TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025145852
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024046312
出願日
2024-03-22
発明の名称
部品挿入方法、制御装置、及び制御プログラム
出願人
日本電気株式会社
,
NECプラットフォームズ株式会社
代理人
個人
主分類
B25J
13/08 20060101AFI20250926BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】円筒状部材を穴内に効率的に挿入すること。
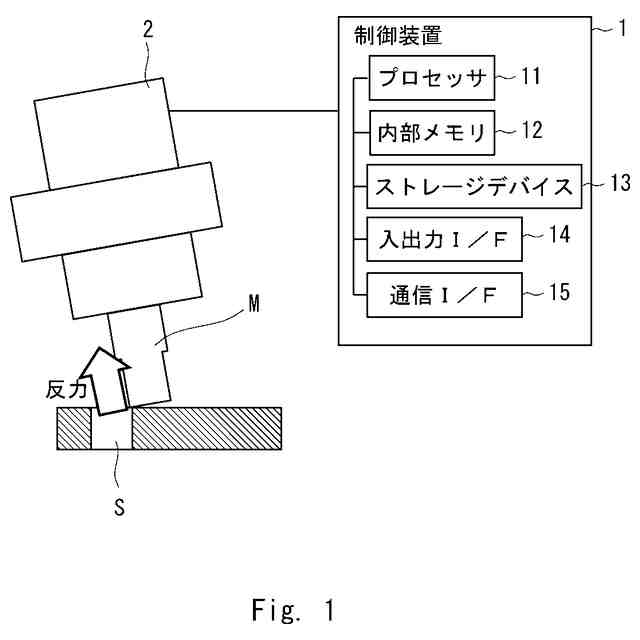
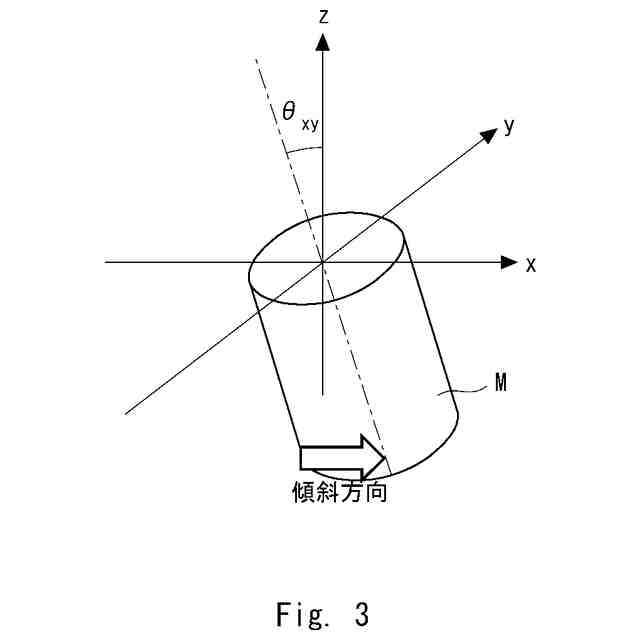
【解決手段】部品挿入方法は、ロボットアームにより、円筒状部材を保持し、該保持した円筒状部材を穴の軸線に対し傾斜させるステップと、ロボットアームにより、傾斜した円筒状部材を移動させ、円筒状部材の先端部の円周状端縁を、穴の円周状開口縁に当接させるステップと、ロボットアームにより、円筒状部材の円周状端縁が穴の円周状開口縁から受ける反力の方向であって、穴の円周状開口縁を含む平面に平行な反力の方向に応じて、円筒状部材を穴の円周状開口縁に沿って平面に平行に所定荷重を付加しつつ移動させ、円筒状部材の挿入開始位置で移動を停止させるステップと、ロボットアームにより、挿入開始位置で円筒状部材を穴に挿入させるステップと、含む。
【選択図】図2
特許請求の範囲
【請求項1】
ロボットアームにより、円筒状部材を保持し、該保持した円筒状部材を穴の軸線に対し傾斜させるステップと、
前記ロボットアームにより、該傾斜した円筒状部材を移動させ、該円筒状部材の先端部の円周状端縁を、前記穴の円周状開口縁に当接させるステップと、
前記ロボットアームにより、前記円筒状部材の円周状端縁が前記穴の円周状開口縁から受ける反力の方向であって、前記穴の円周状開口縁を含む平面に平行な該反力の方向に応じて、前記円筒状部材を前記穴の円周状開口縁に沿って前記平面に平行に所定荷重を付加しつつ移動させ、前記円筒状部材の挿入開始位置で該移動を停止させるステップと、
前記ロボットアームにより、前記挿入開始位置で前記円筒状部材を前記穴に挿入させるステップと、
含む、
部品挿入方法。
続きを表示(約 2,700 文字)
【請求項2】
請求項1記載の部品挿入方法であって、
前記円筒状部材の先端部の円周状端縁と前記穴の円周状開口縁とが2点で当接した場合に、前記円筒状部材を前記円筒状部材の傾斜方向と反対方向に直線的に移動させ、
