TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025163563
公報種別
公開特許公報(A)
公開日
2025-10-29
出願番号
2024066960
出願日
2024-04-17
発明の名称
車両制御方法および車両制御装置
出願人
日産自動車株式会社
,
Astemo株式会社
代理人
個人
,
個人
,
個人
主分類
B60W
30/12 20200101AFI20251022BHJP(車両一般)
要約
【課題】目標走行軌道に沿って自車両が走行するためのヨーレートを制駆動力差で生成する制御において、目標走行軌道への追従性を向上する。
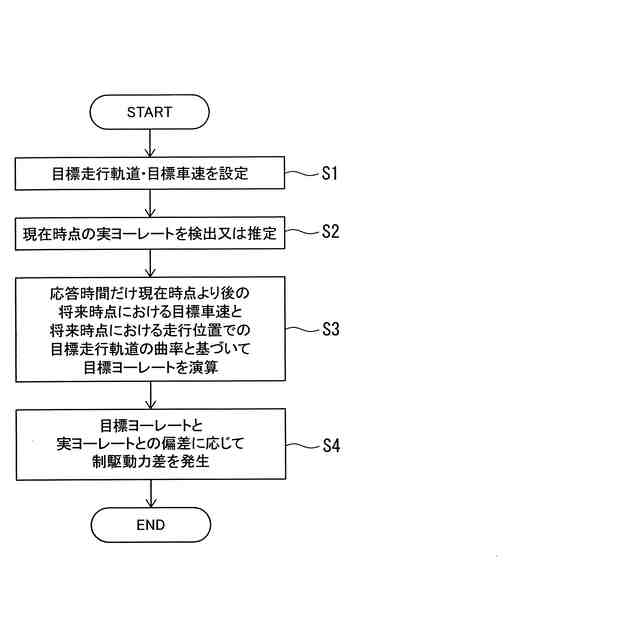
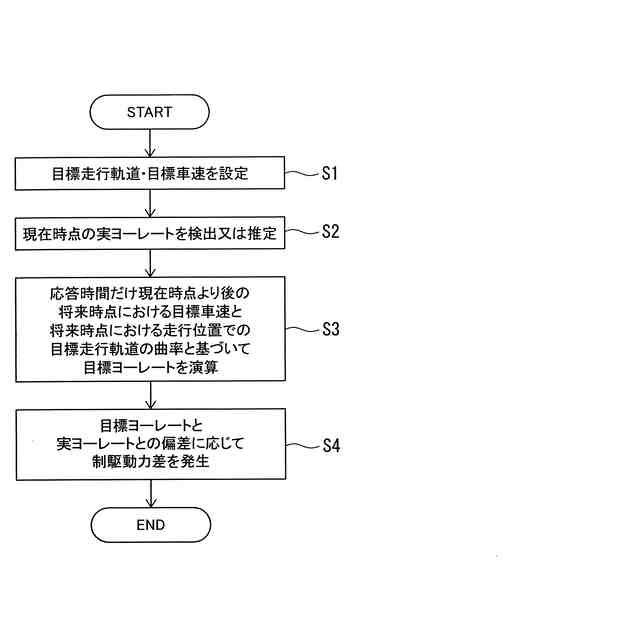
【解決手段】車両制御方法では、自車両の目標走行軌道と目標車速とを設定し(S1)、現在時点において自車両に発生した実ヨーレートを検出または推定し(S2)、各車輪に制駆動力差を発生させてから自車両にヨーモーメントが付加されるまでの応答時間だけ現在時点より後の将来時点における目標車速と、将来時点における走行位置での目標走行軌道の曲率と基づいて、目標ヨーレートを演算し(S3)、目標ヨーレートと実ヨーレートとの偏差に応じて、各車輪に制駆動力差を発生させる(S4)。
【選択図】図5
特許請求の範囲
【請求項1】
自車両の目標走行軌道と目標車速とを設定し、
現在時点において前記自車両に発生した実ヨーレートを検出または推定し、
各車輪に制駆動力差を発生させてから前記自車両にヨーモーメントが付加されるまでの応答時間だけ現在時点より後の将来時点における前記目標車速と、前記将来時点における走行位置での前記目標走行軌道の曲率と基づいて、目標ヨーレートを演算し、
前記目標ヨーレートと前記実ヨーレートとの偏差に応じて、各車輪に制駆動力差を発生させる、
ことを特徴とする車両制御方法。
続きを表示(約 1,100 文字)
【請求項2】
前記自車両の車両諸元又は状態量に基づいて前記応答時間を設定することを特徴とする請求項1に記載の車両制御方法。
【請求項3】
前記自車両が走行する道路の路面摩擦係数に基づいて前記応答時間を設定することを特徴とする請求項1に記載の車両制御方法。
【請求項4】
自律運転制御の実行中には、前記自律運転制御に基づいて前記目標走行軌道を設定し、
手動運転により前記自車両が走行している場合には、走路境界を認識して、認識された走路境界に基づいて前記目標走行軌道を設定する、
ことを特徴とする請求項1に記載の車両制御方法。
【請求項5】
自律運転制御の実行中には、前記自律運転制御に基づいて前記目標車速を設定し、
手動運転により前記自車両がしている場合には、アクセルペダル及びブレーキペダルの操作量に基づいて前記目標車速を設定するか、現在の車速を前記目標車速として設定するか、自動速度制御によって前記目標車速を設定する、
