TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025142507
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024041912
出願日
2024-03-18
発明の名称
処理システム、処理方法、およびプログラム
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
G06T
7/70 20170101AFI20250924BHJP(計算;計数)
要約
【課題】遠隔操作を支援することのできる処理システムを提供する。
【解決手段】処理システムは、ロボットアームの遠隔操作時に、前記ロボットアームの先端位置を通り、奥行方向に並行となる線分である第1線分を描画する第1処理部と、前記第1線分から鉛直方向に沿って面を描画する第2処理部と、前記面内に、前記ロボットアームの先端位置から鉛直方向に線分を描画する第3処理部と、を備える。
【選択図】図10
特許請求の範囲
【請求項1】
ロボットアームの遠隔操作時に、前記ロボットアームの先端位置を通り、奥行方向に並行となる線分である第1線分を描画する第1処理部と、
前記第1線分から鉛直方向に沿って面を描画する第2処理部と、
前記面内に、前記ロボットアームの先端位置から鉛直方向に線分を描画する第3処理部と、
を備える処理システム。
続きを表示(約 630 文字)
【請求項2】
前記ロボットアームの先端位置の奥行と同じ奥行に存在する物体の面上に線を描画する第4処理部、
を備える請求項1に記載の処理システム。
【請求項3】
前記ロボットアームが存在する実空間における座標系と、描画される画面上の座標系とが一致するように修正する第5処理部、
を備える請求項1または請求項2に記載の処理システム。
【請求項4】
前記ロボットアームを遠隔操作する操作における座標系と、描画される画面上の座標系とが一致するように修正する第6処理部、
を備える請求項1に記載の処理システム。
【請求項5】
ロボットアームの遠隔操作時に、前記ロボットアームの先端位置を通り、奥行方向に並行となる線分である第1線分を描画することと、
前記第1線分から鉛直方向に沿って面を描画することと、
前記面内に、前記ロボットアームの先端位置から鉛直方向に線分を描画することと、
を含む処理方法。
【請求項6】
コンピュータに、
ロボットアームの遠隔操作時に、前記ロボットアームの先端位置を通り、奥行方向に並行となる線分である第1線分を描画することと、
前記第1線分から鉛直方向に沿って面を描画することと、
