TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025134371
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024032237
出願日
2024-03-04
発明の名称
プログラム、算出装置、及び方法
出願人
日本電気株式会社
代理人
個人
主分類
G01V
5/00 20240101AFI20250909BHJP(測定;試験)
要約
【課題】荷電粒子に基づく測定値を用いた移動体の構造特定に有用な情報を算出可能な、プログラム、算出装置、及び、方法を提供する。
【解決手段】算出装置は、第1荷電粒子センサの複数の第1測定タイミングにそれぞれ対応する複数の第1測定値セットと、第2荷電粒子センサの複数の第2測定タイミングにそれぞれ対応する複数の第2測定値セットと、前記第1荷電粒子センサに対する前記第2荷電粒子センサの第1の相対的な位置関係とに基づいて、移動体の速度、及び、前記第1荷電粒子センサに対する前記移動体の第2の相対的な位置関係を推定し、前記推定された速度及び第2の相対的な位置関係と、前記第1の相対的な位置関係とに基づいて、前記移動体の静止座標系における各第1測定タイミングに対応する前記第1荷電粒子センサの位置、及び、前記移動体の静止座標系における各第2測定タイミングに対応する前記第2荷電粒子センサの位置を算出する。
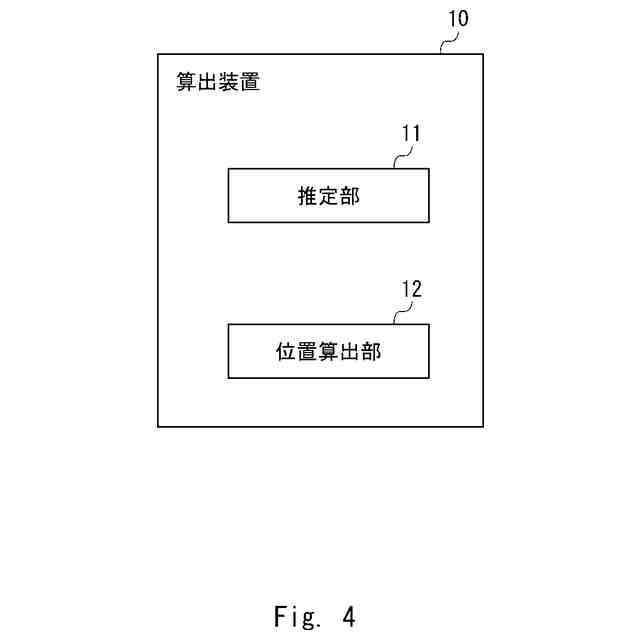
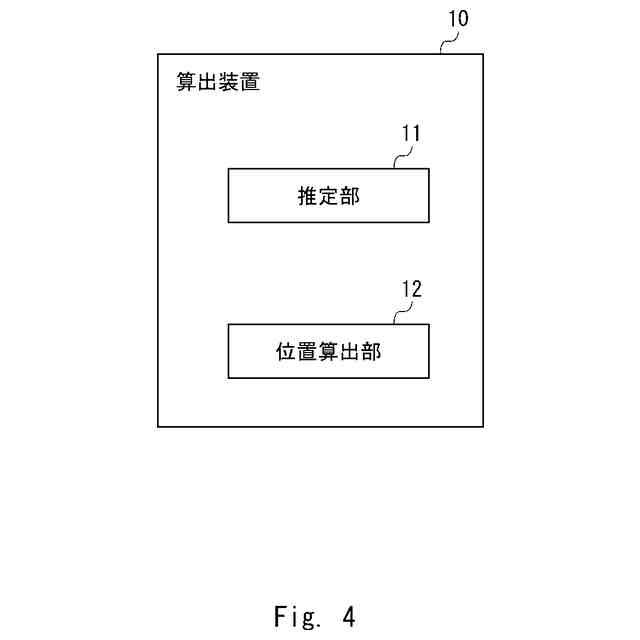
【選択図】図4
特許請求の範囲
【請求項1】
第1荷電粒子センサの複数の第1測定タイミングにそれぞれ対応する複数の第1測定値セットと、第2荷電粒子センサの複数の第2測定タイミングにそれぞれ対応する複数の第2測定値セットと、前記第1荷電粒子センサに対する前記第2荷電粒子センサの第1の相対的な位置関係とに基づいて、移動体の速度、及び、前記第1荷電粒子センサに対する前記移動体の第2の相対的な位置関係を推定することと、
前記推定された速度及び第2の相対的な位置関係と、前記第1の相対的な位置関係とに基づいて、前記移動体の静止座標系における各第1測定タイミングに対応する前記第1荷電粒子センサの位置、及び、前記移動体の静止座標系における各第2測定タイミングに対応する前記第2荷電粒子センサの位置を算出することと、
を含む処理を、コンピュータに実行させるプログラム。
続きを表示(約 3,800 文字)
【請求項2】
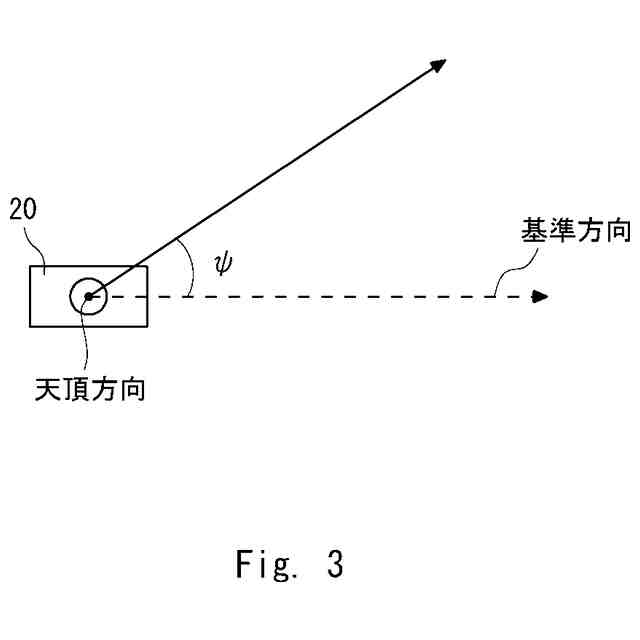
各第1測定値セットは、前記第1荷電粒子センサのセンサ面に直交する方向を基準とした角度である天頂角候補と前記センサ面における基準からの角度である方位角候補との複数の組み合わせにそれぞれ対応する複数の第1測定値を含み、
