TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141416
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024041335
出願日
2024-03-15
発明の名称
情報処理システム、情報処理方法およびプログラム
出願人
株式会社リコー
代理人
弁理士法人酒井国際特許事務所
主分類
G08G
1/00 20060101AFI20250919BHJP(信号)
要約
【課題】AGVの到着前に設備に予備動作を行わせることができる情報処理システム、情報処理方法およびプログラムを提供する。
【解決手段】予め設定された運行設定で複数の設備間を運行する複数の無人搬送車の運行を管理する情報処理システムであって、複数の無人搬送車から、複数の無人搬送車の車両状態を示す車両状態情報をそれぞれ取得する取得部と、取得部により取得された車両状態情報から、それぞれの設備に対応する停止位置に到着するまでの到着時間を予測する予測部と、予測部により予測された到着時間が、設備の本動作の実行の準備状態にするための事前に行う予備動作の時間以下となる前記無人搬送車および設備を特定する特定部と、特定部により無人搬送車および設備が特定されたとき、設備に対して予備動作の実行を指示する動作指示部と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
予め設定された運行設定で複数の設備間を運行する複数の無人搬送車の運行を管理する情報処理システムであって、
前記複数の無人搬送車から、該複数の無人搬送車の車両状態を示す車両状態情報をそれぞれ取得する取得部と、
前記取得部により取得された前記車両状態情報から、それぞれの前記設備に対応する停止位置に到着するまでの到着時間を予測する予測部と、
前記予測部により予測された到着時間が、前記設備の本動作の実行の準備状態にするための事前に行う予備動作の時間以下となる前記無人搬送車および前記設備を特定する特定部と、
前記特定部により前記無人搬送車および前記設備が特定されたとき、該設備に対して前記予備動作の実行を指示する動作指示部と、
を備えた情報処理システム。
続きを表示(約 2,100 文字)
【請求項2】
前記予測部は、
