TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025125749
公報種別
公開特許公報(A)
公開日
2025-08-28
出願番号
2024021879
出願日
2024-02-16
発明の名称
車両用システム
出願人
愛知製鋼株式会社
代理人
個人
主分類
G05D
1/244 20240101AFI20250821BHJP(制御;調整)
要約
【課題】磁気マーカを利用して車両を自動走行させるシステムにおいて、磁気マーカが配置された経路から外れた位置から車両が移動した後、磁気マーカを検出するまでの間、車両を精度高く制御可能なシステムを提供すること。
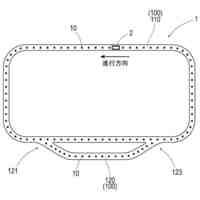
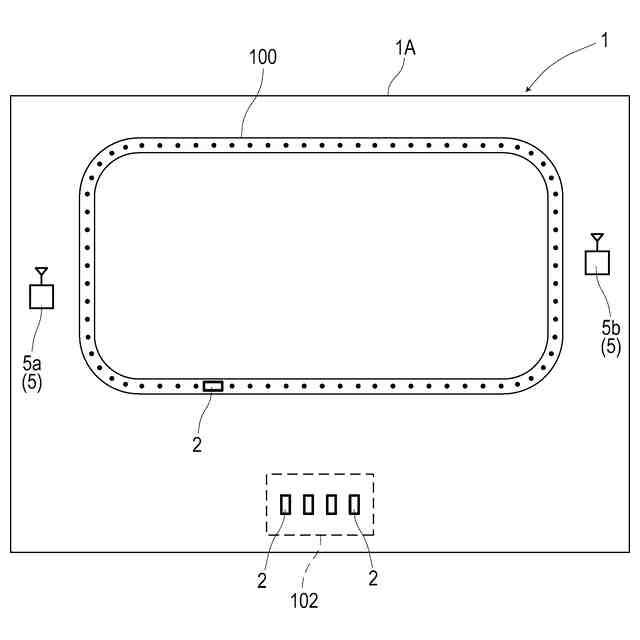
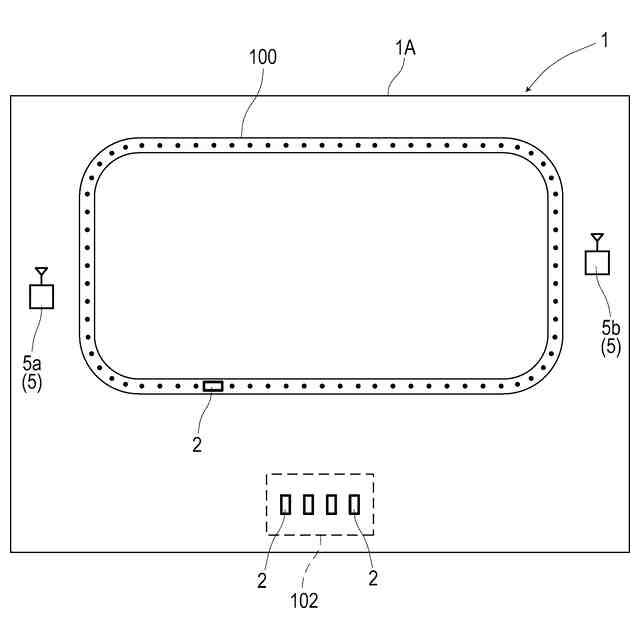
【解決手段】磁気マーカ10が間隔を空けて配置された経路100が設けられた移動空間1Aを車両2が走行するための車両用システム1では、移動空間1Aのうちの経路100から外れた位置から車両2が移動するとき、UWB測位により推定された車両位置を利用して車両2が制御される。
【選択図】図1
特許請求の範囲
【請求項1】
磁気マーカが間隔を空けて配置された経路が設けられた移動空間を車両が走行するための車両用システムであって、
前記磁気マーカを検出するために車両に設けられた磁気検出回路と、
車両の走行を制御する走行制御回路と、
移動空間の車両と無線通信するように設けられた複数の固定局と、
前記複数の固定局と無線通信するように車両に設けられた少なくとも一の車載通信回路と、
前記複数の固定局のうちのいずれか一の固定局と、前記少なくとも一の車載通信回路と、の間で実行される無線通信により、当該いずれか一の固定局と当該少なくとも一の車載通信回路との間の距離を計測する測距回路と、
前記少なくとも一の車載通信回路と、前記複数の固定局のうちの少なくともいずれか二以上の固定局と、の間の距離に基づき、前記移動空間における前記少なくとも一の車載通信回路の位置を推定し、当該少なくとも一の車載通信回路の位置に基づいて車両の位置を推定する測位回路と、を備え、
前記走行制御回路は、前記移動空間のうち、前記経路から外れた位置から車両が移動するとき、前記測位回路が推定した車両の位置を利用し、いずれかの磁気マーカの敷設位置まで移動するように車両を制御すると共に、
当該いずれかの磁気マーカが検出された後、前記経路に沿って配置された磁気マーカを検出しながら当該経路を移動するように車両を制御するように構成されている車両用システム。
続きを表示(約 730 文字)
【請求項2】
請求項1において、前記測位回路は、前記いずれか二以上の固定局としての2つの固定局と、前記少なくとも一の車載通信回路と、の間の距離を、前記移動空間に対応する一の2次元平面に射影することで、当該一の2次元平面における前記少なくとも一の車載通信回路の位置の候補となる複数の候補位置を特定すると共に、