各第2測定値セットは、前記第2荷電粒子センサのセンサ面に直交する方向を基準とした角度である天頂角候補と前記センサ面における基準からの角度である方位角候補との複数の組み合わせにそれぞれ対応する複数の第2測定値を含み、
前記移動体の速度を推定することは、
各第1測定値セットに関して、各第1測定値セットの複数の組み合わせにおいて、天頂角候補が共通する複数の第1測定値のうちで他の第1測定値と値が離れている第1測定値に対応する組み合わせを特定することと、
各第1測定値セットに関して特定された組み合わせに基づいて、各第1測定タイミングにおいて前記第1荷電粒子センサを基準として前記移動体が存在する存在方向を特定することと、
各第2測定値セットに関して、各第2測定値セットの複数の組み合わせにおいて、天頂角候補が共通する複数の第2測定値のうちで他の第2測定値と値が離れている第2測定値に対応する組み合わせを特定することと、
各第2測定値セットに関して特定された組み合わせに基づいて、各第2測定タイミングにおいて前記第2荷電粒子センサを基準として前記移動体が存在する存在方向を特定することと、
各第1測定タイミングにおいて前記第1荷電粒子センサを基準として前記移動体が存在する存在方向と、各第2測定タイミングにおいて前記第2荷電粒子センサを基準として前記移動体が存在する存在方向と、前記第1の相対的な位置関係とに基づいて、前記移動体の速度を算出することと、
を含む、
請求項1記載のプログラム。
【請求項3】
各第1測定値セットに関して、各第1測定値セットの複数の組み合わせにおいて、天頂角候補が共通する複数の第1測定値のうちで他の第1測定値と値が離れている第1測定値に対応する組み合わせを特定することは、各第1測定値セットに関して、各第1測定値セットの複数の組み合わせにおいて、天頂角候補が共通する複数の第1測定値のうちで、該複数の第1測定値の統計値との差の絶対値が最も大きい第1測定値に対応する組み合わせを特定することを含み、
各第2測定値セットに関して、各第2測定値セットの複数の組み合わせにおいて、天頂角候補が共通する複数の第2測定値のうちで他の第2測定値と値が離れている第2測定値に対応する組み合わせを特定することは、各第2測定値セットに関して、各第2測定値セットの複数の組み合わせにおいて、天頂角候補が共通する複数の第2測定値のうちで、該複数の第2測定値の統計値との差の絶対値が最も大きい第2測定値に対応する組み合わせを特定することを含む、
請求項2記載のプログラム。
【請求項4】
前記移動体の静止座標系における各第1測定タイミングに対応する前記第1荷電粒子センサの位置を算出することは、
一の第1測定タイミングと前記一の第1測定タイミングよりも1つ後の他の第1測定タイミングとの間の時間長と、前記推定された速度とに基づいて、前記移動体の移動距離を算出することと、
前記算出された移動距離と、前記移動体の静止座標系における前記一の第1測定タイミングに対応する前記第1荷電粒子センサの位置とに基づいて、前記移動体の静止座標系における前記他の第1測定タイミングに対応する前記第1荷電粒子センサの位置を算出することと、