前記円筒状部材の先端部の円周状端縁と前記穴の円周状開口縁とが1点で当接し、かつ、前記円筒状部材の傾斜方向と前記反力の前記傾斜方向の成分の方向が異なる場合、前記円筒状部材を該円筒状部材の傾斜方向と反対方向に直線的に移動させた後、前記穴の円周状開口縁に沿って円弧状に移動させ、
前記円筒状部材の先端部の円周状端縁と前記穴の円周状開口縁とが1点で当接し、かつ、前記円筒状部材の傾斜方向と前記反力の前記傾斜方向の成分の方向が同一である場合、前記円筒状部材を前記穴の円周状開口縁に沿って円弧状に移動させる、
部品挿入方法。
【請求項3】
請求項1記載の部品挿入方法であって、
前記挿入開始位置において、前記円筒状部材を前記穴に対し所定量だけ上昇させ、該円筒状部材を回転させることで該円筒状部材の軸線と穴の軸線とを平行した後、前記円筒状部材を前記穴に挿入させる、
部品挿入方法。
【請求項4】
請求項1記載の部品挿入方法であって、
前記円筒状部材の傾斜方向と、前記円筒状部材と穴との接点における反力方向と、が同一となる位置を前記挿入開始位置とし、前記ロボットアームにより、前記挿入開始位置で前記円筒状部材を前記穴に挿入させる、
部品挿入方法。
【請求項5】
円筒状部材を保持し移動させるロボットアームと、
前記ロボットアームの動作を制御する制御手段と、を備え、
前記制御手段は、前記円筒状部材を保持し、該保持した円筒状部材を穴の軸線に対して斜めに傾斜させ、
該傾斜した円筒状部材を移動させ、該円筒状部材の先端部の円周状端縁を、前記穴の円周状開口縁に当接させ、
前記円筒状部材の円周状端縁が前記穴の円周状開口縁から受ける反力の方向であって、前記穴の円周状開口縁を含む平面に平行な該反力の方向に応じて、前記円筒状部材を前記穴の円周状開口縁に沿って前記平面に平行に所定荷重を付加しつつ移動させ、前記円筒状部材の挿入開始位置で該移動を停止させ、
前記挿入開始位置で前記円筒状部材を前記穴に挿入させる、
ように前記ロボットアームの動作を制御する、
ロボット制御装置。
【請求項6】
円筒状部材を穴の軸線に対し傾斜させるようロボットアームを制御する処理と、
傾斜した円筒状部材を移動させ、該円筒状部材の先端部の円周状端縁を、前記穴の円周状開口縁に当接させるように前記ロボットアームを制御する処理と、
前記円筒状部材の円周状端縁が前記穴の円周状開口縁から受ける反力の方向であって、前記穴の円周状開口縁を含む平面に平行な該反力の方向に応じて、前記円筒状部材を前記穴の円周状開口縁に沿って前記平面に平行に所定荷重を付加しつつ移動させ、前記円筒状部材の挿入開始位置で該移動を停止させるように前記ロボットアームを制御する処理と、
前記挿入開始位置で前記円筒状部材を前記穴に挿入させる前記ロボットアームを制御する処理と、
をコンピュータに実行させる制御プログラム。
【請求項7】