前記移動空間において車両が所在する位置に関する情報を利用して前記複数の候補位置のうちのいずれかを選択することで前記少なくとも一の車載通信回路の位置を推定する車両用システム。
【請求項3】
請求項1において、前記少なくとも一の車載通信回路として、少なくとも、搭載位置が異なる2つの車載通信回路が車両に設けられ、
前記測位回路は、前記移動空間における当該2つの車載通信回路の位置を利用して車両の方位を推定する車両用システム。
【請求項4】
請求項1において、前記測位回路は、前記移動空間のうち、前記経路から外れた位置から車両が移動するとき、
前記少なくとも一の車載通信回路と、前記いずれか二以上の固定局と、の間の距離に基づいて推定される当該少なくとも一の車載通信回路の位置に基づき、車両の位置を推定する第1の処理を実行した後、
前記いずれかの磁気マーカの敷設位置に車両が到達するまでの間、状態空間モデルを利用して車両の位置を推定する第2の処理を実行するように構成されている車両用システム。
【請求項5】
請求項1~4のいずれか1項において、前記固定局及び前記車載通信回路は、超広帯域無線通信技術を利用して無線通信を実行するように構成されている車両用システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、磁気マーカを利用して車両を自動走行させるシステムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来より、工場や物流倉庫などにおいて、自動搬送車が広く活用されている。自動搬送車を自動走行させるためのシステムとして、経路に沿って間隔を空けて配置された磁気マーカを利用するシステムが提案されている(例えば特許文献1参照。)。このシステムでは、磁気マーカに対する車両の横偏差を制御量として操舵制御が実行され、これにより経路に沿って車両が移動する。
【先行技術文献】
【特許文献】
【0003】
特開2022-158109号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、前記従来のシステムでは、例えば待機場所など、経路から外れた位置で車両が始動する際、経路上の磁気マーカを最初に検出するまでの間の車両の制御性の確保が課題となっている。
【0005】
本発明は、前記従来の問題点に鑑みてなされたものであり、磁気マーカを利用して車両を自動走行させるシステムにおいて、磁気マーカが配置された経路から外れた位置から車両が移動した後、磁気マーカを検出するまでの間、車両を精度高く制御可能なシステムを提供しようとするものである。
【課題を解決するための手段】
【0006】
本発明は、磁気マーカが間隔を空けて配置された経路が設けられた移動空間を車両が走行するための車両用システムであって、