を含む、
請求項1から3のいずれか1項に記載のプログラム。
【請求項5】
前記処理は、各第1測定値セット及び各第1測定値セットの第1測定タイミングに対応する前記静止座標系における前記第1荷電粒子センサの位置、並びに、各第2測定値セット及び各第2測定値セットの第2測定タイミングに対応する前記静止座標系における前記第2荷電粒子センサの位置に基づいて、前記移動体の3次元形状を算出することを含む、
請求項1から3のいずれか1項に記載のプログラム。
【請求項6】
前記移動体の3次元形状を算出することは、
前記移動体、前記第1荷電粒子センサ、及び前記第2荷電粒子センサを含む、三次元空間を複数のボクセルの集合で表現した第1のボリューム内の各ボクセルに密度情報として任意の値を設定し、前記第1のボリュームに対して所定の畳み込み演算を行う畳み込みニューラルネットワークにおける最終層に含まれる複数の第2のボリュームのそれぞれを、前記第1荷電粒子センサの前記静止座標系における位置と前記三次元空間に含まれる物質層との組み合わせ又は前記第2荷電粒子センサの前記静止座標系における位置と前記物質層との組み合わせに対応させて設定することと、
前記畳み込み演算により取得された最終層の値のうち、前記静止座標系における前記第1荷電粒子センサの位置ごとの各物質層に対応する前記第2のボリュームの値と、前記静止座標系における前記第2荷電粒子センサの位置ごとの各物質層に対応する前記第2のボリュームの値と、各物質層の種別に対応する物質の固有密度係数と、前記静止座標系における前記第1荷電粒子センサの位置と、前記静止座標系における前記第2荷電粒子センサの位置とを用いて、前記静止座標系における前記第1荷電粒子センサの位置ごとに前記第1測定値セットの期待値セットを再構成すると共に前記静止座標系における前記第2荷電粒子センサの位置ごとに前記第2測定値セットの期待値セットを再構成することと、
前記静止座標系における前記第1荷電粒子センサの位置ごとの前記再構成された期待値セットと前記第1測定値セットとの二乗誤差を含む第1誤差関数値と、前記静止座標系における前記第2荷電粒子センサの位置ごとの前記再構成された期待値セットと前記第2測定値セットとの二乗誤差を含む第2誤差関数値とを算出することと、
前記第1誤差関数値と前記第2誤差関数値との和が所定値以上である場合に、前記第1誤差関数値と第2誤差関数値との和を最小化するように、前記畳み込みニューラルネットワークのパラメータを学習することと、
前記学習後のパラメータを用いて前記畳み込み演算により最終層の値を取得することと、
前記取得された最終層の値と前記静止座標系における前記第1荷電粒子センサの位置と前記静止座標系における前記第2荷電粒子センサの位置とを用いて、前記三次元空間における前記密度情報の分布の推定値を推定することと、
前記第1誤差関数値と前記第2誤差関数値との和が所定値未満である場合に、前記密度情報の分布の推定値に基づいて、前記移動体の3次元形状を算出することと、
