置。
続きを表示(約 450 文字)
【請求項2】
前記取得部は、前記移動体の車速を検出する車速センサの検出結果を、前記移動体の速度を示す情報として取得し、
前記算出部は、前記平均速度として、前記移動体の平均車速を算出する、
請求項1に記載の制御装置。
【請求項3】
前記取得部は、前記移動体の角速度を検出する角速度センサの検出結果を、前記移動体の速度を示す情報として取得し、
前記算出部は、前記平均速度として、前記移動体の平均角速度を算出する、
請求項1に記載の制御装置。
【請求項4】
前記算出部は、前記所定期間内において、直前に前記移動体の速度が取得されたタイミングから所定時間だけ前までの間に取得された前記移動体の速度に基づいて、前記平均速度を算出する、及び前記所定期間内において、最後に前記自己位置が推定されたタイミングから前記所定時間だけ前までの間に推定された前記自己位置に基づいて、前記平均推定速度を算出する、
請求項1に記載の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、車両等の移動体に設けられた撮像部によって撮像、及び生成された画像に基づいて、移動体の自己位置を推定する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2009-074861号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示の方法では、移動体がトンネル等の特徴量の変化が少ない場所を走行している場合、精度良く自己位置を推定することが困難である場合があった。また、自己位置を精度良く検出できず、推定結果に位置ずれが発生していることを判定することが新たに求められていた。
【課題を解決するための手段】
【0005】
上記目的を達成する制御装置は、移動体の速度を示す情報を取得する取得部と、前記移動体の周囲を認識する認識部の認識結果に基づいて、前記移動体の自己位置を推定する自己位置推定部と、取得された前記移動体の速度に基づいて、前記所定期間内における前記移動体の平均速度を算出する、及び前記自己位置の推定結果に基づいて、前記所定期間内における前記移動体の平均速度としての平均推定速度を算出する算出部と、前記平均速度と、前記平均推定速度との差が、閾値以上である場合、位置ずれが発生していると判定する判定部と、を備える、ことを特徴とする。
【0006】
かかる構成によれば、自己位置の推定結果に位置ずれが発生していることを判定することができる。
上記目的を達成する制御装置において、前記取得部は、前記移動体の車速を検出する車速センサの検出結果を、前記移動体の速度を示す情報として取得し、前記算出部は、前記平均速度として、前記移動体の平均車速を算出してもよい。
【0007】
かかる構成によれば、精度良く移動体の位置ずれを判定することができる。
上記目的を達成する制御装置において、前記取得部は、前記移動体の角速度を検出する角速度センサの検出結果を、前記移動体の速度を示す情報として取得し、前記算出部は、前記平均速度として、前記移動体の平均角速度を算出してもよい。
【0008】
かかる構成によれば、精度良く移動体の向きのずれを判定することができる。
上記目的を達成する制御装置は、前記算出部は、前記所定期間内において、直前に前記移動体の速度が取得されたタイミングから所定時間だけ前までの間に取得された前記移動体の速度に基づいて、前記平均速度を算出する、及び前記所定期間内において、最後に前記自己位置が推定されたタイミングから前記所定時間だけ前までの間に推定された前記自己位置に基づいて、前記平均推定速度を算出してもよい。
【0009】
かかる構成によれば、所定期間内において取得されたデータのうち、適切なデータに基づいて、自己位置の推定結果のずれを判定することができる。
【発明の効果】
【0010】
本発明によれば、自己位置の推定結果に位置ずれが発生していることを判定することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社豊田自動織機
燃料電池システム
今日
株式会社豊田自動織機
燃料電池システム
今日
株式会社豊田自動織機
燃料電池システム
今日
株式会社豊田自動織機
燃料電池モジュール
今日
株式会社豊田自動織機
燃料電池モジュール、及び発電システム
今日
トヨタ自動車株式会社
電池の製造方法、電池
今日
個人
計量スプーン
20日前
個人
微小振動検出装置
1か月前
株式会社イシダ
X線検査装置
1か月前
大和製衡株式会社
組合せ秤
3日前
大和製衡株式会社
組合せ秤
3日前
アンリツ株式会社
分光器
26日前
株式会社ユーシン
操作検出装置
今日
ダイハツ工業株式会社
測定用具
24日前
株式会社東芝
センサ
1か月前
トヨタ自動車株式会社
検査装置
今日
アンリツ株式会社
分光器
26日前
株式会社東芝
センサ
3日前
株式会社東芝
センサ
3日前
トヨタ自動車株式会社
表示装置
12日前
株式会社ナリス化粧品
角層細胞採取用具
10日前
株式会社カワタ
サンプリング装置
1か月前
東レエンジニアリング株式会社
計量装置
今日
株式会社ヨコオ
コンタクタ
24日前
TDK株式会社
ガスセンサ
1か月前
株式会社精工技研
光電圧プローブ
1か月前
TDK株式会社
磁気センサ
20日前
個人
粘塑性を用いた有限要素法の定式化
12日前
TDK株式会社
磁気センサ
27日前
成田空港給油施設株式会社
保持治具
11日前
三菱マテリアル株式会社
温度センサ
1か月前
日本碍子株式会社
ガスセンサ
21日前
TDK株式会社
磁気計測装置
11日前
中国電力株式会社
異常箇所検出装置
11日前
三菱マテリアル株式会社
温度センサ
10日前
富士電機株式会社
半導体パッケージ
20日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