前記磁気マーカを検出するために車両に設けられた磁気検出回路と、
車両の走行を制御する走行制御回路と、
移動空間の車両と無線通信するように設けられた複数の固定局と、
前記複数の固定局と無線通信するように車両に設けられた少なくとも一の車載通信回路と、
前記複数の固定局のうちのいずれか一の固定局と、前記少なくとも一の車載通信回路と、の間で実行される無線通信により、当該いずれか一の固定局と当該少なくとも一の車載通信回路との間の距離を計測する測距回路と、
前記少なくとも一の車載通信回路と、前記複数の固定局のうちの少なくともいずれか二以上の固定局と、の間の距離に基づき、前記移動空間における前記少なくとも一の車載通信回路の位置を推定し、当該少なくとも一の車載通信回路の位置に基づいて車両の位置を推定する測位回路と、を備え、
前記走行制御回路は、前記移動空間のうち、前記経路から外れた位置から車両が移動するとき、前記測位回路が推定した車両の位置を利用し、いずれかの磁気マーカの敷設位置まで移動するように車両を制御すると共に、
当該いずれかの磁気マーカが検出された後、前記経路に沿って配置された磁気マーカを検出しながら当該経路を移動するように車両を制御するように構成されている車両用システムにある。
【発明の効果】
【0007】
本発明の車両用システムは、磁気マーカを検出しながら経路に沿って車両が移動するシステムである。この車両用システムにおける車両は、磁気マーカを検出するための磁気検出回路のほかに、固定局と無線通信するための車載通信回路を備えている。そして、本発明の車両用システムでは、固定局と車載通信回路との間の無線通信により距離を計測することで、移動空間における車両の位置が推定される。
【0008】
車両の走行を制御する走行制御回路は、経路から外れた位置から車両が移動するとき、無線通信により計測された距離を利用して推定された車両の位置を利用し、いずれかの磁気マーカの敷設位置まで車両を誘導する。いずれかの磁気マーカが検出された後では、走行制御回路は、経路に沿って配置された磁気マーカを検出しながら移動するように車両を制御する。
【0009】
本発明の車両用システムによれば、磁気マーカが配置された経路から外れた位置から車両が移動する場合であっても、いずれかの磁気マーカが検出されるまでの間、車両を精度高く制御可能である。いずれかの磁気マーカが検出された後では、磁気マーカを利用して精度高く車両を制御可能である。
【図面の簡単な説明】
【0010】
実施例1における、車両用システムの説明図。
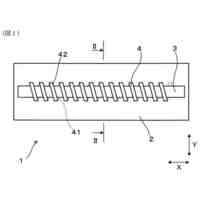
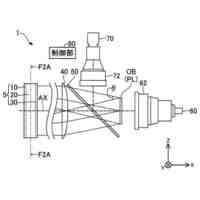
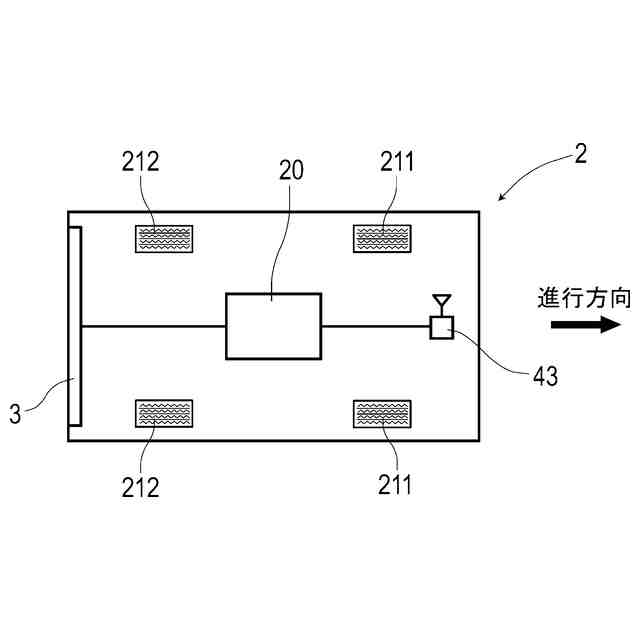
実施例1における、車両の構成図。
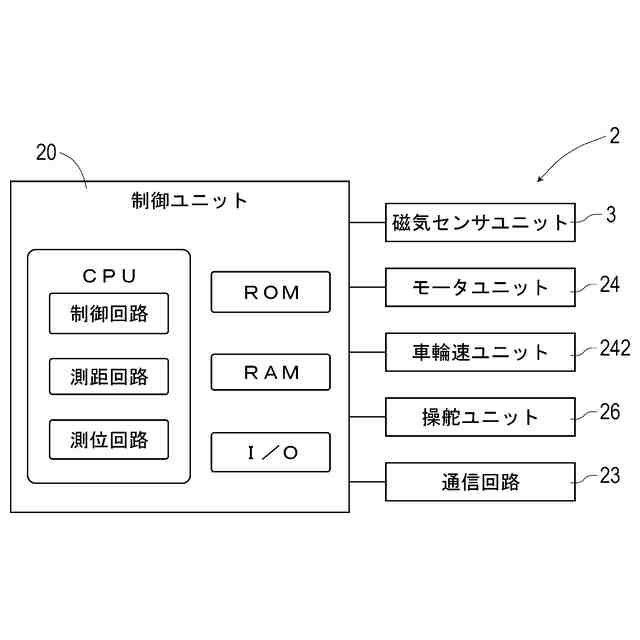
実施例1における、車両の電気的な構成を示すブロック図。
