TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025034720
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023141283
出願日
2023-08-31
発明の名称
ベルトコンベヤの監視方法、システム及びプログラム
出願人
栗田工業株式会社
,
株式会社日立製作所
代理人
弁理士法人IPX
主分類
B65G
43/02 20060101AFI20250306BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】より容易にベルトの蛇行又は片寄りを発見可能なベルトコンベヤの監視方法等を提供する。
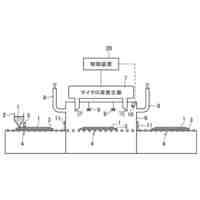
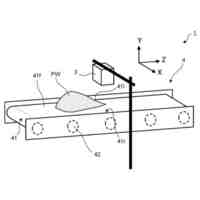
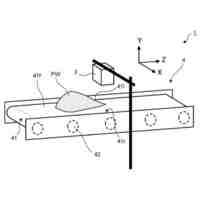
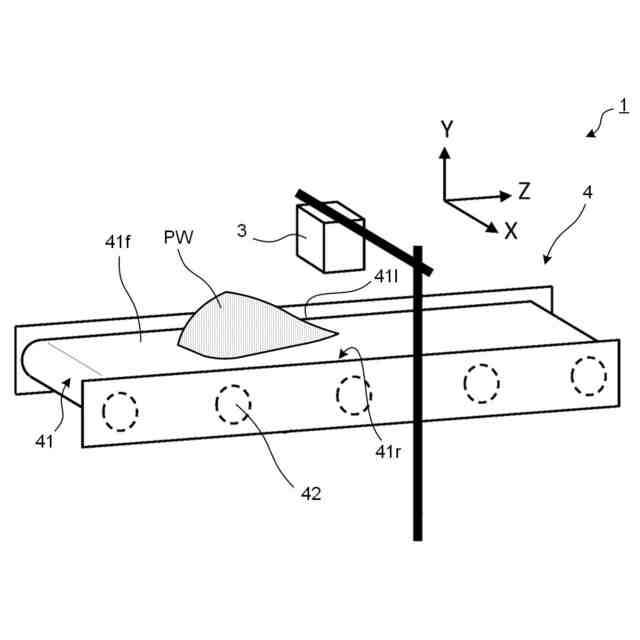
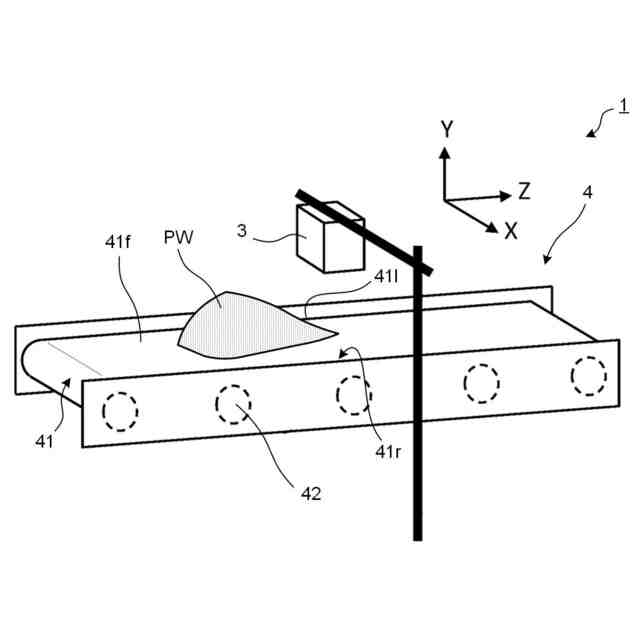
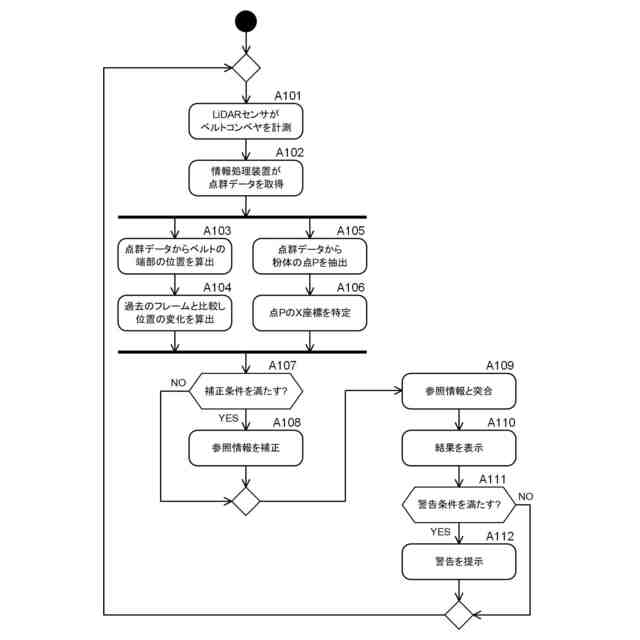
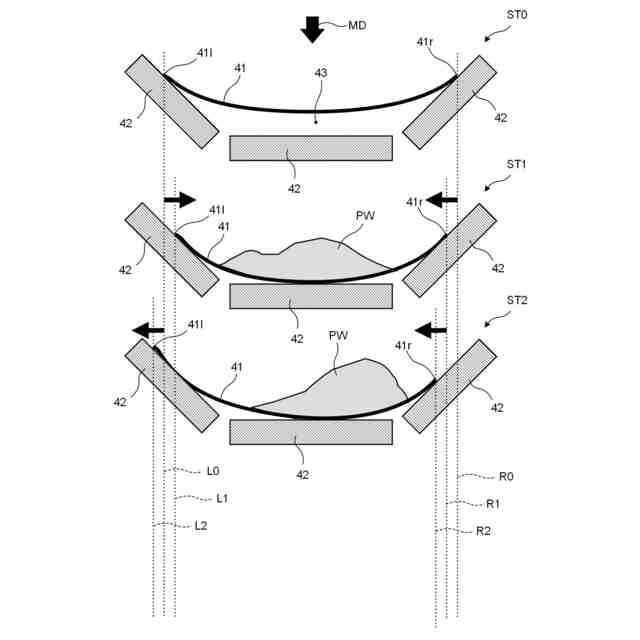
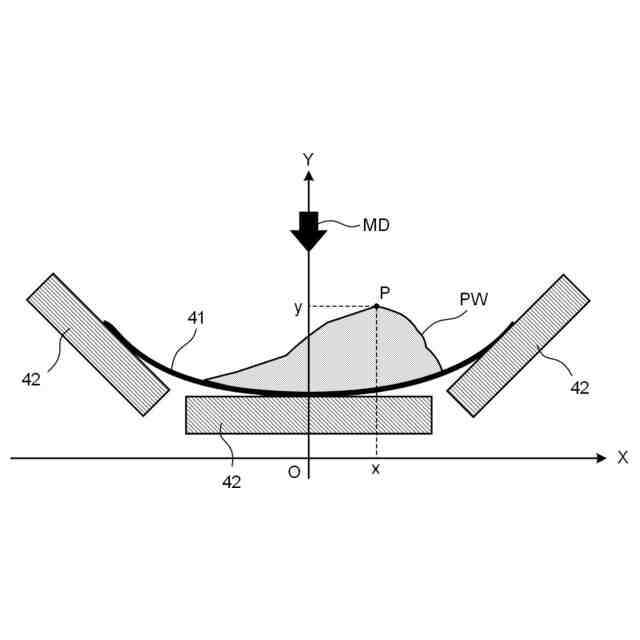
【解決手段】本発明の一態様によれば、ベルトコンベヤの監視方法が提供される。この監視方法は、次の各ステップを備える。取得ステップでは、ベルトコンベヤとは離間して設置された光学センサを介して、ベルトコンベヤのベルトに関する計測データを取得する。特定ステップでは、計測データより算出される、ベルトの幅を規定する端部の力学的パラメータに応じて、ベルトの蛇行又は片寄りの度合いを特定する。
