TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025142724
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024042240
出願日
2024-03-18
発明の名称
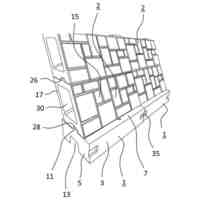
作業機械および作業機械の制御方法
出願人
日立建機株式会社
代理人
弁理士法人サンネクスト国際特許事務所
主分類
E02F
9/20 20060101AFI20250924BHJP(水工;基礎;土砂の移送)
要約
【課題】外部から制御指令を受け付ける外部制御インターフェイス部を備えた作業機械にオペレータの意図しない挙動が発生するリスクを低減する。
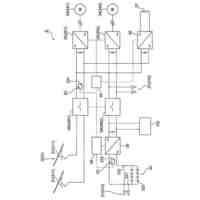
【解決手段】ロック装置の状態がアクチュエータの動作を許容させるロック解除状態に切替えられているときに、作業機械の操作装置からの操作指令と作業機械の外部から外部制御インターフェイス部が受けた制御指令とのいずれに応じてアクチュエータの制御を実行するかを切替える切替操作を切替装置が受け付けた場合には、作業機械は、所定の解除条件が成立するまで、アクチュエータの動作を停止させる自動停止制御を実行する。
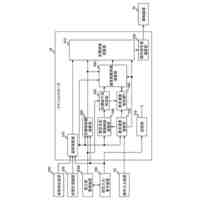
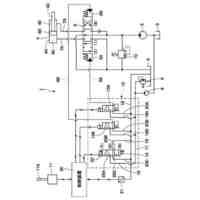
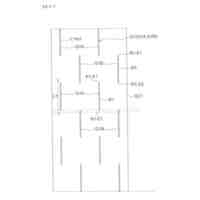
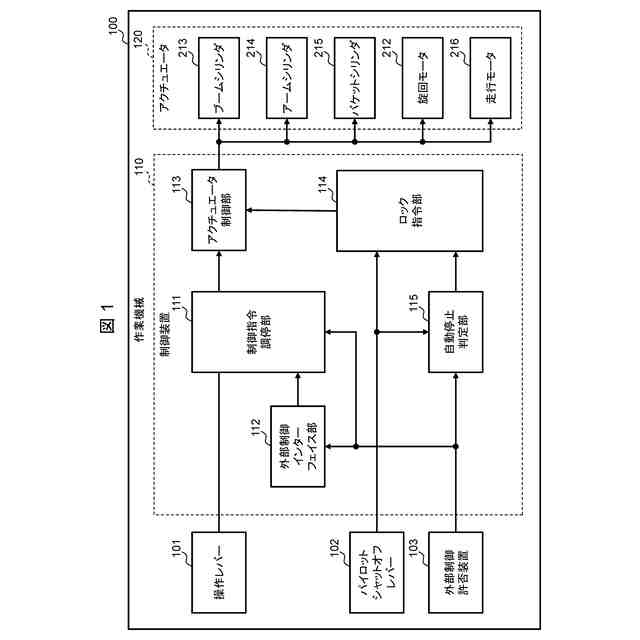
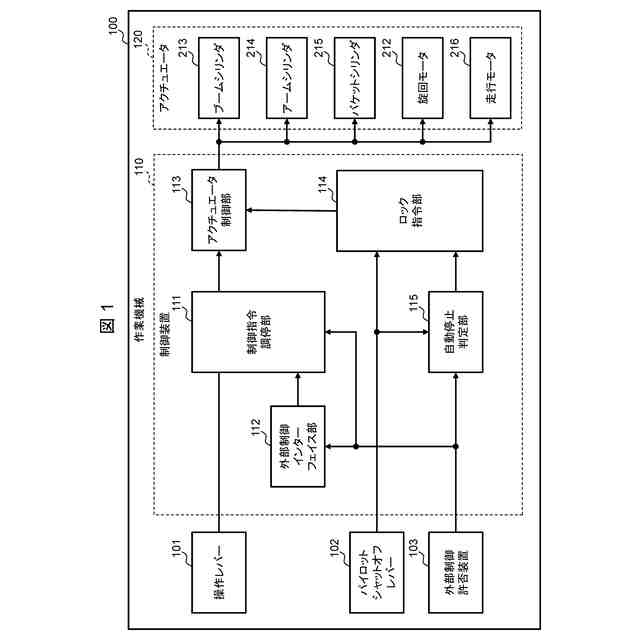
【選択図】図1
特許請求の範囲
【請求項1】
アクチュエータと、
前記アクチュエータの操作指令を操作量に応じて出力する操作装置と、
前記アクチュエータの動作をロックさせるロック状態と前記アクチュエータの動作を許容させるロック解除状態とを切替えるロック装置と、
前記アクチュエータを動作させる制御指令を外部から受け付ける外部制御インターフェイス部を有し、前記操作装置から出力された前記操作指令または前記外部制御インターフェイス制御部が受け付けた前記制御指令に応じて前記アクチュエータを制御する制御装置と、
前記制御装置による前記アクチュエータの制御を、前記操作装置からの前記操作指令と前記外部制御インターフェイスが受け付けた外部からの前記制御指令とのいずれに応じて実行するかを切替える切替操作を受け付ける切替装置と、を備えた作業機械において、
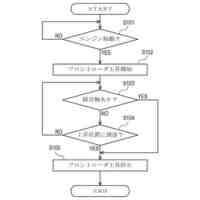
前記制御装置は、前記ロック装置によって前記ロック解除状態に切替えられているときに、前記切替装置が前記切替操作を受け付けた場合には、所定の解除条件が成立するまで、前記アクチュエータの動作を停止させる自動停止制御を実行することを特徴とする作業機械。
続きを表示(約 680 文字)
【請求項2】
前記所定の解除条件は、前記ロック装置が前記ロック状態に切替えられることを含む、
ことを特徴とする請求項1に記載の作業機械。
【請求項3】
前記ロック解除状態において、前記ロック装置が前記ロック状態への切替えを受け付けた場合、前記制御装置は、前記自動停止制御を無効化する、
請求項1に記載の作業機械。
【請求項4】