を含む、
請求項5記載のプログラム。
【請求項7】
各第1測定値及び各第2測定値は、前記天頂角候補と前記方位角候補との組み合わせごとの荷電粒子の数である、
請求項2記載のプログラム。
【請求項8】
前記荷電粒子は、ミューオンである、
請求項7記載のプログラム。
【請求項9】
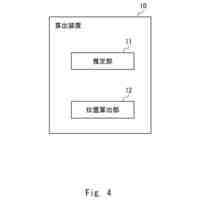
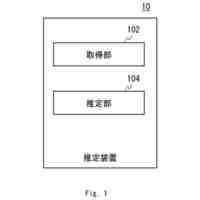
第1荷電粒子センサの複数の第1測定タイミングにそれぞれ対応する複数の第1測定値セットと、第2荷電粒子センサの複数の第2測定タイミングにそれぞれ対応する複数の第2測定値セットと、前記第1荷電粒子センサに対する前記第2荷電粒子センサの第1の相対的な位置関係とに基づいて、移動体の速度、及び、前記第1荷電粒子センサに対する前記移動体の第2の相対的な位置関係を推定する推定部と、
前記推定された速度及び第2の相対的な位置関係と、前記第1の相対的な位置関係とに基づいて、前記移動体の静止座標系における各第1測定タイミングに対応する前記第1荷電粒子センサの位置、及び、前記移動体の静止座標系における各第2測定タイミングに対応する前記第2荷電粒子センサの位置を算出する位置算出部と、
を具備する算出装置。
【請求項10】
算出装置が実行する方法であって、
第1荷電粒子センサの複数の第1測定タイミングにそれぞれ対応する複数の第1測定値セットと、第2荷電粒子センサの複数の第2測定タイミングにそれぞれ対応する複数の第2測定値セットと、前記第1荷電粒子センサに対する前記第2荷電粒子センサの第1の相対的な位置関係とに基づいて、移動体の速度、及び、前記第1荷電粒子センサに対する前記移動体の第2の相対的な位置関係を推定することと、
前記推定された速度及び第2の相対的な位置関係と、前記第1の相対的な位置関係とに基づいて、前記移動体の静止座標系における各第1測定タイミングに対応する前記第1荷電粒子センサの位置、及び、前記移動体の静止座標系における各第2測定タイミングに対応する前記第2荷電粒子センサの位置を算出することと、
を含む方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、プログラム、算出装置、及び方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
地下構造物(廃坑など)の探査にミュオグラフィを用いる際に、探査対象の構造物の形状をトモグラフィ的に三次元に復元するニーズが高まっている。例えば、特許文献1には、荷電粒子であるミュー粒子を利用した三次元地盤探査システムに関する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2013-2830号公報