ことを特徴とする請求項1に記載の車両制御方法。
【請求項6】
前記現在時点におけるヨーレートの目標値であるヨーレート目標値を演算し、
前記現在時点における目標車速と、前記現在時点における走行位置での前記目標走行軌道の曲率とに基づいて、前記目標走行軌道上を走行するのに要する第1必要ヨーレートを演算し、
前記将来時点における目標車速と、前記将来時点における走行位置での前記目標走行軌道の曲率とに基づいて、前記目標走行軌道上を走行するのに要する第2必要ヨーレートを演算し、
前記第1必要ヨーレートと前記第2必要ヨーレートとの間のヨーレート差分で前記ヨーレート目標値を補正することにより前記目標ヨーレートを演算する、ことを特徴とする請求項1に記載の車両制御方法。
【請求項7】
自車両に発生した実ヨーレートを検出するセンサまたは実ヨーレートを推定する処理と、
自車両の目標走行軌道と目標車速とを設定する処理、各車輪に制駆動力差を発生させてから前記自車両にヨーモーメントが付加されるまでの応答時間だけ現在時点より後の将来時点における前記目標車速と、前記将来時点における走行位置での前記目標走行軌道の曲率と基づいて、目標ヨーレートを演算する処理、および前記目標ヨーレートと現在時点において前記自車両に発生した前記実ヨーレートとの偏差に応じて、各車輪に発生させる制駆動力差を制御する処理を行うコントローラと、
を備えることを特徴とする車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御方法および車両制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1に記載の車両の走行制御装置は、現在時点で車両挙動を追従させたい目標ヨーレートを算出し、目標ヨーレートと実ヨーレートとの差分に基づいて、実ヨーレートと目標ヨーレートとの差分が小さくなるように左右の車輪に制動力差を付加する。
【先行技術文献】
【特許文献】
【0003】
特開2017-165216号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の走行制御装置は、現在時点で追従させたい目標ヨーレートを演算して左右の車輪の制動力差を制御する。このため、目標走行軌道に沿って自車両を走行させる場合に、将来の走行位置における目標走行軌道の形状変化が制御に反映されず、目標走行軌道への追従性が悪い。
本発明は、目標走行軌道に沿って自車両が走行するためのヨーレートを制駆動力差で生成する制御において、目標走行軌道への追従性を向上することを目的とする。
【課題を解決するための手段】
【0005】