前記取得部により取得された前記車両状態情報に含まれる前記無人搬送車の位置情報、および前記設備の設置地点から、該無人搬送車の位置から該設備の設置地点までの距離を算出し、
前記車両状態情報に含まれる前記無人搬送車の速度情報、および算出した前記距離から、前記停止位置に到着するまでの到着時間を算出することによって該到着時間を予測する請求項1に記載の情報処理システム。
【請求項3】
少なくとも前記設備の設置地点と、該設備の前記予備動作の時間とが関連付けられた設備情報を記憶する記憶部を、さらに備え、
前記予測部は、前記取得部により取得された前記車両状態情報に含まれる前記無人搬送車の位置情報、および前記設備情報に含まれる前記設備の設置地点から、該無人搬送車の位置から該設備の設置地点までの距離を算出し、
前記特定部は、前記予測部により予測された到着時間が、前記設備情報に含まれる前記予備動作の時間以下となる前記無人搬送車および前記設備を特定する請求項2に記載の情報処理システム。
【請求項4】
前記予測部は、前記取得部により取得された前記車両状態情報から、それぞれの前記設備に対応する停止位置に到着するまでの到着時刻を予測し、
前記特定部は、前記予測部により予測された該設備の到着時刻が、現在時刻と前記設備の予備動作の時間との和以下となる前記無人搬送車および前記設備を特定する請求項1~3のいずれか一項に記載の情報処理システム。
【請求項5】
前記動作指示部は、前記特定部により特定された前記無人搬送車が該特定部により特定された前記設備に対応する停止位置へ到着し、かつ、該設備が前記予備動作を完了した場合、該設備に対して前記本動作の実行を指示する請求項1~3のいずれか一項に記載の情報処理システム。
【請求項6】
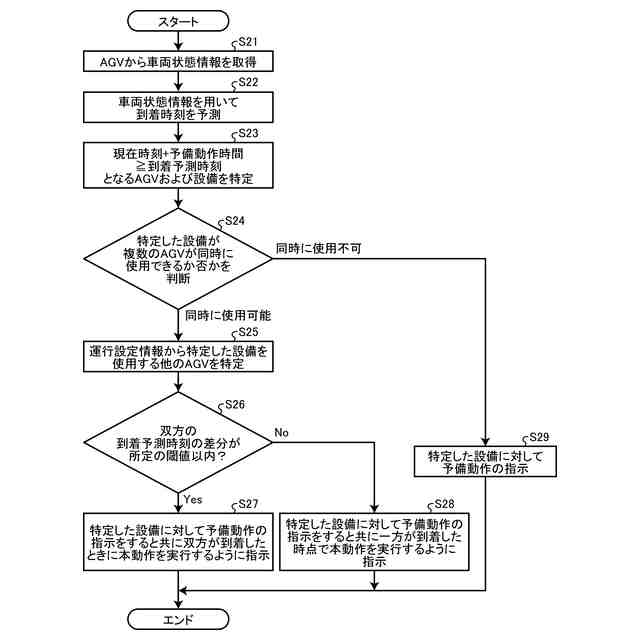
前記設備情報は、前記設備が同時に使用可能か否かの情報を含み、
前記特定部は、
前記設備情報を参照して、特定した前記設備が同時に使用可能か否かを判断し、
特定した前記設備が同時に使用可能である場合、前記運行設定に基づいて、特定した前記無人搬送車である第1無人搬送車以外の、該設備を使用する他の無人搬送車である第2無人搬送車を特定し、
前記予測部により予測された前記第1無人搬送車の到着時間と、該予測部により予測された前記第2無人搬送車の到着時間との差分が、所定の閾値以内であるか否かを判定する判定部を、さらに備え、