ロボットアームにより円筒状部材を保持し、該保持した円筒状部材を穴の軸線に対し傾斜させるステップと、
前記ロボットアームにより、該傾斜した円筒状部材を移動させて、該円筒状部材の先端部の円周状端縁を、前記穴の円周状開口縁に当接させるステップと、
前記ロボットアームにより、前記円筒状部材の円周状端縁が前記穴から受ける反力の方向であって、前記穴の円周状開口縁を含む平面に平行な該反力の方向、および、該平面に垂直方向かつ前記穴に接近する方向に、前記円筒状部材を所定荷重付加しつつ移動させ、前記円筒状部材の挿入開始位置で該移動を停止させるステップと、
前記ロボットアームにより、前記挿入開始位置で前記円筒状部材を前記穴に挿入させるステップと、
含む、
部品挿入方法。
【請求項8】
請求項7記載の部品挿入方法であって、
前記挿入開始位置において、前記円筒状部材を前記穴に対し所定量だけ上昇させ、該円筒状部材を回転させることで該円筒状部材の軸線と穴の軸線とを平行した後、前記円筒状部材を前記穴に挿入させる、
部品挿入方法。
【請求項9】
円筒状部材を保持し移動させるロボットアームと、
前記ロボットアームの動作を制御する制御手段と、を備え、
前記制御手段は、
前記円筒状部材を保持し、該保持した円筒状部材を穴の軸線に対して斜めに傾斜させ、
該傾斜した円筒状部材を移動させて、該円筒状部材の先端部の円周状端縁を、前記穴の円周状開口縁に当接させ、
前記円筒状部材の円周状端縁が前記穴から受ける反力の方向であって、前記穴の円周状開口縁を含む平面に平行な該反力の方向、および、該平面に垂直方向かつ前記穴に接近する方向に、前記円筒状部材を所定荷重付加しつつ移動させ、前記円筒状部材の挿入開始位置で該移動を停止させ、
前記挿入開始位置で前記円筒状部材を前記穴に挿入させる、
ように前記ロボットアームの動作を制御する、
ロボット制御装置。
【請求項10】
円筒状部材を穴の軸線に対して斜めに傾斜させるようにロボットアームを制御する処理と、
該傾斜した円筒状部材を移動させて、該円筒状部材の先端部の円周状端縁を、前記穴の円周状開口縁に当接させるように前記ロボットアームを制御する処理と、
前記ロボットアームにより、前記円筒状部材の円周状端縁が前記穴から受ける反力の方向であって、前記穴の円周状開口縁を含む平面に平行な該反力の方向、および、該平面に垂直方向かつ前記穴に接近する方向に、前記円筒状部材を所定荷重付加しつつ移動させ、前記円筒状部材の挿入開始位置で該移動を停止させるように前記ロボットアームを制御する処理と、
前記ロボットアームにより、前記挿入開始位置で前記円筒状部材を前記穴に挿入させるように前記ロボットアームを制御する処理と、
をコンピュータに実行させる、
制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、部品挿入方法、制御装置、及び制御プログラムに関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
