TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025148059
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024048637
出願日
2024-03-25
発明の名称
作業車両
出願人
日立建機株式会社
代理人
弁理士法人武和国際特許事務所
主分類
E02F
9/22 20060101AFI20250930BHJP(水工;基礎;土砂の移送)
要約
【課題】作業装置を障害物として誤検知することを回避しつつ、作業装置と接触する可能性のある障害物を精度よく検出することが可能な作業車両を提供する。
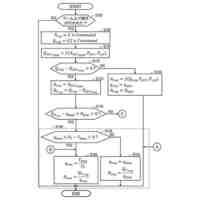
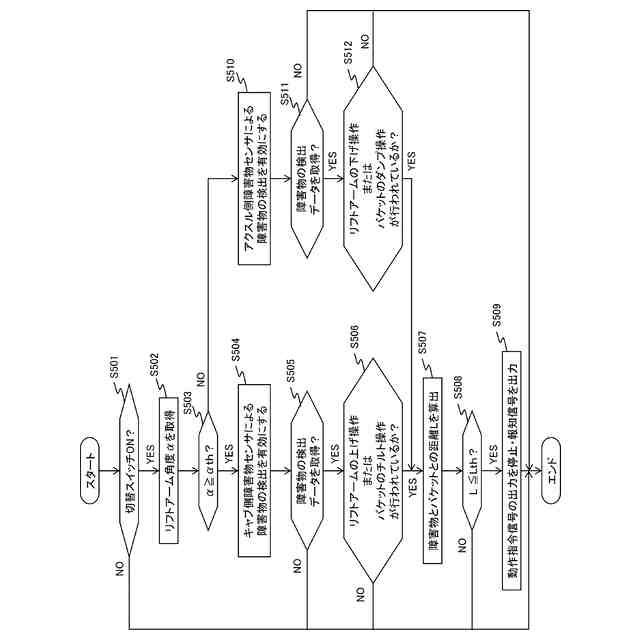
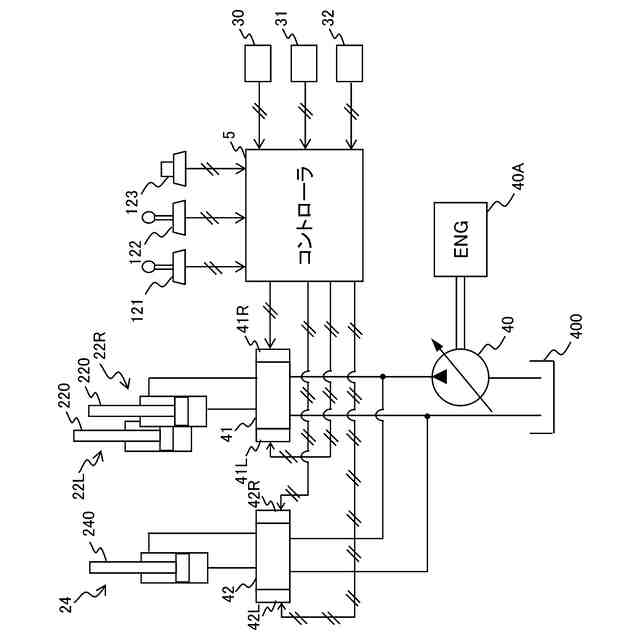
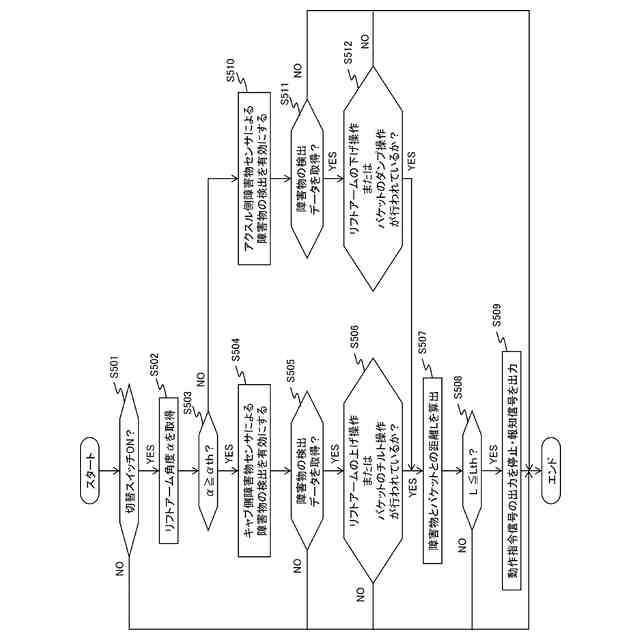
【解決手段】作業装置2を備えた作業車両において、前フレーム1Aにおける上部に設けられ、車体の前方上方に存する障害物を検出するキャブ側障害物センサ31と、前フレーム1Aにおける下部に設けられ、車体の前方下方に存する障害物を検出するアクスル側障害物センサ32と、を有し、作業装置2の動作を制御するコントローラ5は、作業装置2の姿勢が水平姿勢または上方姿勢となっている場合にキャブ側障害物センサ31による障害物の検出を有効にし、作業装置2の姿勢が下方姿勢となっている場合にアクスル側障害物センサ32による障害物の検出を有効にし、検出された障害物と作業装置2との距離Lが所定の距離閾値Lth以下である場合に、作業装置2の動作停止制御を実行する。
【選択図】図6
特許請求の範囲
【請求項1】
車体と、
前記車体の前部に取り付けられた作業装置と、
前記作業装置の姿勢を検出する姿勢検出装置と、
前記作業装置の動作を制御するコントローラと、
を備えた作業車両において、
前記車体の前記前部における上部に設けられ、前記車体の前方上方に存する障害物を検出する第1障害物検出装置と、
前記車体の前記前部における下部に設けられ、前記車体の前方下方に存する障害物を検出する第2障害物検出装置と、
を有し、
前記コントローラは、
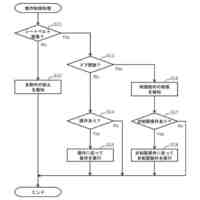
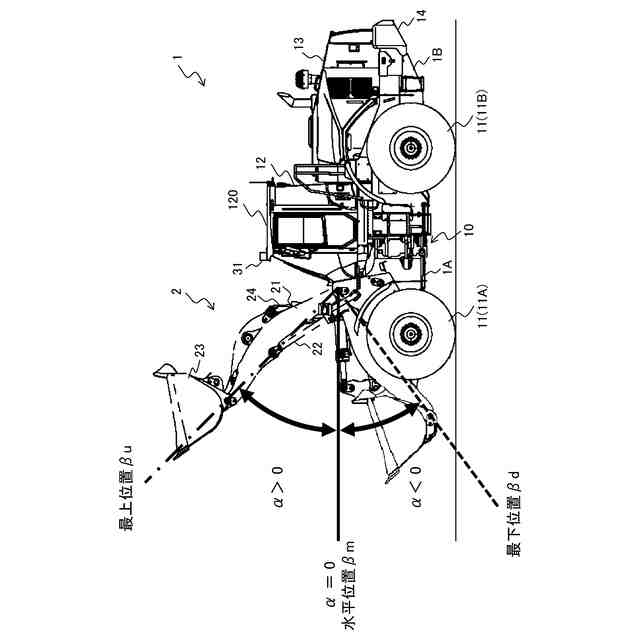
前記姿勢検出装置で検出された前記作業装置の姿勢が、前記車体の接地面に対して水平となる水平姿勢または前記水平姿勢よりも上方となる上方姿勢となっている場合に、前記第1障害物検出装置による障害物の検出を有効にし、