前記判定部により前記差分が前記所定の閾値以内であると判定された場合、前記動作指示部は、前記特定部により特定された前記設備に対して前記予備動作の実行を指示すると共に、前記第1無人搬送車および前記第2無人搬送車の双方が該設備に対応する停止位置に到着したときに該設備に対して前記本動作の実行を指示する請求項3に記載の情報処理システム。
【請求項7】
前記判定部により前記差分が前記所定の閾値を超過すると判定された場合、前記動作指示部は、前記特定部により特定された前記設備に対して前記予備動作の実行を指示すると共に、前記第1無人搬送車および前記第2無人搬送車のうち一方が該設備に対応する停止位置に到着した時点で該設備が前記本動作を実行するための指示を行う請求項6に記載の情報処理システム。
【請求項8】
予め設定された運行設定で複数の設備間を運行する複数の無人搬送車の運行を管理する情報処理装置の情報処理方法であって、
前記複数の無人搬送車から、該複数の無人搬送車の車両状態を示す車両状態情報をそれぞれ取得する取得ステップと、
取得した前記車両状態情報から、それぞれの前記設備に対応する停止位置に到着するまでの到着時間を予測する予測ステップと、
予測した到着時間が、前記設備の本動作の実行の準備状態にするための事前に行う予備動作の時間以下となる前記無人搬送車および前記設備を特定する特定ステップと、
前記無人搬送車および前記設備を特定したとき、該設備に対して前記予備動作の実行を指示する動作指示ステップと、
を有する情報処理方法。
【請求項9】
予め設定された運行設定で複数の設備間を運行する複数の無人搬送車の運行を管理するコンピュータに、
前記複数の無人搬送車から、該複数の無人搬送車の車両状態を示す車両状態情報をそれぞれ取得する取得ステップと、
取得した前記車両状態情報から、それぞれの前記設備に対応する停止位置に到着するまでの到着時間を予測する予測ステップと、
予測した到着時間が、前記設備の本動作の実行の準備状態にするための事前に行う予備動作の時間以下となる前記無人搬送車および前記設備を特定する特定ステップと、
前記無人搬送車および前記設備を特定したとき、該設備に対して前記予備動作の実行を指示する動作指示ステップと、
を実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理システム、情報処理方法およびプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