ロボットアームにより保持した円筒状部材を穴の軸線に対して斜めに傾斜させた状態で、挿入開始位置まで階段状に移動させて、その穴内に挿入する部品挿入方法が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開昭61-019523号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記部品挿入方法においては、円筒状部材を挿入開始位置まで階段状に移動させるため、無駄な動作を行うことになり効率が悪い。
【0005】
本開示の目的は、上述した課題のいずれかを解決する部品挿入方法、制御装置、及び制御プログラムを提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するための本開示の一態様は、
ロボットアームにより、円筒状部材を保持し、該保持した円筒状部材を穴の軸線に対し傾斜させるステップと、
前記ロボットアームにより、該傾斜した円筒状部材を移動させ、該円筒状部材の先端部の円周状端縁を、前記穴の円周状開口縁に当接させるステップと、
前記ロボットアームにより、前記円筒状部材の円周状端縁が前記穴の円周状開口縁から受ける反力の方向であって、前記穴の円周状開口縁を含む平面に平行な該反力の方向に応じて、前記円筒状部材を前記穴の円周状開口縁に沿って前記平面に平行に所定荷重を付加しつつ移動させ、前記円筒状部材の挿入開始位置で該移動を停止させるステップと、
前記ロボットアームにより、前記挿入開始位置で前記円筒状部材を前記穴に挿入させるステップと、
含む、
部品挿入方法
である。
上記目的を達成するための本開示の一態様は、
円筒状部材を保持し移動させるロボットアームと、
前記ロボットアームの動作を制御する制御手段と、を備え、
前記制御手段は、前記円筒状部材を保持し、該保持した円筒状部材を穴の軸線に対して斜めに傾斜させ、
該傾斜した円筒状部材を移動させ、該円筒状部材の先端部の円周状端縁を、前記穴の円周状開口縁に当接させ、
前記円筒状部材の円周状端縁が前記穴の円周状開口縁から受ける反力の方向であって、前記穴の円周状開口縁を含む平面に平行な該反力の方向に応じて、前記円筒状部材を前記穴の円周状開口縁に沿って前記平面に平行に所定荷重を付加しつつ移動させ、前記円筒状部材の挿入開始位置で該移動を停止させ、
前記挿入開始位置で前記円筒状部材を前記穴に挿入させる、
ように前記ロボットアームの動作を制御する、
ロボット制御装置
である。
上記目的を達成するための本開示の一態様は、
円筒状部材を穴の軸線に対し傾斜させるようロボットアームを制御する処理と、