前記姿勢検出装置で検出された前記作業装置の姿勢が、前記水平姿勢よりも下方となる下方姿勢となっている場合に、前記第2障害物検出装置による障害物の検出を有効にし、
有効となっている前記第1障害物検出装置もしくは前記第2障害物検出装置のいずれかの検出データに含まれる障害物の位置と、前記姿勢検出装置で検出された前記作業装置の姿勢と、に基づいて、検出された障害物と前記作業装置との距離を算出し、
算出した前記距離が所定の距離閾値以下である場合に、前記作業装置の動作を停止させる動作停止制御を実行する
ことを特徴とする作業車両。
続きを表示(約 780 文字)
【請求項2】
請求項1に記載の作業車両において、
前記第1障害物検出装置は、
前記車体上に設けられたキャブの天井部における前端側に配置され、
前記第2障害物検出装置は、
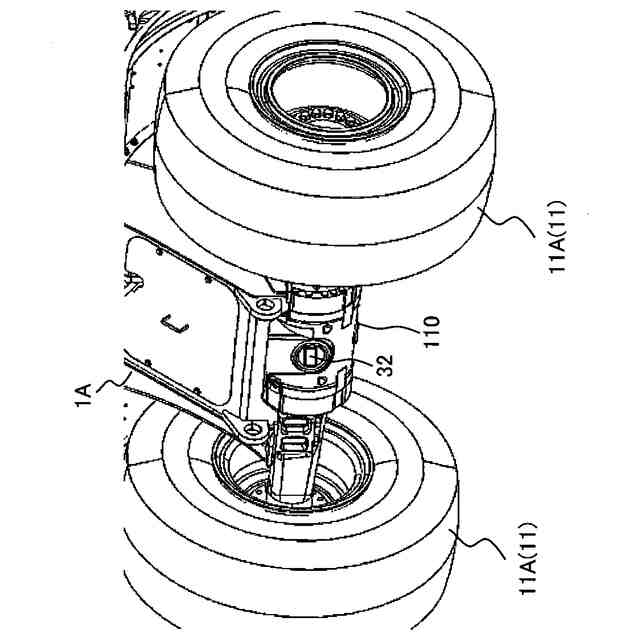
前記車体の前記前部に設けられた一対の前輪を接続するアクスルにおける軸方向の中央部の前側に配置されている
ことを特徴とする作業車両。
【請求項3】
請求項1に記載の作業車両において、
前記作業装置を操作するための操作装置をさらに備え、
前記コントローラは、
前記第1障害物検出装置による障害物の検出を有効にしたときには、前記操作装置から前記作業装置の上方動作に係る操作信号を取得し、かつ、算出した前記距離が前記所定の距離閾値以下である場合に、前記動作停止制御を実行し、
前記第2障害物検出装置による障害物の検出を有効にしたときには、前記操作装置から前記作業装置の下方動作に係る操作信号を取得し、かつ、算出した前記距離が前記所定の距離閾値以下である場合に、前記動作停止制御を実行する
ことを特徴とする作業車両。
【請求項4】
請求項1に記載の作業車両において、
前記コントローラによる前記動作停止制御を実行するか否かを切り替える切替装置をさらに備えた
ことを特徴とする作業車両。
【請求項5】
請求項1に記載の作業車両において、
障害物と前記作業装置との接近を報知する報知装置をさらに備え、
前記コントローラは、
算出した前記距離が前記距離閾値以下である場合に、障害物と前記作業装置との接近を報知するための報知信号を前記報知装置に対して出力すると共に、前記動作停止制御を実行する
ことを特徴とする作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業装置を備えた作業車両に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