AGV(Automatic Guided Vehicle:無人搬送車)の運行を効率化するために、複数の搬送要求を受けてAGVに最適な移動指示を行うことで効率的に配車する技術が既に知られている。
【0003】
このようなAGVの効率的な運行管理の技術として、複数の搬送要求を考慮してAGVを配車するために、AGVを制御する管理サーバと、搬送要求とAGVの移動ルートとを割り当てる最適化サーバと、を含む構成が開示されている(例えば特許文献1)。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では、AGVが所定の地点に到着してから、設備の予備動作が行われるという課題がある。
【0005】
本発明は、AGVの到着前に設備に予備動作を行わせることができる情報処理システム、情報処理方法およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明は、予め設定された運行設定で複数の設備間を運行する複数の無人搬送車の運行を管理する情報処理システムであって、前記複数の無人搬送車から、該複数の無人搬送車の車両状態を示す車両状態情報をそれぞれ取得する取得部と、前記取得部により取得された前記車両状態情報から、それぞれの前記設備に対応する停止位置に到着するまでの到着時間を予測する予測部と、前記予測部により予測された到着時間が、前記設備の本動作の実行の準備状態にするための事前に行う予備動作の時間以下となる前記無人搬送車および前記設備を特定する特定部と、前記特定部により前記無人搬送車および前記設備が特定されたとき、該設備に対して前記予備動作の実行を指示する動作指示部と、を備えたことを特徴とする。
【発明の効果】
【0007】
本発明によれば、AGVの到着前に設備に予備動作を行わせることができる。
【図面の簡単な説明】
【0008】
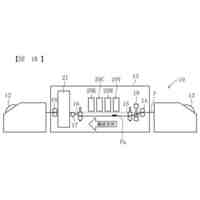
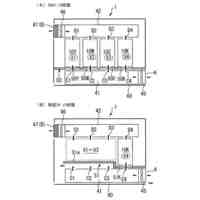
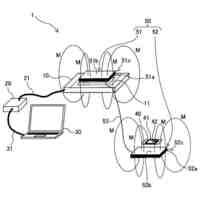
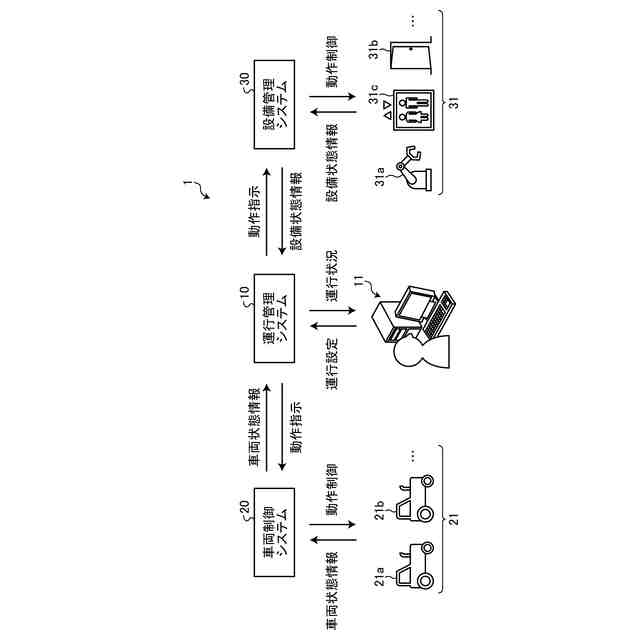
