TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025144598
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024044317
出願日
2024-03-20
発明の名称
搬送システム、ロボットハンド
出願人
株式会社デンソーウェーブ
代理人
個人
主分類
B25J
15/08 20060101AFI20250926BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】、搬送システムの導入によって生じるケースの配置に係る制約を緩和すること。
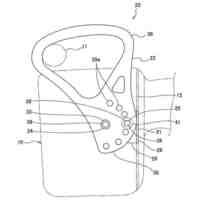
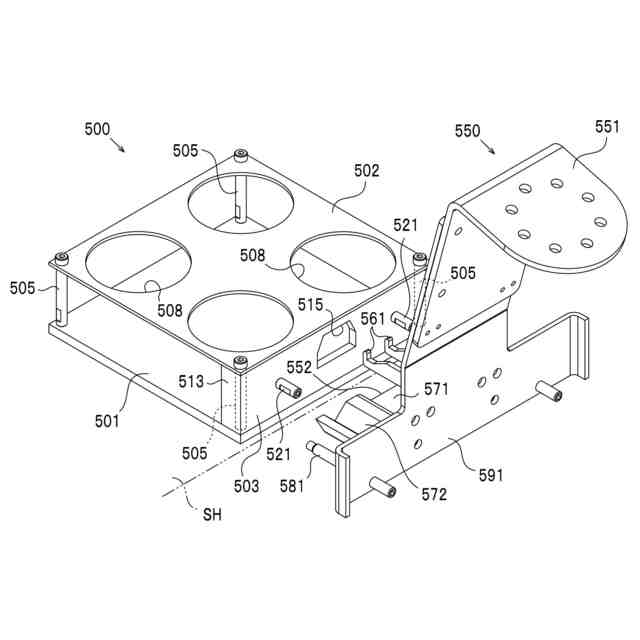
【解決手段】搬送ロボットのアームには、ビーカ等の器具がセットされるトレー500を搬送に際して支持するためのハンド550が装着されている。ハンド550は、トレー500の壁面部503に形成された開口部515に挿入され、当該開口部515に挿入された状態で壁面部503の内面に引っ掛かる鉤部材561と、鉤部材561よりも下側に設けられており、壁面部503の外面に当接することで鉤部材561と壁面部503との引っ掛かり箇所を中心とするトレー500の回動を規制するストッパ部材581とを備えている。鉤部材561を壁面部503に引っ掛けた状態で壁面部503を持ち上げる際に、ストッパ部材581により回動を規制することで、壁面部502の手前側からトレー500を支持する。
【選択図】 図39
特許請求の範囲
【請求項1】
複数の物品が収容又は設置されるケースを搬送ロボットにより搬送する搬送システムであって、
前記搬送ロボットには、前記搬送に際して前記ケースを支持可能な支持部が設けられており、
前記支持部は、
前記ケースの一側部に形成された挿入部に挿入され、当該挿入部に挿入された状態で挿入方向における奥側から当該一側部に引っ掛かる爪部と、
前記爪部よりも下側に設けられており、前記一側部に当該一側部の手前側から当接することで前記爪部と前記一側部との引っ掛かり箇所を中心とする前記ケースの回動を規制する規制部と
を有し、
前記爪部を前記一側部に引っ掛けた状態で当該一側部を持ち上げる際に、前記引っ掛かり箇所を中心とする前記ケースの回動を前記規制部により規制することで前記ケースを前記一側部の手前側から支持するように構成されている搬送システム。