一般に、油圧ショベルやホイールローダといった作業機械では、作業装置を回動させる範囲が広く、積込み対象と作業機械との間には作業装置が位置することから、作業装置の位置によっては、運転室内で運転操作を行っているオペレータの前方視界が遮られ視認し難い状況が生じる。視認し難い状況での作業によっては、機体あるいは作業装置が作業機械の周囲にある障害物に接触してしまう可能性がある。そこで、このような事態を回避すべく、作業機械には、障害物検出センサが搭載されており、障害物検出センサで障害物が検出された場合には、その障害物と作業機械との接触を回避するための制御が実行される。
【0003】
例えば、特許文献1に開示された障害物との接触を回避する技術では、検出された障害物が機体の周囲に対して予め設定された接触防止領域内に位置し、かつ作業装置が障害物に接近する方向に操作された場合、作業装置の作動を停止する制御が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2007-23486号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の接触を回避する技術では、作業装置の操作中に機体の周囲の比較的広範囲に対して常に障害物の検出を行っていることから、この装置をホイールローダに適用した場合には、車体の前部に取り付けられた作業装置が走行中に動作すると、その作業装置を障害物として誤検知し、作業装置が停止してしまうおそれがある。例えば、前方上方にシャッターが存在する際に、作業装置をシャッターに近い高さまで上げ操作したい場合や、前方下方に岩石や道路上の構築物が存在する際に、作業装置をそれらに近い高さまで下げ操作したい場合に、作業装置を動作させることができなくなってしまう。
【0006】
そこで、本発明の目的は、作業装置を障害物として誤検知することを回避しつつ、作業装置と接触する可能性のある障害物を精度よく検出することが可能な作業車両を提供することにある。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、本発明は、車体と、前記車体の前部に取り付けられた作業装置と、前記作業装置の姿勢を検出する姿勢検出装置と、前記作業装置の動作を制御するコントローラと、を備えた作業車両において、前記車体の前記前部における上部に設けられ、前記車体の前方上方に存する障害物を検出する第1障害物検出装置と、前記車体の前記前部における下部に設けられ、前記車体の前方下方に存する障害物を検出する第2障害物検出装置と、を有し、前記コントローラは、前記姿勢検出装置で検出された前記作業装置の姿