前記ロック装置が前記ロック解除状態への切替えを受け付けていて、前記自動停止制御が無効であり、前記外部制御インターフェイス部が有効である場合、前記制御装置は、前記ロック解除状態への切替えが受け付けられてからの経過時間であるロック解除経過が所定の時間を経過するまで、前記ロック状態を維持する、
請求項1に記載の作業機械。
【請求項5】
作業機械の外部から制御指令を受け付ける外部制御インターフェイス部を備え、作業機械の操作装置から出力された操作指令または前記外部から前記外部制御インターフェイス部が受けた制御指令に応じてアクチュエータを制御する作業機械の制御方法において、
前記作業機械の状態が、前記アクチュエータの動作を許容させるロック解除状態であるときに、前記作業機械の操作装置からの操作指令と前記作業機械の外部からの制御指令とのいずれに応じて前記アクチュエータを制御するかを切替える切替操作を受け付けた場合に、所定の解除条件が成立するまで、前記アクチュエータの動作を停止させる自動停止制御を実行する、
ことを特徴とする作業機械の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械および作業機械の制御方法に関わる。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
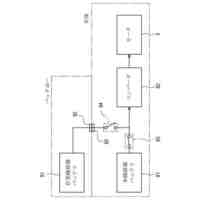
近年、土木または建設業界の人手不足を背景に、作業機械の遠隔制御または自動制御(以下、「遠隔自動制御」と呼ぶ)に注目が集まっている。作業機械の遠隔自動制御を実現するにあたり、作業機械を直接改造するのではなく、作業機械のアクチュエータ制御機能をAPI(Application Programming Interface)を介して外部に開放する方式がある。この方式では、車載のヒューマンインターフェイスに代わり、外部からの制御指令に応じて作業機械を制御する機能であるインターフェイス部(外部制御インターフェイス部)が予め作業機械に設けられる。遠隔自動制御指令を生成する外部制御装置が、作業現場または作業内容などに合わせて構築され、且つ、作業機械に接続される。これにより、遠隔自動制御システムが実現される。作業機械の遠隔制御は、作業機械の外部にあるコンピュータまたは遠隔オペレータにより行われる。
【0003】
作業機械の例として、建設車両がある。作業機械が遠隔自動制御下にあったとしても、動作確認や運行の監視のため、搭乗オペレータが作業機械に搭乗する場合がある。
【0004】
搭乗オペレータが搭乗している場合の自動制御システムに関する背景技術として、例えば、国際公開第2019/181872号パンフレット(特許文献1)、および、特開2021-139143号公報(特許文献2)がある。
【0005】
特許文献1には、「前記制御装置は、前記上部旋回体に設置されている運転室内に設けられた第1スイッチが操作されたときに、前記複合動作を自律的に実行するように構成されている」と記載されている。
【0006】
特許文献2には、「作業機と、前記作業機を設計情報に従い自動制御する自動制御装置と、前記作業機を手動制御する操作レバーと、前記操作レバーに装着され、前記自動制御の有効と無効を択一的に切り替える自動スイッチとを備え、前記作業機の手動制御は、前記自動制御に優先されることを特徴とする」と記載されている。
【先行技術文献】
【特許文献】
【0007】
国際公開第2019/181872号パンフレット