傾斜した円筒状部材を移動させ、該円筒状部材の先端部の円周状端縁を、前記穴の円周状開口縁に当接させるように前記ロボットアームを制御する処理と、
前記円筒状部材の円周状端縁が前記穴の円周状開口縁から受ける反力の方向であって、前記穴の円周状開口縁を含む平面に平行な該反力の方向に応じて、前記円筒状部材を前記穴の円周状開口縁に沿って前記平面に平行に所定荷重を付加しつつ移動させ、前記円筒状部材の挿入開始位置で該移動を停止させるように前記ロボットアームを制御する処理と、
前記挿入開始位置で前記円筒状部材を前記穴に挿入させる前記ロボットアームを制御する処理と、
をコンピュータに実行させる制御プログラム
である。
上記目的を達成するための本開示の一態様は、
ロボットアームにより円筒状部材を保持し、該保持した円筒状部材を穴の軸線に対し傾斜させるステップと、
前記ロボットアームにより、該傾斜した円筒状部材を移動させて、該円筒状部材の先端部の円周状端縁を、前記穴の円周状開口縁に当接させるステップと、
前記ロボットアームにより、前記円筒状部材の円周状端縁が前記穴から受ける反力の方向であって、前記穴の円周状開口縁を含む平面に平行な該反力の方向、および、該平面に垂直方向かつ前記穴に接近する方向に、前記円筒状部材を所定荷重付加しつつ移動させ、前記円筒状部材の挿入開始位置で該移動を停止させるステップと、
前記ロボットアームにより、前記挿入開始位置で前記円筒状部材を前記穴に挿入させるステップと、
含む、
部品挿入方法
である。
上記目的を達成するための本開示の一態様は、
円筒状部材を保持し移動させるロボットアームと、
前記ロボットアームの動作を制御する制御手段と、を備え、
前記制御手段は、
前記円筒状部材を保持し、該保持した円筒状部材を穴の軸線に対して斜めに傾斜させ、
該傾斜した円筒状部材を移動させて、該円筒状部材の先端部の円周状端縁を、前記穴の円周状開口縁に当接させ、
前記円筒状部材の円周状端縁が前記穴から受ける反力の方向であって、前記穴の円周状開口縁を含む平面に平行な該反力の方向、および、該平面に垂直方向かつ前記穴に接近する方向に、前記円筒状部材を所定荷重付加しつつ移動させ、前記円筒状部材の挿入開始位置で該移動を停止させ、
前記挿入開始位置で前記円筒状部材を前記穴に挿入させる、
ように前記ロボットアームの動作を制御する、
ロボット制御装置
である。
上記目的を達成するための本開示の一態様は、
円筒状部材を穴の軸線に対して斜めに傾斜させるようにロボットアームを制御する処理と、
該傾斜した円筒状部材を移動させて、該円筒状部材の先端部の円周状端縁を、前記穴の円周状開口縁に当接させるように前記ロボットアームを制御する処理と、