続きを表示(約 530 文字)
【請求項2】
前記ケースの前記一側部における前記爪部との引っ掛かり箇所が前記一側部における上端寄りの箇所となり且つ前記一側部における前記規制部との当接箇所が前記一側部における下端寄りの箇所となるように構成されている請求項1に記載の搬送システム。
【請求項3】
前記支持部は、前記ケースを支持している場合に、前記ケースの平面視において前記規制部が前記爪部の両側にて前記一側部に当接した状態となるように構成されている請求項1又は請求項2に記載の搬送システム。
【請求項4】
複数の物品が収容又は設置されるケースを搬送する搬送ロボットに適用され、当該搬送に際して前記ケースを支持する支持部が有するロボットハンドであって、
前記支持部は、
前記ケースの一側部に形成された挿入部に挿入され、前記ケースを支持するとともに挿入方向における奥側から当該ケースに引っ掛かる爪部と、
前記爪部よりも下側に設けられており、前記一側部に形成された受け部に前記挿入方向における手前側から当接することで前記爪部と前記ケースとの引っ掛かり箇所を中心とした当該ケースの回動を規制する規制部と
を有しているロボットハンド。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送システム及びロボットハンドに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
搬送ロボットを用いた搬送システムには、ワーク等が収容されたトレーや通箱等のケースを棚やパレットから取り出して、作業スペース等へ搬送するように構成されたものがある。この種の搬送システムにおいては、例えば特許文献1に示すように、左右一対の爪を箱の対辺部分に各々引っ掛けて当該箱を保持するように構成されたものが提案されている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開平6-206634号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した搬送システムでは、ケースを保持する際にケースの上側や左右両側に上記爪等を挿入するための動作スペースを確保する必要があり、ケースを並べて配置する場合にはケースの配置に係る制約が強くなる。特に、棚等にケースを収容する場合には、動作スペースの確保によって空間効率が低下し、実質的に収容可能なケースの数が減少するといった不都合が生じ得る。このように、搬送ロボットによりケースを搬送する搬送システムにおいては、ケースの配置を密にして空間効率を向上させる上で、ケースの搬送に係る構成に未だ改善の余地がある。