前記面内に、前記ロボットアームの先端位置から鉛直方向に線分を描画することと、
を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、処理システム、処理方法、およびプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
ロボットは様々な分野で使用されている。特許文献1には、関連する技術として、ロボットを遠隔操作する制御装置に関する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第3924495号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のようなロボットの遠隔操作に関連する技術分野では、遠隔操作を支援することのできる技術が求められている。
【0005】
本開示の各態様は、上記の課題を解決することのできる処理システム、処理方法、およびプログラムを提供することを目的の1つとしている。
【課題を解決するための手段】
【0006】
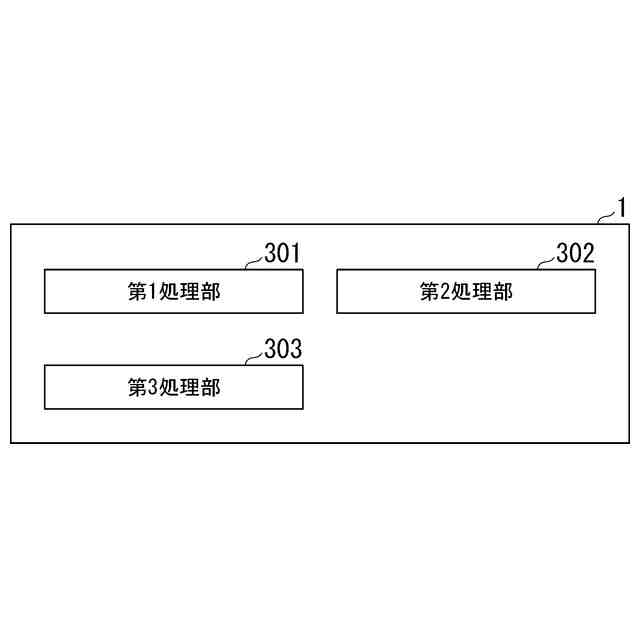
本開示の一態様によれば、処理システムは、ロボットアームの遠隔操作時に、前記ロボットアームの先端位置を通り、奥行方向に並行となる線分である第1線分を描画する第1処理部と、前記第1線分から鉛直方向に沿って面を描画する第2処理部と、前記面内に、前記ロボットアームの先端位置から鉛直方向に線分を描画する第3処理部と、を備える。
【0007】
本開示の別の態様によれば、処理方法は、ロボットアームの遠隔操作時に、前記ロボットアームの先端位置を通り、奥行方向に並行となる線分である第1線分を描画することと、前記第1線分から鉛直方向に沿って面を描画することと、前記面内に、前記ロボットアームの先端位置から鉛直方向に線分を描画することと、を含む。
【0008】
本開示の別の態様によれば、プログラムは、コンピュータに、ロボットアームの遠隔操作時に、前記ロボットアームの先端位置を通り、奥行方向に並行となる線分である第1線分を描画することと、前記第1線分から鉛直方向に沿って面を描画することと、前記面内に、前記ロボットアームの先端位置から鉛直方向に線分を描画することと、を実行させる。
【発明の効果】
【0009】
本開示の各態様によれば、遠隔操作を支援することができる。
【図面の簡単な説明】
【0010】
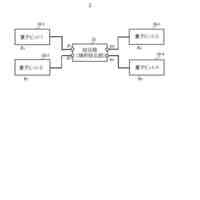