国際公開第2022/097305号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1の技術による構造特定対象は、地盤の空洞等であり、移動しないことが前提であるため、特許文献1では構造特定対象として移動体を想定していない。このため、特許文献1の技術では、移動体の構造特定に有用な情報が得られない可能性がある。
【0005】
本開示の目的は、荷電粒子に基づく測定値を用いた移動体の構造特定に有用な情報を算出可能な、プログラム、算出装置、及び、方法を提供することにある。なお、この目的は、本明細書に開示される複数の実施形態が達成しようとする複数の目的の1つに過ぎないことに留意されるべきである。その他の目的又は課題と新規な特徴は、本明細書の記述又は添付図面から明らかにされる。
【課題を解決するための手段】
【0006】
本開示に係るプログラムは、第1荷電粒子センサの複数の第1測定タイミングにそれぞれ対応する複数の第1測定値セットと、第2荷電粒子センサの複数の第2測定タイミングにそれぞれ対応する複数の第2測定値セットと、前記第1荷電粒子センサに対する前記第2荷電粒子センサの第1の相対的な位置関係とに基づいて、移動体の速度、及び、前記第1荷電粒子センサに対する前記移動体の第2の相対的な位置関係を推定することと、前記推定された速度及び第2の相対的な位置関係と、前記第1の相対的な位置関係とに基づいて、前記移動体の静止座標系における各第1測定タイミングに対応する前記第1荷電粒子センサの位置、及び、前記移動体の静止座標系における各第2測定タイミングに対応する前記第2荷電粒子センサの位置を算出することと、を含む処理を、コンピュータに実行させる。
【0007】
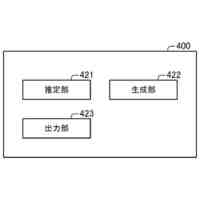
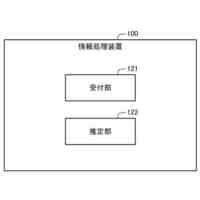
本開示に係る算出装置は、第1荷電粒子センサの複数の第1測定タイミングにそれぞれ対応する複数の第1測定値セットと、第2荷電粒子センサの複数の第2測定タイミングにそれぞれ対応する複数の第2測定値セットと、前記第1荷電粒子センサに対する前記第2荷電粒子センサの第1の相対的な位置関係とに基づいて、移動体の速度、及び、前記第1荷電粒子センサに対する前記移動体の第2の相対的な位置関係を推定する推定部と、前記推定された速度及び第2の相対的な位置関係と、前記第1の相対的な位置関係とに基づいて、前記移動体の静止座標系における各第1測定タイミングに対応する前記第1荷電粒子センサの位置、及び、前記移動体の静止座標系における各第2測定タイミングに対応する前記第2荷電粒子センサの位置を算出する位置算出部と、を具備する。
【0008】