勢が、前記車体の接地面に対して水平となる水平姿勢または前記水平姿勢よりも上方となる上方姿勢となっている場合に、前記第1障害物検出装置による障害物の検出を有効にし、前記姿勢検出装置で検出された前記作業装置の姿勢が、前記水平姿勢よりも下方となる下方姿勢となっている場合に、前記第2障害物検出装置による障害物の検出を有効にし、有効となっている前記第1障害物検出装置もしくは前記第2障害物検出装置のいずれかの検出データに含まれる障害物の位置と、前記姿勢検出装置で検出された前記作業装置の姿勢と、に基づいて、検出された障害物と前記作業装置との距離を算出し、算出した前記距離が所定の距離閾値以下である場合に、前記作業装置の動作を停止させる動作停止制御を実行することを特徴とする。
【発明の効果】
【0008】
本発明によれば、作業装置を障害物として誤検知することを回避しつつ、作業装置と接触する可能性のある障害物を精度よく検出することができる。上記した以外の課題、構成および効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
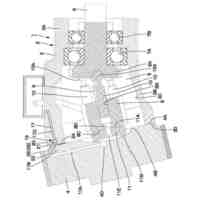
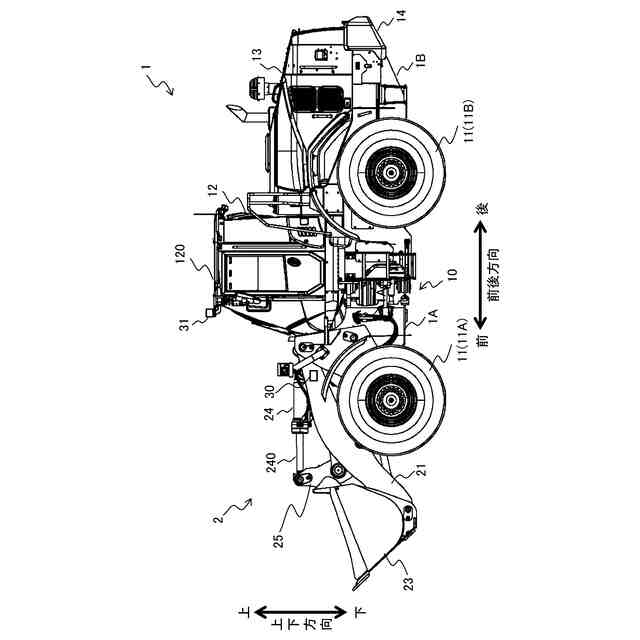
本発明の実施形態に係るホイールローダの一構成例を示す外観側面図である。
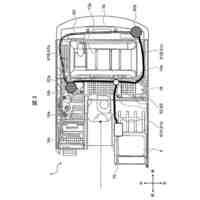
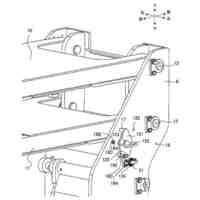
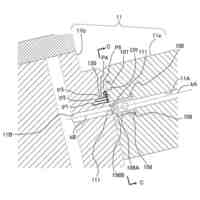
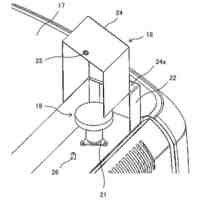
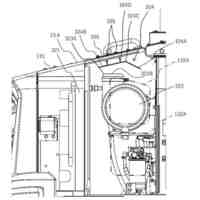
前方アクスルおよびその周辺部を拡大して示す斜視図である。
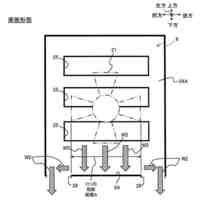
作業装置の動作姿勢について説明する図である。
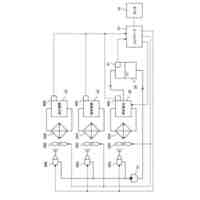
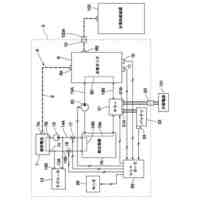
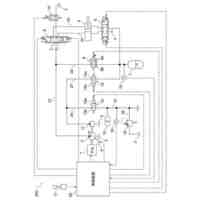
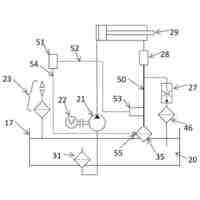
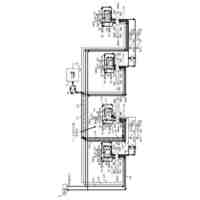
作業装置の駆動システムの一構成例を示すシステム構成図である。
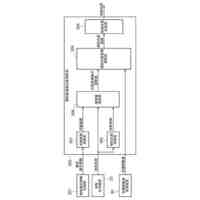