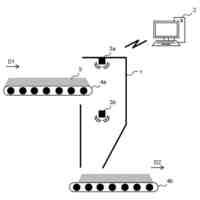
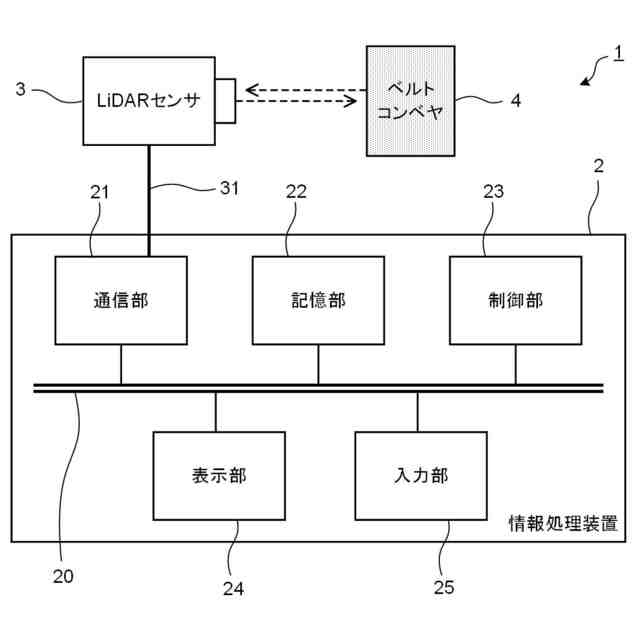
【選択図】図2
特許請求の範囲
【請求項1】
ベルトコンベヤの監視方法であって、
次の各ステップを備え、
取得ステップでは、前記ベルトコンベヤとは離間して設置された光学センサを介して、前記ベルトコンベヤのベルトに関する計測データを取得し、
特定ステップでは、前記計測データより算出される、前記ベルトの幅を規定する端部の力学的パラメータに応じて、前記ベルトの蛇行又は片寄りの度合いを特定する、方法。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の監視方法において、
前記力学的パラメータは、前記計測データ内での前記端部の位置である、方法。
【請求項3】
請求項2に記載の監視方法において、
前記特定ステップでは、前記端部の位置と予め設定された基準位置とを比較することによって、前記度合いを特定し、ここで前記基準位置は、前記ベルトに前記蛇行も前記片寄りも生じていない状態で、前記ベルトの計測することで得られた前記端部の位置である、方法。
【請求項4】
請求項3に記載の監視方法において、
さらに補正ステップでは、前記ベルトに積載される荷の量及び/又は前記ベルトコンベヤの発停に基づいて、前記基準位置を補正し、
前記特定ステップでは、前記端部の位置と前記補正ステップで補正された前記基準位置とを比較することによって、前記度合いを特定する、方法。
【請求項5】
請求項3に記載の監視方法において、
前記基準位置は、前記荷が積載されて前記ベルトが重力方向に沈み込んだ状態で得られた前記端部の位置である、方法。
【請求項6】
請求項1に記載の監視方法において、