本開示に係る方法は、算出装置が実行する方法であって、第1荷電粒子センサの複数の第1測定タイミングにそれぞれ対応する複数の第1測定値セットと、第2荷電粒子センサの複数の第2測定タイミングにそれぞれ対応する複数の第2測定値セットと、前記第1荷電粒子センサに対する前記第2荷電粒子センサの第1の相対的な位置関係とに基づいて、移動体の速度、及び、前記第1荷電粒子センサに対する前記移動体の第2の相対的な位置関係を推定することと、前記推定された速度及び第2の相対的な位置関係と、前記第1の相対的な位置関係とに基づいて、前記移動体の静止座標系における各第1測定タイミングに対応する前記第1荷電粒子センサの位置、及び、前記移動体の静止座標系における各第2測定タイミングに対応する前記第2荷電粒子センサの位置を算出することと、を含む。
【発明の効果】
【0009】
本開示により、荷電粒子に基づく測定値を用いた移動体の構造特定に有用な情報を算出可能な、プログラム、算出装置、及び、方法を提供することができる。
【図面の簡単な説明】
【0010】
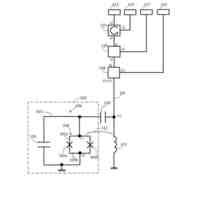
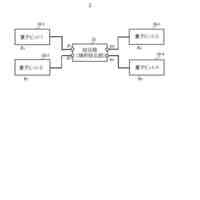
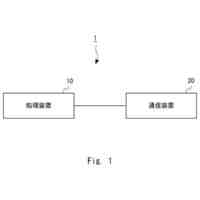
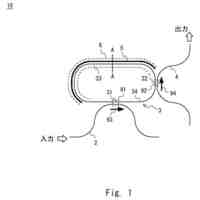
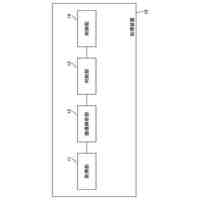
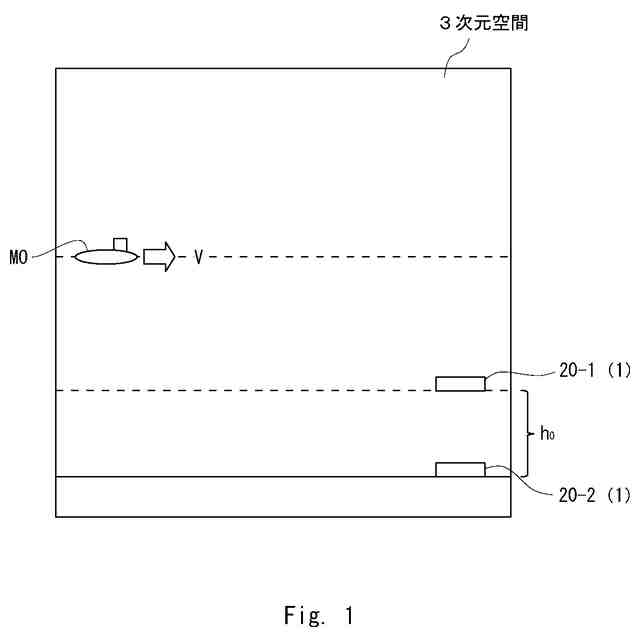
本開示のシステムの一例を示す図である。
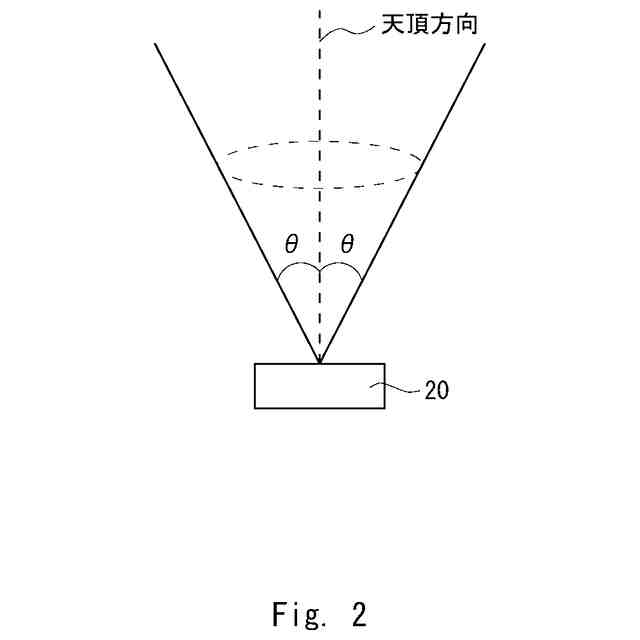
天頂角の説明に供する図である。
方位角候補の説明に供する図である。
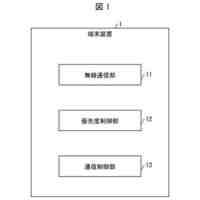
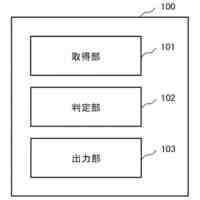
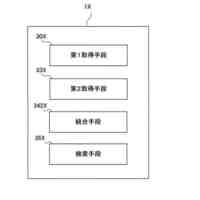
本開示の算出装置の一例を示すブロック図である。
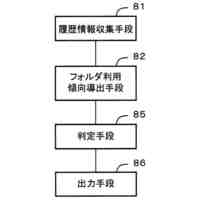
本開示の算出装置の処理動作の一例を示すフローチャートである。
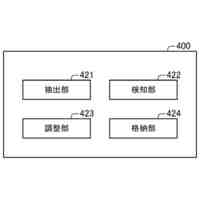
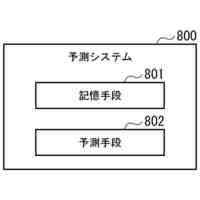
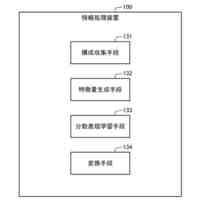
本開示の算出装置の他の一例を示すブロック図である。
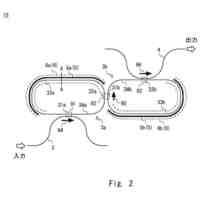
フラックス異常方向の説明に供する図である。
フラックス異常方向の説明に供する図である。
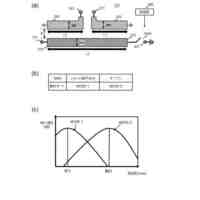
測定器から見た移動体MOが存在する方向の角度が測定タイミングによって変化する様子を示す図である。
測定器から見た移動体MOが存在する方向の角度が測定タイミングによって変化する様子を示す図である。
各測定タイミングに対応する測定器の位置の算出の説明に供する図である。