図1は、実施形態に係る情報処理システムの全体構成および動作の概要の一例を示す図である。
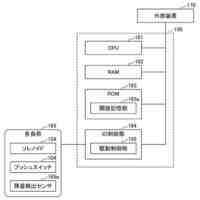
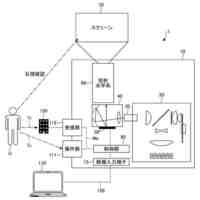
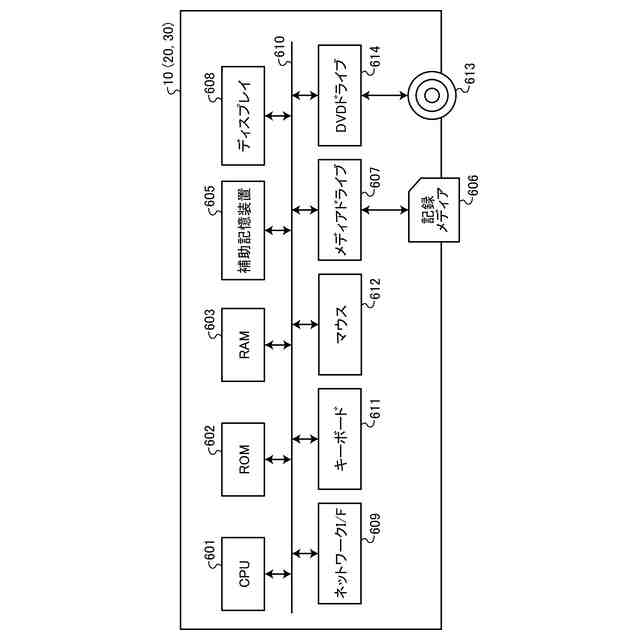
図2は、実施形態に係る運行管理システム等のハードウェア構成の一例を示す図である。
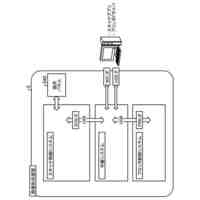
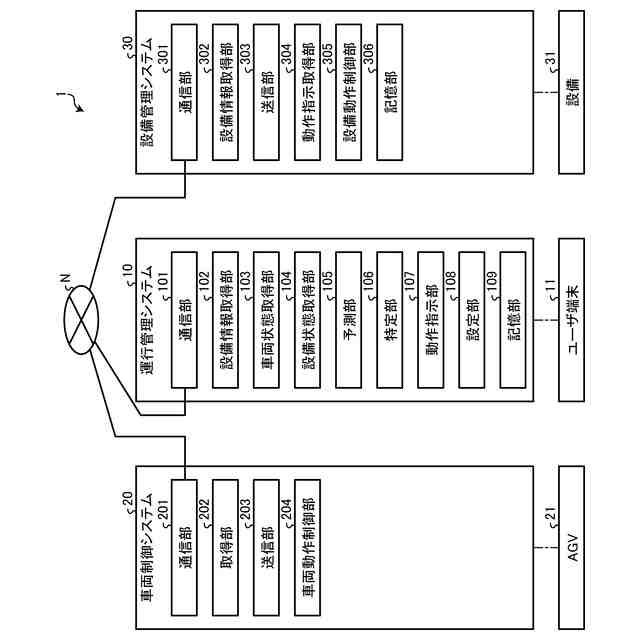
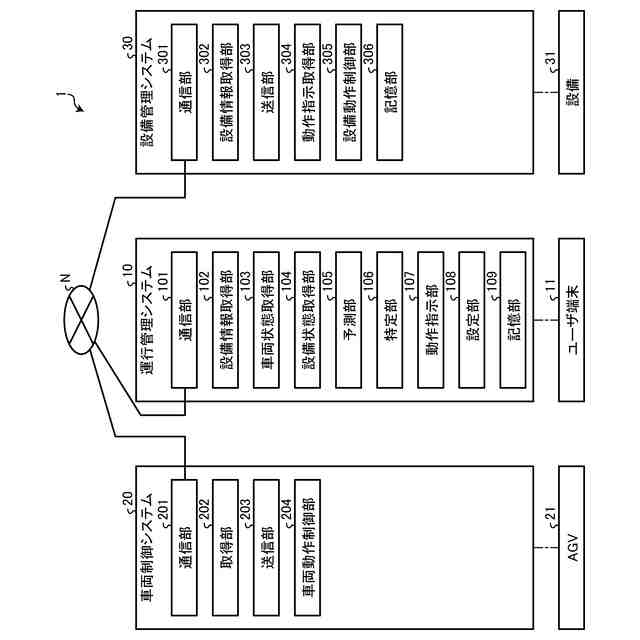
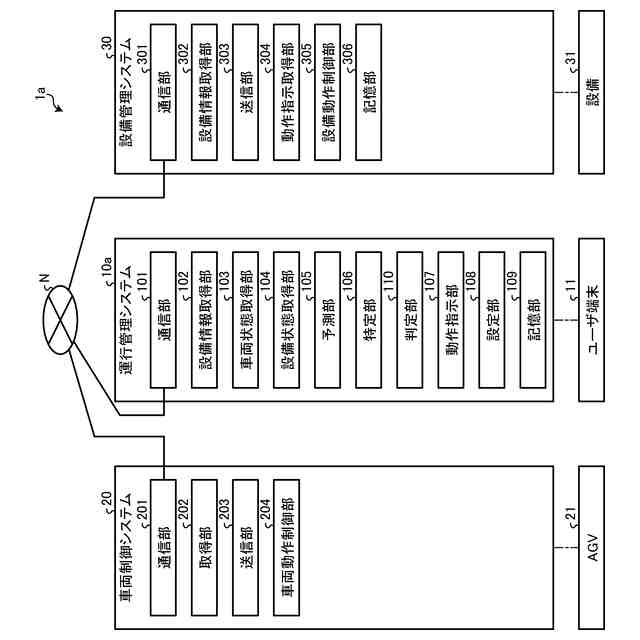
図3は、実施形態に係る情報処理システムの機能ブロックの構成の一例を示す図である。
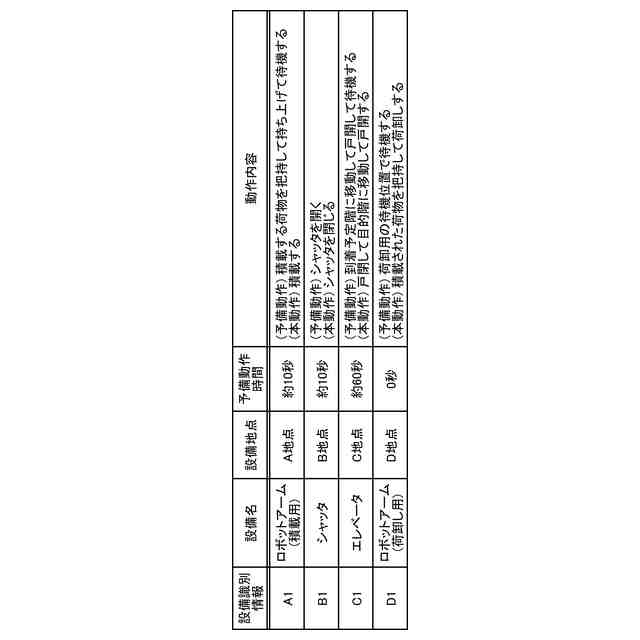
図4は、実施形態に係る設備管理システムにおける工場設備情報の一例を示す図である。
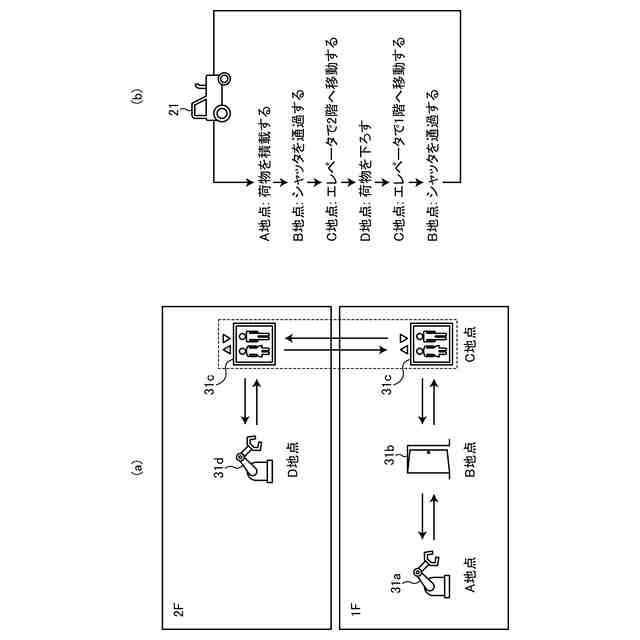
図5は、実施形態に係る情報処理システムで管理する運行ルートの一例を示す図である。
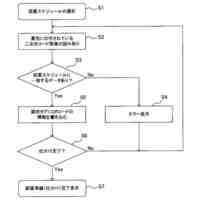
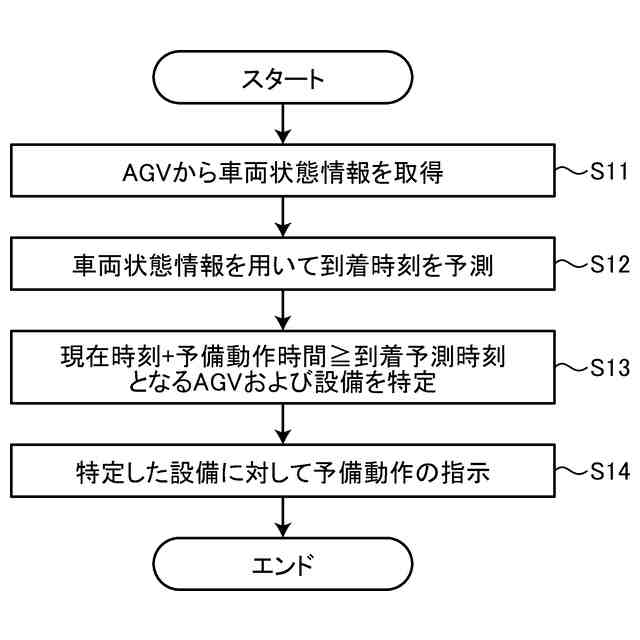
図6は、実施形態に係る情報処理システムの運行管理動作の流れの一例を示すフローチャートである。
図7は、変形例に係る情報処理システムの機能ブロックの構成の一例を示す図である。
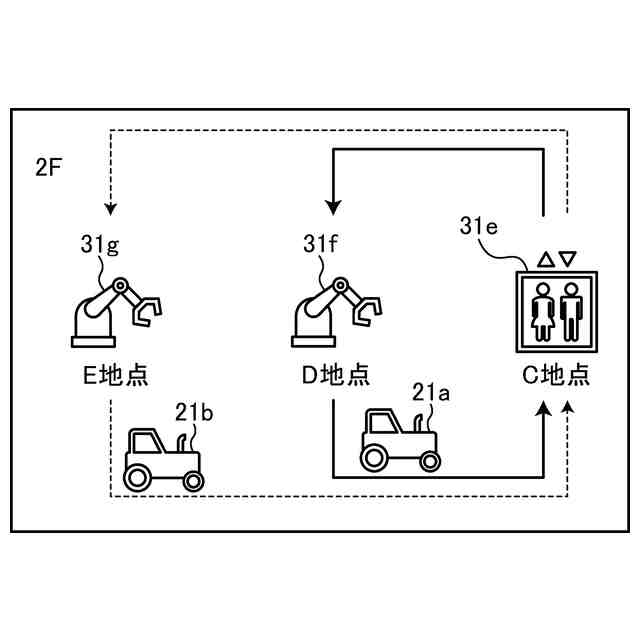
図8は、変形例に係る情報処理システムで管理する運行ルートの一例を示す図である。
図9は、変形例に係る情報処理システムの運行管理動作の流れの一例を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下に、図面を参照しながら、本発明に係る情報処理システム、情報処理方法およびプログラムの実施形態を詳細に説明する。また、以下の実施形態によって本発明が限定されるものではなく、以下の実施の形態における構成要素には、当業者が容易に想到できるもの、実質的に同一のもの、およびいわゆる均等の範囲のものが含まれる。さらに、以下の実施形態の要旨を逸脱しない範囲で構成要素の種々の省略、置換、変更および組み合わせを行うことができる。