本発明の一態様による車両制御方法では、自車両の目標走行軌道と目標車速とを設定し、現在時点において自車両に発生した実ヨーレートを検出または推定し、各車輪に制駆動力差を発生させてから自車両にヨーモーメントが付加されるまでの応答時間だけ現在時点より後の将来時点における目標車速と、将来時点における走行位置での目標走行軌道の曲率と基づいて、目標ヨーレートを演算し、目標ヨーレートと実ヨーレートとの偏差に応じて、各車輪に制駆動力差を発生させる。
【発明の効果】
【0006】
本発明によれば、目標走行軌道に沿って自車両が走行するためのヨーレートを制駆動力差で生成する制御において、目標走行軌道への追従性を向上できる。
【図面の簡単な説明】
【0007】
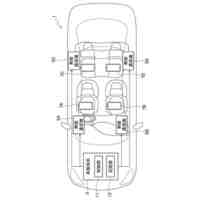
実施形態の車両制御装置の概略構成例を示す図である。
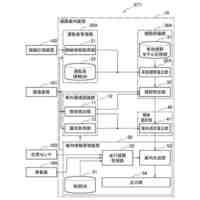
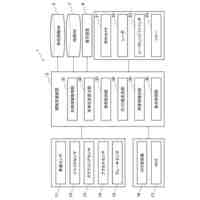
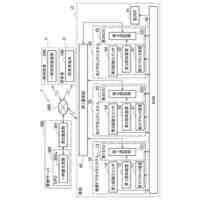
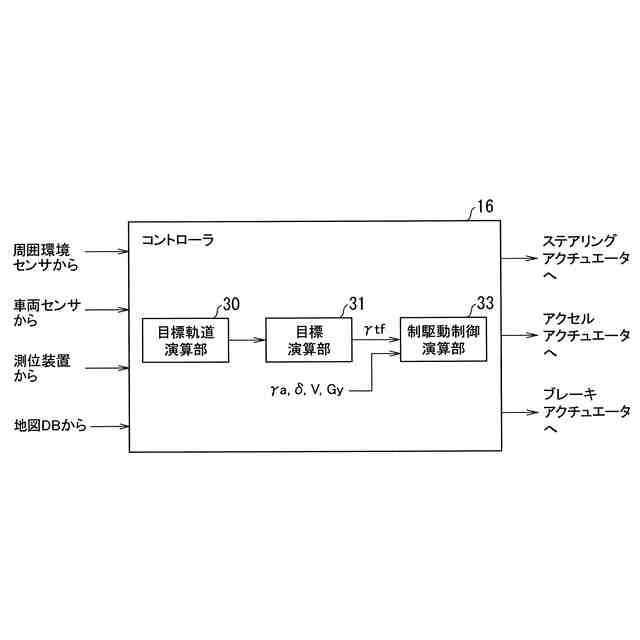
第1実施形態のコントローラの機能構成の一例のブロック図である。
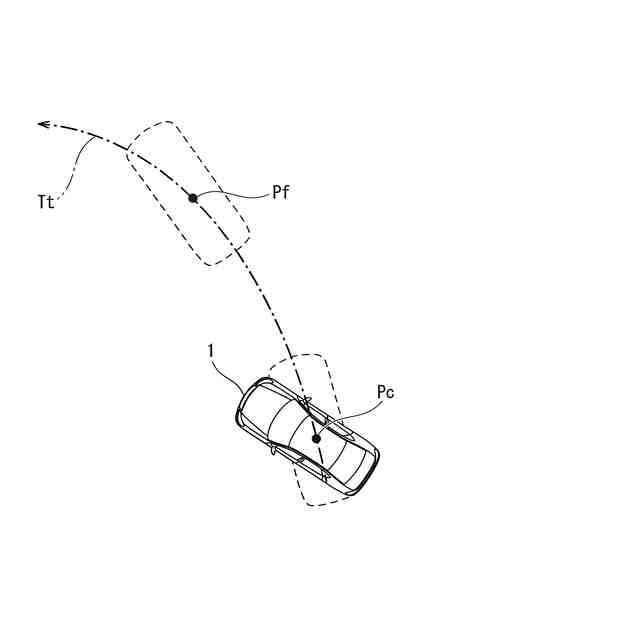
現在時点と、応答時間だけ現在時点より後の将来時点における走行位置の模式図である。
制駆動制御演算部の機能構成の一例のブロック図である。
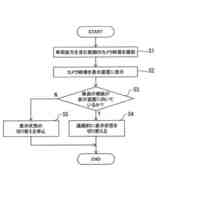
第1実施形態の車両制御方法の一例のフローチャートである。
第2実施形態のコントローラの機能構成の一例のブロック図である。
【発明を実施するための形態】
【0008】
以下、本発明の実施形態について、図面を参照しつつ説明する。なお、各図面は模式的なものであって、現実のものとは異なる場合がある。また、以下に示す本発明の実施形態は、本発明の技術的思想を具体化するための装置や方法を例示するものであって、本発明の技術的思想は、構成部品の構造、配置等を下記のものに特定するものではない。本発明の技術的思想は、特許請求の範囲に記載された請求項が規定する技術的範囲内において、種々の変更を加えることができる。
【0009】
(第1実施形態)
(構成)
図1は、実施形態の車両制御装置の概略構成例を示す図である。自車両1は、自車両1の少なくとも駆動力又は制動力を制御する車両制御装置10を備える。例えば車両制御装置10は、自車両1の周辺の走行環境に基づいて自車両1の操舵角、駆動力及び制動力を制御して、運転者が関与せずに自車両1を自動で運転する自律運転制御を実行してよい。また例えば車両制御装置10は、自車両1の操舵角、駆動力又は制動力の少なくとも1つを制御することにより運転者による自車両1の運転を支援する運転支援制御を実行してよい。運転支援制御は、例えば自動ブレーキ、車線維持制御、自動速度制御(例えば定速走行制御や、先行車両との車間距離を目標車間距離に保つ車間制御若しくは先行車追従制御)等を含んでもよい。