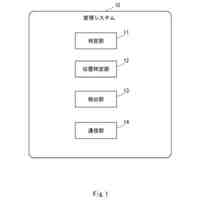
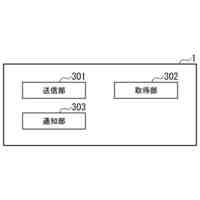
本開示の算出装置の他の一例を示すブロック図である。
本開示の算出装置の処理動作の他の一例を示すフローチャートである。
算出装置の構成例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本電気株式会社
学習装置
24日前
日本電気株式会社
分析装置
今日
日本電気株式会社
原子発振器
26日前
日本電気株式会社
超伝導量子回路
20日前
日本電気株式会社
マルチバンドバラン
18日前
日本電気株式会社
量子回路装置と制御方法
今日
日本電気株式会社
量子回路装置と制御方法
今日
日本電気株式会社
検知装置および検知方法
今日
日本電気株式会社
端末装置および無線通信方法
11日前
日本電気株式会社
機器冷却装置及びその冷却方法
12日前
日本電気株式会社
処理装置、方法、及びプログラム
24日前
日本電気株式会社
プログラム、算出装置、及び方法
12日前
日本電気株式会社
TS合成装置および放送システム
27日前
日本電気株式会社
ピーク抑圧装置及びピーク抑圧方法
10日前
日本電気株式会社
推定装置、推定方法及びプログラム
3日前
日本電気株式会社
システム及びマイグレーション方法
今日
日本電気株式会社
リング共振器、およびその製造方法
26日前
日本電気株式会社
推定装置、推定方法及びプログラム
3日前
日本電気株式会社
リング共振器、およびその製造方法
25日前
日本電気株式会社
処理装置、処理方法、及びプログラム
今日
日本電気株式会社
判定装置、判定方法、及び、プログラム
20日前
日本電気株式会社
予測システム、予測方法及びプログラム
3日前
日本電気株式会社
通信システム及びパケット順序補正方法
11日前
日本電気株式会社
管理システム、管理方法及びプログラム
10日前
日本電気株式会社
処理システム、処理方法およびプログラム
3日前
日本電気株式会社
映像処理装置、映像処理方法、プログラム
今日
日本電気株式会社
映像伝送装置、映像伝送方法、プログラム
今日
日本電気株式会社
情報処理装置、情報処理方法、プログラム
24日前
日本電気株式会社
画像検索装置、画像検索方法及び記憶媒体
21日前
日本電気株式会社
情報処理装置、情報処理方法、プログラム
27日前
日本電気株式会社
マルチコアファイバ増幅器及び光増幅方法
18日前
日本電気株式会社
情報処理装置、情報処理方法、プログラム
24日前
日本電気株式会社
情報処理システム、処理方法、プログラム
今日
日本電気株式会社
処理システム、処理方法、およびプログラム
今日
日本電気株式会社
処理システム、処理方法、およびプログラム
28日前
日本電気株式会社
人数計数装置、人数計数方法及びプログラム
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