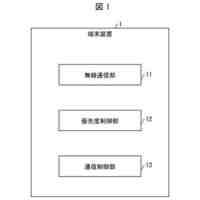
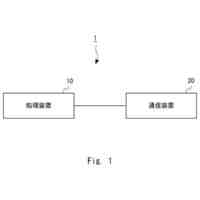
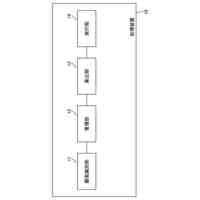
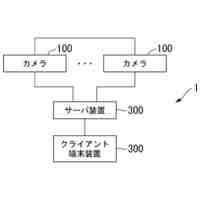
本開示のいくつかの実施形態にかかる処理システムの構成の一例を示す図である。
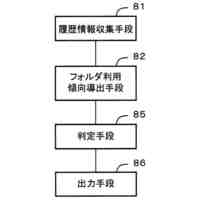
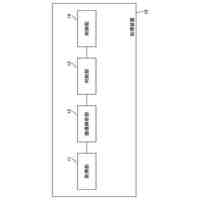
本開示のいくつかの実施形態にかかる処理システムの処理フローの一例を示す図である。
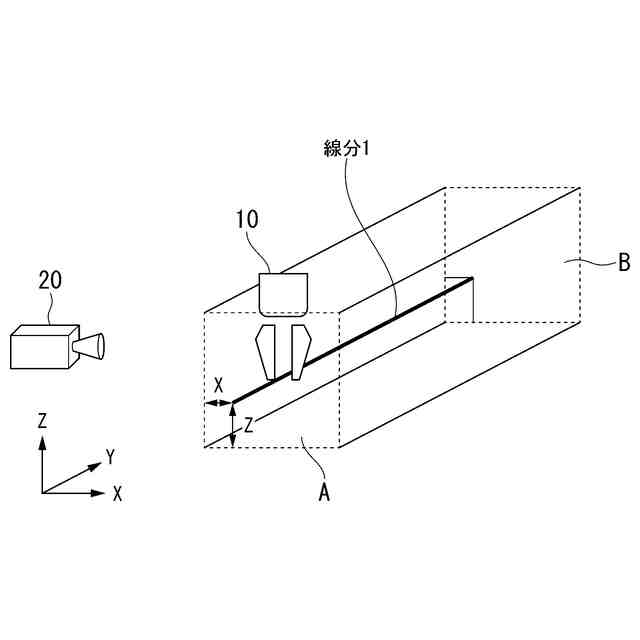
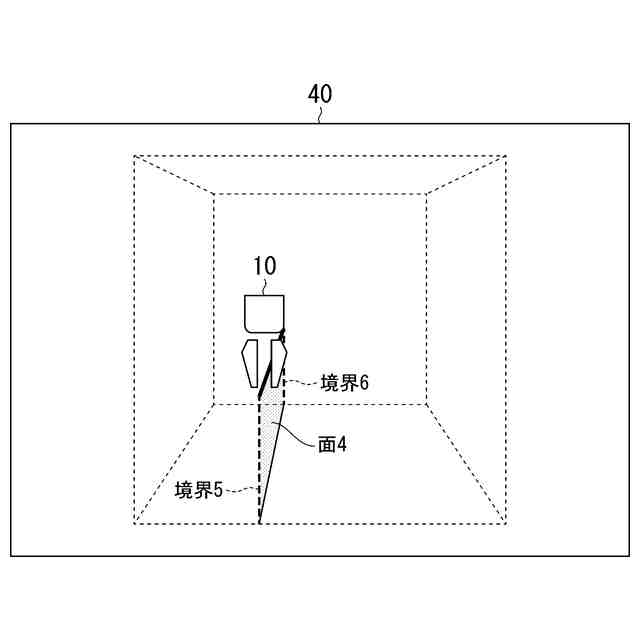
本開示のいくつかの実施形態にかかる画像処理装置が描画する線分の一例を示す図である。
本開示のいくつかの実施形態にかかる画像処理装置が描画する線分を説明するための図である。
本開示のいくつかの実施形態にかかる画像処理装置が描画する面を説明するための図である。
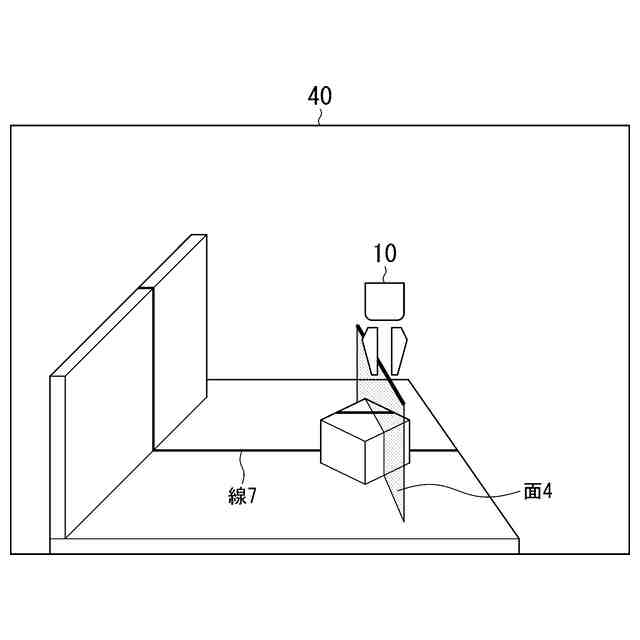
本開示のいくつかの実施形態にかかる画像処理装置が物体の面に描画する線を説明するための図である。
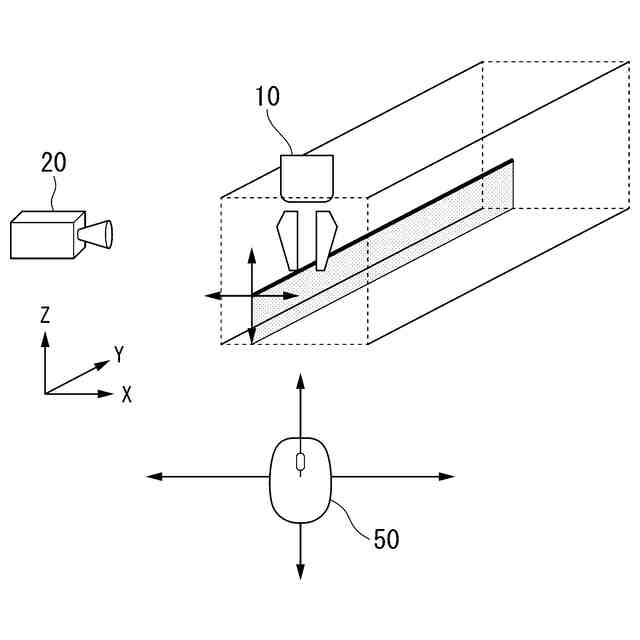
本開示のいくつかの実施形態にかかる画像処理装置が描画する線分を説明するための図である。
本開示のいくつかの実施形態にかかる画像処理装置が行う補正を説明するための第1の図である。
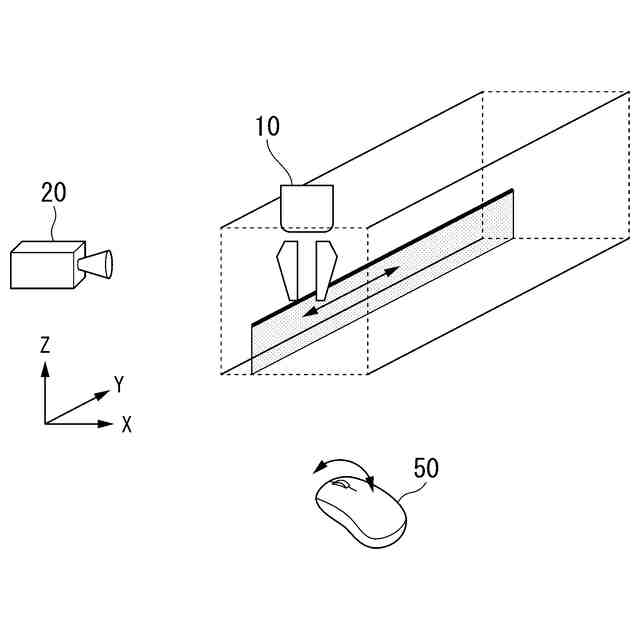
本開示のいくつかの実施形態にかかる画像処理装置が行う補正を説明するための第2の図である。
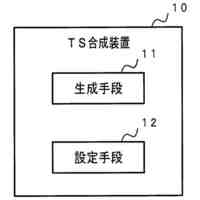
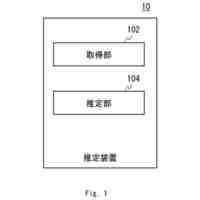
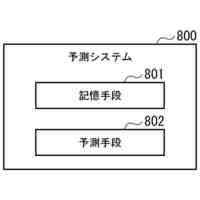
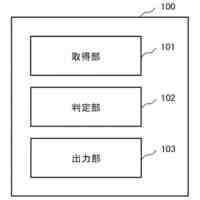
本開示のいくつかの実施形態にかかる処理システムの構成の一例を示す図である。
本開示のいくつかの実施形態にかかる処理システム1の処理フローの一例を示す図である。
少なくとも1つの実施形態に係るコンピュータの構成を示す概略ブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本電気株式会社