【0010】
(情報処理システムの構成および動作概要)
図1は、実施形態に係る情報処理システムの全体構成および動作の概要の一例を示す図である。図1を参照しながら、本実施形態に係る情報処理システム1の全体構成および動作の概要について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社リコー
ユニット
1か月前
株式会社リコー
塗装装置
1か月前
株式会社リコー
綴じ装置
1か月前
株式会社リコー
液体吐出装置
1か月前
株式会社リコー
画像形成装置
23日前
株式会社リコー
水力発電装置
1か月前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
7日前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
4日前
株式会社リコー
画像形成装置
4日前
株式会社リコー
画像形成装置
4日前
株式会社リコー
画像形成装置
22日前
株式会社リコー
印刷システム
4日前
株式会社リコー
感熱記録媒体
1日前
株式会社リコー
画像投射装置
1か月前
株式会社リコー
液体吐出装置
1か月前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
液体塗布装置
1か月前
株式会社リコー
映像表示装置
25日前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
15日前
株式会社リコー
液体塗布装置
8日前
株式会社リコー
液体吐出装置
1か月前
株式会社リコー
履帯式走行体
1か月前
株式会社リコー
生体情報測定装置
1日前
株式会社リコー
投薬管理システム
23日前
株式会社リコー
拡張アンテナ装置
7日前
株式会社リコー
画像投射システム
15日前
株式会社リコー
情報処理システム
25日前
株式会社リコー
印刷応答補償機構
8日前
株式会社リコー
液体を吐出する装置
1日前
株式会社リコー
カラー画像形成装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