【0010】
車両制御装置10は、周囲環境センサ11と、車両センサ12と、測位装置13と、地図データベース(地図DB)14と、ナビゲーションシステム15と、コントローラ16と、ステアリングアクチュエータ17と、アクセルアクチュエータ18と、ブレーキアクチュエータ19と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日産自動車株式会社
電動車両
今日
日産自動車株式会社
保持機構
18日前
日産自動車株式会社
二次電池
8日前
日産自動車株式会社
保持機構
12日前
日産自動車株式会社
二次電池
11日前
日産自動車株式会社
積層型電池
18日前
日産自動車株式会社
面圧付与機構
14日前
日産自動車株式会社
面圧付与機構
18日前
日産自動車株式会社
電池モジュール
5日前
日産自動車株式会社
リチウム二次電池
11日前
日産自動車株式会社
エンジンのアンダカバー
5日前
日産自動車株式会社
ギヤ装置のブリーザ構造
14日前
株式会社ニフコ
締結構造
5日前
日産自動車株式会社
相乗り可否判定方法及び装置
8日前
日産自動車株式会社
車両用荷室における排熱構造
8日前
日産自動車株式会社
配車管理装置及び配車管理方法
19日前
日産自動車株式会社
車両制御装置及び車両制御方法
19日前
日産自動車株式会社
画像処理方法及び画像処理装置
25日前
日産自動車株式会社
経路案内方法及び経路案内装置
13日前
日産自動車株式会社
画像表示方法及び画像表示装置
25日前
日産自動車株式会社
車載機能制御方法及び車載端末
13日前
日産自動車株式会社
施錠制御方法及び施錠制御装置
7日前
日産自動車株式会社
運転支援方法及び運転支援装置
6日前
日産自動車株式会社
運転支援方法及び運転支援装置
5日前
住友理工株式会社
筒型防振装置
27日前
日産自動車株式会社
固体酸化物形燃料電池の製造方法
20日前
日産自動車株式会社
車両制御方法および車両制御装置
6日前
日産自動車株式会社
車両制御方法および車両制御装置
6日前
日産自動車株式会社
車両制御方法および車両制御装置
6日前
日産自動車株式会社
車両管理方法及び車両管理システム
13日前
日産自動車株式会社
内燃機関の油温制御方法および装置
14日前
日産自動車株式会社
車両監視方法、及び車両監視システム
28日前
日産自動車株式会社
充放電制御方法及び充放電制御システム
26日前
日産自動車株式会社
電池劣化診断方法及び電池劣化診断装置
19日前
日産自動車株式会社
電池品質診断方法及び電池品質診断装置
19日前
日産自動車株式会社
電池の仕分け方法及び電池の仕分け装置
19日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