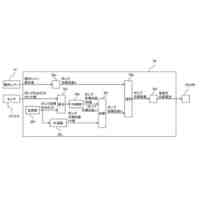
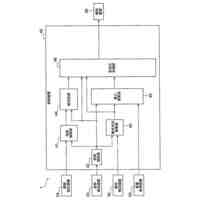
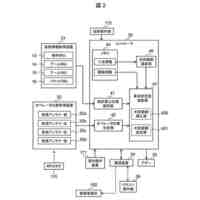
コントローラが有する機能を示す機能ブロック図である。
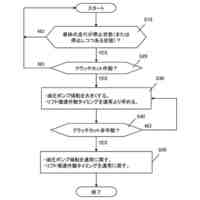
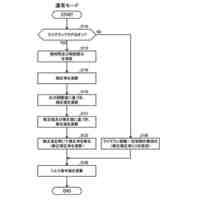
コントローラで実行される処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0010】
以下では、本発明の実施形態に係る作業車両の一態様として、荷役作業を行うホイールローダを例に挙げて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
3日前
日立建機株式会社
作業車両
16日前
日立建機株式会社
油圧機器
11日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業車両
12日前
日立建機株式会社
作業車両
12日前
日立建機株式会社
建設機械
12日前
日立建機株式会社
建設機械
12日前
日立建機株式会社
建設機械
16日前
日立建機株式会社
油圧機器
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
建設機械
16日前
日立建機株式会社
作業機械
10日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
建設機械
16日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
20日前
日立建機株式会社
建設機械
20日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
10日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業車両
10日前
日立建機株式会社
作業機械
10日前
日立建機株式会社
作業機械
9日前
日立建機株式会社
作業車両
9日前
日立建機株式会社
作業機械
9日前
日立建機株式会社
作業機械
9日前
日立建機株式会社
作業車両
5日前
日立建機株式会社
作業機械
9日前
日立建機株式会社
作業機械
9日前
日立建機株式会社
建設機械
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