特開2021-139143号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
作業機械は、作業機械の操作装置からの操作指令と作業機械の外部からの制御指令とのいずれに応じてアクチュエータの制御を実行するか(つまり外部制御インターフェイス部の無効化と有効化)を切替える切替操作を受け付ける切替装置を有する。作業機械のアクチュエータの制御を外部からの制御指令に応答して実行させるためには、外部制御インターフェイス部を有効化するための切替操作を切替装置が受け付ける必要がある。
【0009】
加えて、遠隔自動制御下の作業機械を搭乗オペレータが利用する場合、搭乗オペレータの意思による操作を優先させるために、搭乗オペレータが遠隔自動制御を一時停止できることが望ましい。
【0010】
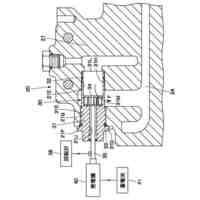
一般的な作業機械においては、アクチュエータの動作をロックさせるロック状態とアクチュエータの動作を許容させるロック解除状態とを切替えるロック装置が備えられている。作業機械がロック状態である場合、搭乗オペレータが作業レバーへ意図せず接触しても、アクチュエータの意図しない挙動の発生を防ぐことができる。このロック装置を遠隔自動制御の一時的な停止手段として利用することが考えられる。ロック装置により作業機械のロック状態を解除することで、遠隔から作業機械を制御することができるようになる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
2日前
日立建機株式会社
作業機械
2か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
6日前
日立建機株式会社
作業機械
20日前
日立建機株式会社
情報処理装置
1か月前
日立建機株式会社
油圧システム
2日前
日立建機株式会社
電動式作業機械
2か月前
日立建機株式会社
充電支援システム
1か月前
日立建機株式会社
分別回収システム
2日前
日立建機株式会社
部品需要予測装置
1か月前
日立建機株式会社
建設機械の作業装置
12日前
日立建機株式会社
スプライン連結装置
2日前
日立建機株式会社
建設機械の下部走行体
5日前
日立建機株式会社
地形情報管理システム
2日前
日立建機株式会社
制御弁装置および作業機械
1か月前
日立建機株式会社
作業機械の位置推定システム
12日前
日立建機株式会社
カウンタウエイト及び作業機械
1か月前
日本信号株式会社
光検知システム
2か月前
日立建機株式会社
作業機械および作業機械の制御方法
今日
日立建機株式会社
木材チップ搬出装置及び木材チップ詰め込み機
21日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
電動式建設機械
1か月前
日立建機株式会社
減速機の評価システムおよび評価システムを搭載した油圧ショベル
2日前
日立建機株式会社
ダンプトラックおよび給電システム
1か月前
日立建機株式会社
周囲監視システム、および、それを備える作業機械
14日前
個人
鋼管
13日前
FKS株式会社
擁壁
2日前
株式会社クボタ
作業車
今日
株式会社クボタ
作業車
今日
株式会社奥村組
ケーソン工法
5日前
株式会社武井工業所
積みブロック
22日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