【0005】
本発明は、上記例示した課題等に鑑みてなされたものであり、その主たる目的は、搬送システムの導入によって生じるケースの配置に係る制約を緩和することにある。
【課題を解決するための手段】
【0006】
第1の手段.複数の物品が収容又は設置されるケースを搬送ロボットにより搬送する搬送システムであって、
前記搬送ロボットには、前記搬送に際して前記ケースを支持可能な支持部が設けられており、
前記支持部は、
前記ケースの一側部に形成された挿入部に挿入され、当該挿入部に挿入された状態で挿入方向における奥側から当該一側部に引っ掛かる爪部と、
前記爪部よりも下側に設けられており、前記一側部に当該一側部の手前側から当接することで前記爪部と前記一側部との引っ掛かり箇所を中心とする前記ケースの回動を規制する規制部と
を有し、
前記爪部を前記一側部に引っ掛けた状態で当該一側部を持ち上げる際に、前記引っ掛かり箇所を中心とする前記ケースの回動を前記規制部により規制することで前記ケースを前記一側部の手前側から支持するように構成されている。
【0007】
本手段に示す構成によれば、ケースの一側部の手前側から当該ケースを支持可能であり、ケースを支持する際に必要となる搬送ロボット用の動作領域、すなわちケースへアプローチする際の動作領域の確保が容易となる。つまり、棚等にケースを並べる際に、左右のケース間の隙間が小さかったりケース上方に位置する仕切りや天板等との隙間が小さかったりする場合であっても、当該ケースの取り出しを簡易に実現できる。言い換えれば、棚等においてケースを密に配置することができ、収容可能なケースの数を多くすることができる。上述したような搬送ロボットの導入によって実験工程等の一部を自動化することは、作業者の労力軽減を図る上で好ましいものの、当該搬送ロボットの導入によって収容可能なケースの数が減ることは自動化による恩恵を小さくする要因となり得る。本手段に示す構成によれば、そのような懸念を好適に解消できる。
【0008】
第2の手段.複数の物品が収容又は設置されるケースを搬送する搬送ロボットに適用され、当該搬送に際して前記ケースを支持する支持部が有するロボットハンドであって、
前記支持部は、
前記ケースの一側部に形成された挿入部に挿入され、前記ケースを支持するとともに挿入方向における奥側から当該ケースに引っ掛かる爪部と、