前記ロボットアームにより、前記円筒状部材の円周状端縁が前記穴から受ける反力の方向であって、前記穴の円周状開口縁を含む平面に平行な該反力の方向、および、該平面に垂直方向かつ前記穴に接近する方向に、前記円筒状部材を所定荷重付加しつつ移動させ、前記円筒状部材の挿入開始位置で該移動を停止させるように前記ロボットアームを制御する処理と、
前記ロボットアームにより、前記挿入開始位置で前記円筒状部材を前記穴に挿入させるように前記ロボットアームを制御する処理と、
をコンピュータに実行させる、
【発明の効果】
【0007】
本開示によれば、上述した課題のいずれかを解決する部品挿入方法、制御装置、及び制御プログラムを提供することができる。
【図面の簡単な説明】
【0008】
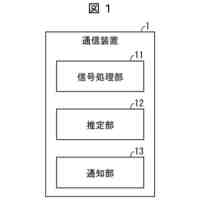
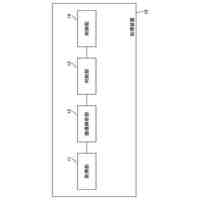
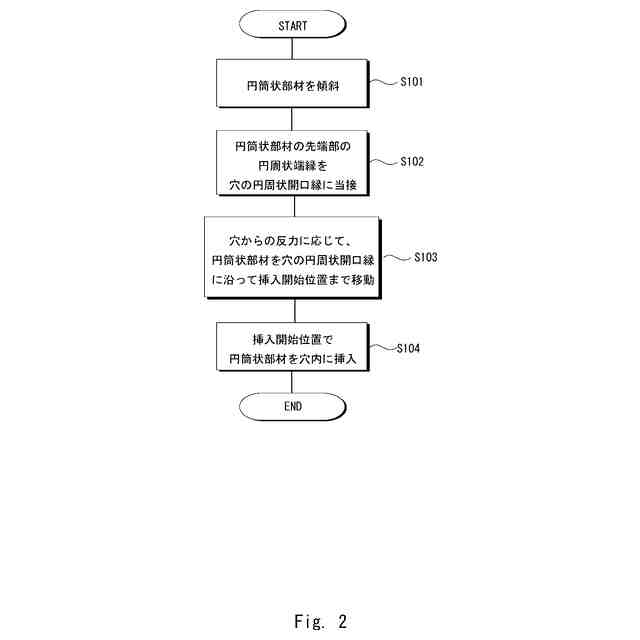
制御装置の構成例を示す図である。
制御方法のフローの一例を示すフローチャートである。
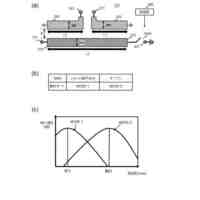
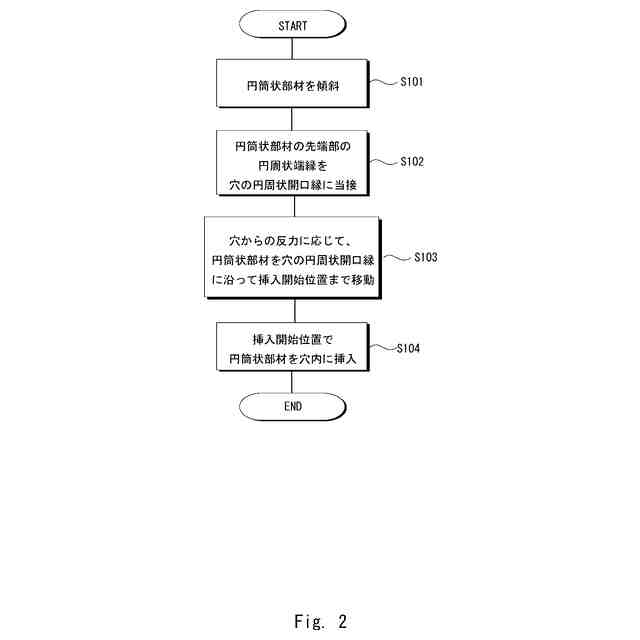
円筒状部材の傾斜を示す図である。
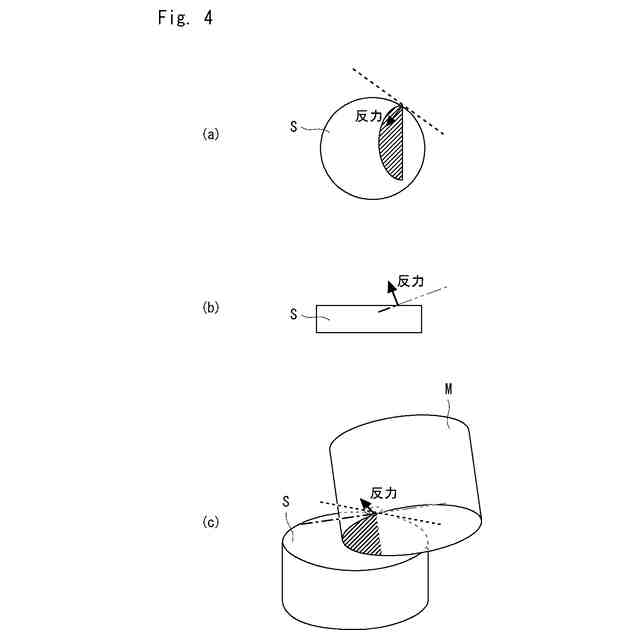
円筒状部材の反力を示す図である。
Z位置変位を示す図である。
穴位置探索を示す図である。
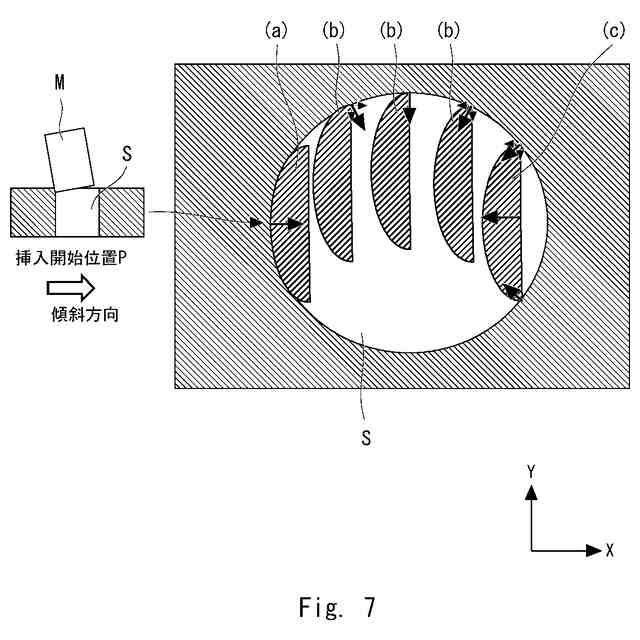
挿入開始位置を示す図である。
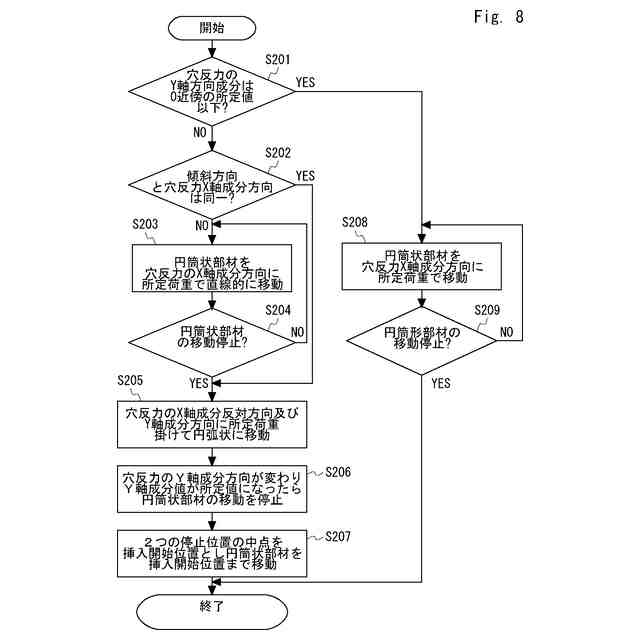
円筒状部材を当接位置から挿入開始位置まで移動させる際の制御処理フローを示すフローチャートである。
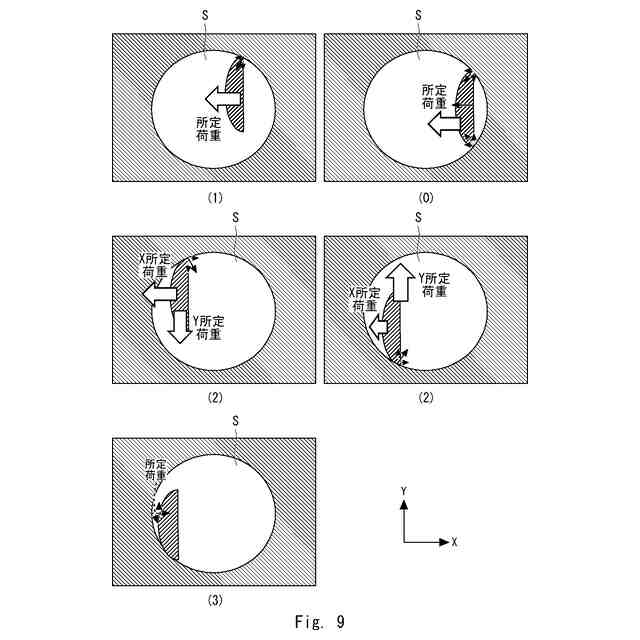
円筒状部材が当接位置から挿入開始位置まで移動する状態を示す図である。
円筒状部材の移動方法を示す図である。
円筒状部材を挿入開始位置から穴内に挿入する方法を示す図である。
円筒状部材を挿入開始位置から穴内に挿入する方法を示す図である。
【発明を実施するための形態】
【0009】
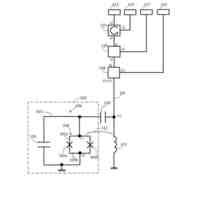
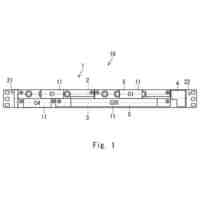
以下、制御装置の構成例を図1を用いて説明する。本実施形態に係る制御装置1は、ロボットアーム2を制御するものである。ロボットアーム2は、例えば、多関節型アームとして構成されている。多関節型アームは、先端部に部品などを保持するハンド部が設けられており、複数のリンクを複数の関節部を介して連結され構成されている。
【0010】