学習装置
1か月前
日本電気株式会社
分析装置
2日前
日本電気株式会社
学習装置
26日前
日本電気株式会社
原子発振器
28日前
日本電気株式会社
超伝導量子回路
22日前
日本電気株式会社
マルチバンドバラン
20日前
日本電気株式会社
量子回路装置と制御方法
2日前
日本電気株式会社
量子回路装置と制御方法
2日前
日本電気株式会社
検知装置および検知方法
2日前
日本電気株式会社
移相器およびアンテナ装置
1か月前
日本電気株式会社
移相器およびアンテナ装置
1か月前
日本電気株式会社
移相器およびアンテナ装置
1か月前
日本電気株式会社
端末装置および無線通信方法
13日前
日本電気株式会社
機器冷却装置及びその冷却方法
14日前
日本電気株式会社
TS合成装置および放送システム
29日前
日本電気株式会社
光ファイバ伝送路及び光伝送方法
1か月前
日本電気株式会社
処理装置、方法、及びプログラム
26日前
日本電気株式会社
ケージ、光伝送装置及び挿抜方法
1か月前
日本電気株式会社
共振器及びそれを備えた導波回路
今日
日本電気株式会社
プログラム、算出装置、及び方法
14日前
日本電気株式会社
リング共振器、およびその製造方法
28日前
日本電気株式会社
推定装置、推定方法及びプログラム
5日前
日本電気株式会社
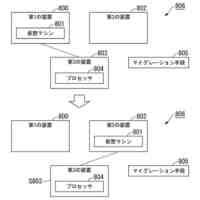
システム及びマイグレーション方法
2日前
日本電気株式会社
ピーク抑圧装置及びピーク抑圧方法
12日前
日本電気株式会社
レドーム、及びレドームの製造方法
1か月前
日本電気株式会社
推定装置、推定方法及びプログラム
5日前
日本電気株式会社
リング共振器、およびその製造方法
27日前
日本電気株式会社
処理装置、処理方法、及びプログラム
1か月前
日本電気株式会社
処理装置、処理方法、及びプログラム
1か月前
日本電気株式会社
画像管理システムおよび画像管理方法
今日
日本電気株式会社
処理装置、処理方法、及びプログラム
2日前
日本電気株式会社
通信システム及びパケット順序補正方法
13日前
日本電気株式会社
予測システム、予測方法及びプログラム
5日前
日本電気株式会社
判定装置、判定方法、及び、プログラム
22日前
日本電気株式会社
分析装置、分析方法、およびプログラム
1か月前
日本電気株式会社
管理システム、管理方法及びプログラム
12日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