前記爪部よりも下側に設けられており、前記一側部に形成された受け部に前記挿入方向における手前側から当接することで前記爪部と前記ケースとの引っ掛かり箇所を中心とした当該ケースの回動を規制する規制部と
を有している。
【0009】
本手段に示す構成によれば、ケースの配置に係る制約を好適に緩和できる。
【図面の簡単な説明】
【0010】
第1の実施形態におけるロボットシステムを示す斜視図。
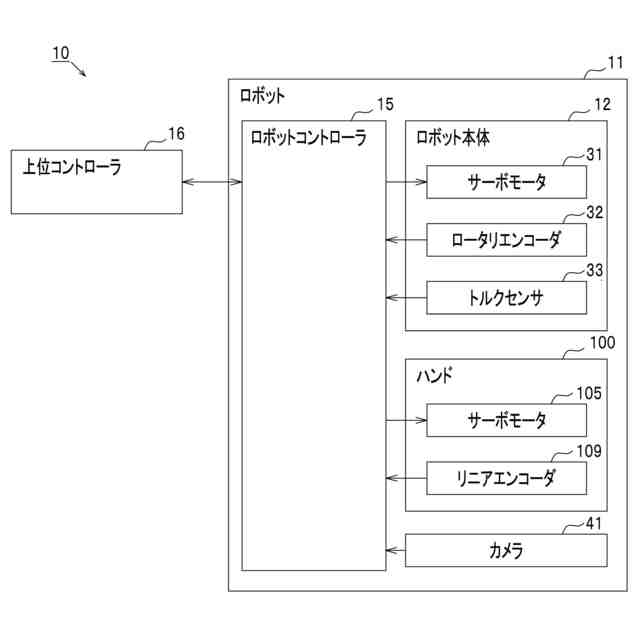
ロボットシステムの電気的構成を示すブロック図。
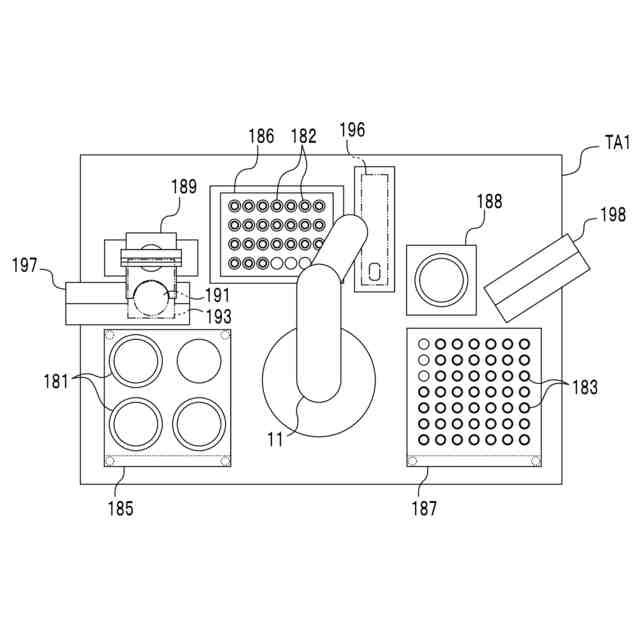
ロボットが設置されたテーブルを示す概略図。
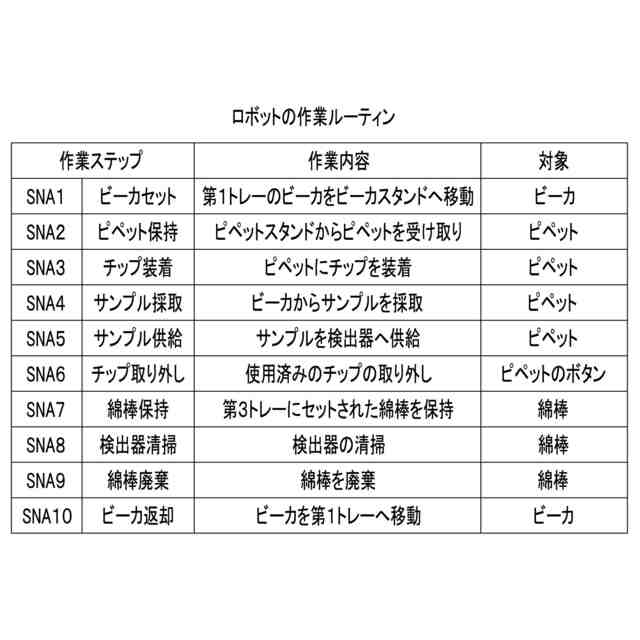
ロボットが従事している作業の流れを示す概略図。
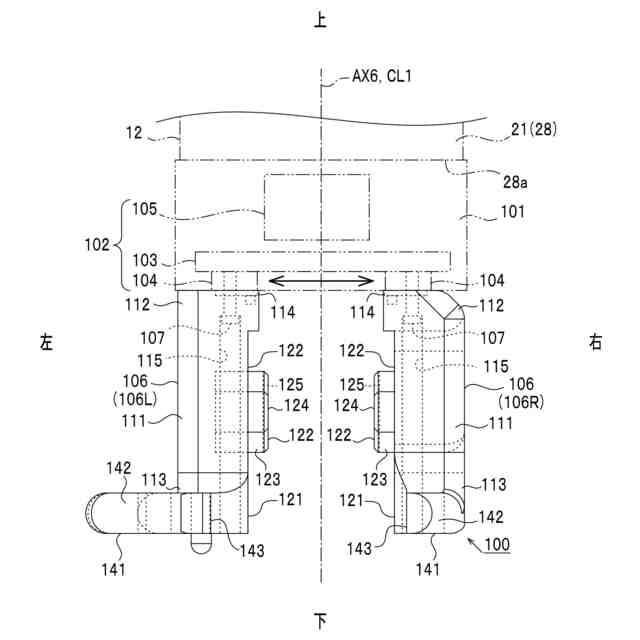
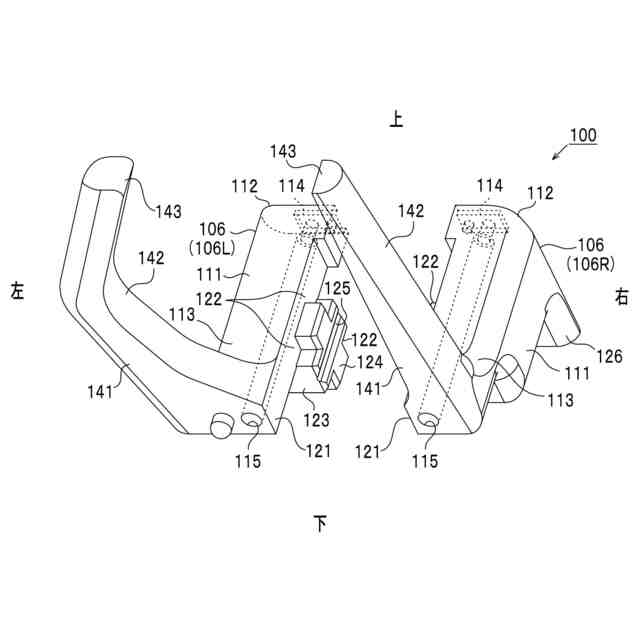
ハンドの正面図。
ハンドを斜め下方から見た斜視図。
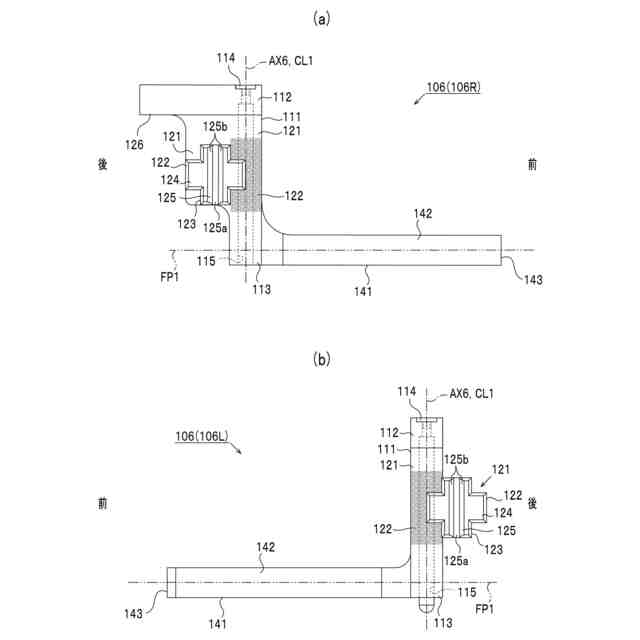
(a)右側の挟持部材の左側面図、(b)左側の挟持部材の右側面図。
ビーカを保持した状態を示す概略図。
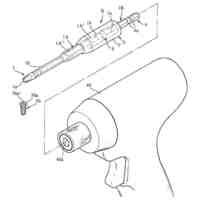
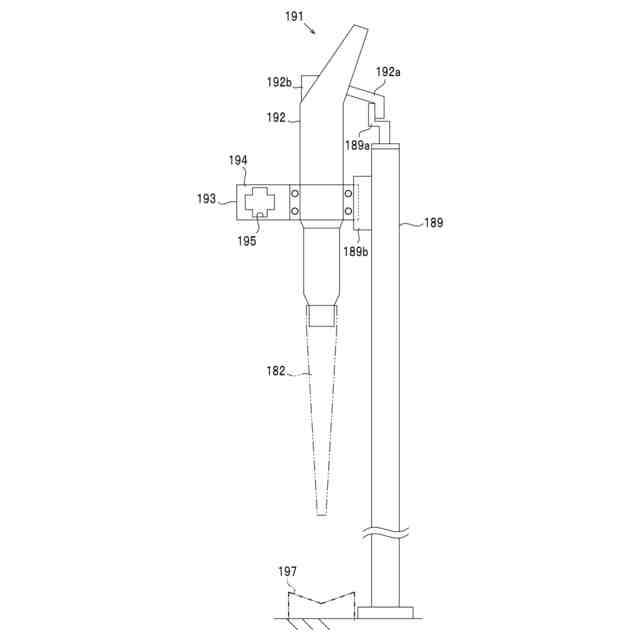
ピペット及びピペットスタンドを示す概略図。
ピペットの保持の流れを示す概略図。
チップの取り外しの流れを示す概略図。
綿棒の保持の流れを示す概略図。
変形例を示す概略図。
第2の実施形態におけるロボット及びテーブルを示す概略図。
ロボットが従事している作業の流れを示す概略図。
ハンドの背面図。
ハンドを斜め後方から見た斜視図。
ビーカを保持した状態を示す概略図。
ダイヤルを挟んだ状態を示す概略図。
ダイヤル操作の流れを示す概略図。
変形例を示す概略図。
第3の実施形態におけるロボット及びテーブルを示す概略図。
ロボットが従事している作業の流れを示す概略図。
ハンドの正面図。
右側の挟持部材の左側面図。
ハンドを下側から見た斜視図。
ビーカを保持した状態を示す概略図。
注射器のプランジャを保持した状態を示す概略図。
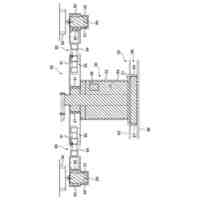
図28のA-A線部分断面図。
注射器のシリンジを保持した状態を示す概略図。
注射器のシリンジを保持した状態を示す概略図。
注射器のフィルタを保持した状態を示す概略図。