ハンド部は、部品Mを把持、吸着、磁着などを行うことで保持するように構成されている。ハンド部及び各関節部には、各関節部及びハンド部を駆動するサーボモータなどのアクチュエータが設けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本電気株式会社
分析装置
4日前
日本電気株式会社
学習装置
28日前
日本電気株式会社
超伝導量子回路
24日前
日本電気株式会社
マルチバンドバラン
22日前
日本電気株式会社
送信装置および通信装置
今日
日本電気株式会社
検知装置および検知方法
4日前
日本電気株式会社
量子回路装置と制御方法
4日前
日本電気株式会社
量子回路装置と制御方法
4日前
日本電気株式会社
通信装置および通信方法
今日
日本電気株式会社
端末装置および無線通信方法
15日前
日本電気株式会社
分析方法および分析システム
1日前
日本電気株式会社
機器冷却装置及びその冷却方法
16日前
日本電気株式会社
処理装置、方法、及びプログラム
28日前
日本電気株式会社
共振器及びそれを備えた導波回路
2日前
日本電気株式会社
プログラム、算出装置、及び方法
16日前
日本電気株式会社
ピーク抑圧装置及びピーク抑圧方法
14日前
日本電気株式会社
推定装置、推定方法及びプログラム
7日前
日本電気株式会社
システム及びマイグレーション方法
4日前
日本電気株式会社
推定装置、推定方法及びプログラム
7日前
日本電気株式会社
画像管理システムおよび画像管理方法
2日前
日本電気株式会社
処理装置、処理方法、及びプログラム
4日前
日本電気株式会社
推定装置、推定方法、及び、記録媒体
1日前
日本電気株式会社
波長可変レーザ装置及びその構成方法
今日
日本電気株式会社
注文端末、注文受付方法及びプログラム
今日
日本電気株式会社
予測システム、予測方法及びプログラム
7日前
日本電気株式会社
通信システム及びパケット順序補正方法
15日前
日本電気株式会社
管理システム、管理方法及びプログラム
14日前
日本電気株式会社
通信装置、通信方法及び通信プログラム
1日前
日本電気株式会社
判定装置、判定方法、及び、プログラム
24日前
日本電気株式会社
映像伝送装置、映像伝送方法、プログラム
4日前
日本電気株式会社
画像選択装置、画像選択方法及び記憶媒体
2日前
日本電気株式会社
管理装置、管理方法および管理プログラム
2日前
日本電気株式会社
情報処理システム、処理方法、プログラム
4日前
日本電気株式会社
映像処理装置、映像処理方法、プログラム
4日前
日本電気株式会社
画像検索装置、画像検索方法及び記憶媒体
25日前
日本電気株式会社
情報処理装置、情報処理方法、プログラム
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