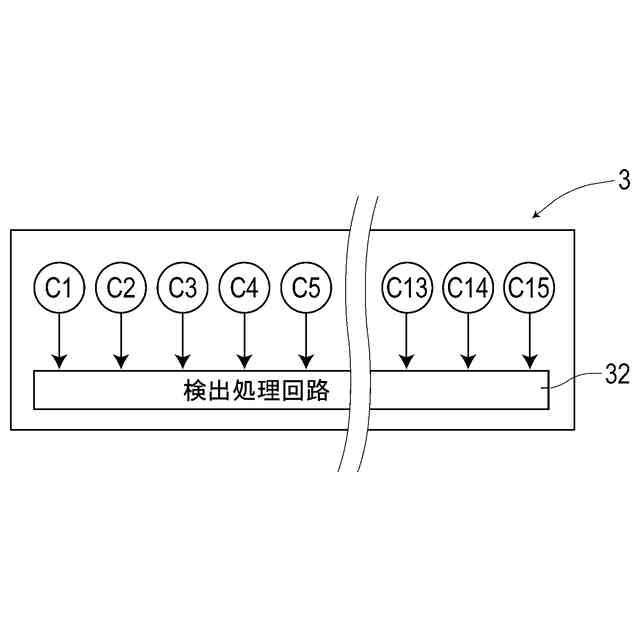
実施例1における、磁気センサモジュールを示すブロック図。
実施例1における、固定局と通信回路との間の距離を2次元平面に射影する様子の説明図。
実施例1における、UWB測位の説明図その1。
実施例1における、UWB測位の説明図その2。
実施例2における、UWB測位の説明図。
実施例3における、座標定義の説明図。
実施例4における、UWB測位の説明図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
愛知製鋼株式会社
受け架台
9日前
愛知製鋼株式会社
車両用システム
3日前
愛知製鋼株式会社
磁気センサ装置
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
愛知製鋼株式会社
希土類磁石粉末の製造方法
1か月前
愛知製鋼株式会社
磁気センサ素子の製造方法
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
4日前
愛知製鋼株式会社
マーカシステム及び制御方法
4日前
株式会社豊田中央研究所
外観検査装置
26日前
株式会社豊田中央研究所
外観検査装置
1か月前
愛知製鋼株式会社
挿入用耐火物挿入装置、及び挿入用耐火物挿入方法
26日前
トヨタ自動車株式会社
負極活物質及びその製造方法
2日前
愛知製鋼株式会社
水素吸蔵合金、アルカリ蓄電池用負極及びアルカリ蓄電池
25日前
トヨタ自動車株式会社
ニッケル水素電池用負極活物質及びその製造方法
4日前
愛知製鋼株式会社
高圧水素部品用マルテンサイト系ステンレス鋼、これを用いた高圧水素部品及びその製造方法
4か月前
個人
生産早送り装置
19日前
株式会社豊田自動織機
産業車両
9日前
株式会社FUJI
工作機械
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社FUJI
加工機械ライン
1か月前
愛知製鋼株式会社
車両用システム
3日前
個人
作業車両自動化システム
25日前
ローム株式会社
半導体集積回路
2か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
生産管理システム
1か月前
三栄ハイテックス株式会社
基準電圧回路
2か月前
トヨタ自動車株式会社
移動制御システム
19日前
トヨタ自動車株式会社
ペダル機構
3か月前
株式会社ダイフク
搬送設備
23日前
三菱電機株式会社
自己位置推定装置
3か月前
株式会社鷺宮製作所
制御装置
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
トヨタ自動車株式会社
減圧弁
27日前
株式会社オプトン
制御プログラム生成装置
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