図32のB-B線部分断面図。
フィルタの取り付けの流れを示す概略図。
フィルタの取り付けの流れを示す概略図。
第4の実施形態における実験室を示す概略図。
搬送ロボットの側面図。
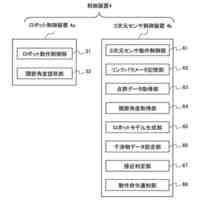
搬送システムの電気的構成を示すブロック図。
ハンド及びトレーを示す斜視図。
トレーの正面図。
トレーの側面図。
ハンドの側面図。
ハンドの平面図。
トレーの搬送の流れを示す概略図。
変形例を示す概略図。
変形例を示す概略図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
27日前
株式会社三協システム
製函機
25日前
川崎重工業株式会社
ロボット
4日前
株式会社三協システム
移載装置
24日前
株式会社竹中工務店
補助セット
3日前
CKD株式会社
把持装置
26日前
株式会社不二越
ロボット
3日前
株式会社不二越
ロボット操作装置
1か月前
株式会社不二越
ロボットシステム
1か月前
太陽パーツ株式会社
アシストスーツ
27日前
株式会社ミクロブ
把持装置
26日前
日本精工株式会社
締結用工具
1か月前
SMC株式会社
着脱装置
25日前
ARMA株式会社
ジョイントフレーム
1か月前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
移動ロボットシステム
6日前
株式会社不二越
エッジ仕上げ装置
16日前
本田技研工業株式会社
装置
9日前
株式会社不二越
ロボットシステム
27日前
株式会社不二越
ロボットシステム
24日前
株式会社不二越
垂直多関節ロボット
17日前
積水ハウス株式会社
フィルム除去具
2か月前
トヨタ自動車株式会社
歩行ロボット
1か月前
ライオン株式会社
移載システム
18日前
シンフォニアテクノロジー株式会社
搬送装置
6日前
株式会社不二越
協働ロボットシステム
2か月前
大和ハウス工業株式会社
ねじ回転工具
25日前
ダイハツ工業株式会社
移載治具
1か月前
アネックスツール株式会社
ドライバービット
2日前
ワールド技研株式会社
ロボットセル装置
3日前
株式会社不二越
ロボットシステム
1か月前
株式会社清水製作所
電動工具の吊下げ具
2か月前
トヨタ自動車株式会社
ロボットの制御装置
2日前
セイコーエプソン株式会社
ロボット
1か月前
セイコーエプソン株式会社
ロボット
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