前記特定ステップでは、前記端部の位置を学習済みモデルに入力することによって、前記度合いを特定し、ここで前記学習済みモデルは、前記端部の位置と前記ベルトの蛇行又は片寄りとの関係を予め機械学習させたモデルである、方法。
【請求項7】
請求項1に記載の監視方法において、
前記特定ステップでは、前記力学的パラメータに基づいて、前記幅が縮まる方向又は広がる方向に前記端部が移動したことをさらに特定する、方法。
【請求項8】
請求項1に記載の監視方法において、
前記光学センサは、LiDARセンサであり、
前記計測データは、前記LiDARセンサを介して得られた点群データである、方法。
【請求項9】
請求項8に記載の監視方法において、
前記LiDARセンサは、荷が積載される前記ベルトの積載面を俯瞰するように、前記ベルトの上方に設置される、方法。
【請求項10】
請求項1に記載の監視方法において、
さらに警告ステップでは、前記特定ステップで特定された前記度合いがしきい値を超える場合に、ユーザに警告を提示する、方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ベルトコンベヤの監視方法、システム及びプログラムに関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
特許文献1には、ベルトコンベヤの蛇行を検出する装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2000-118663号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1等の公知技術では、ベルトコンベヤそのものにセンサを取り付ける必要があり、取り付け自体の人的又は金銭的負担があることや、配置スペース等の問題で所望の箇所に配置することができないこともある。ベルトコンベヤにセンサを設置することができなかった場合、ベルトの蛇行等を把握することができず、人による現場での目視を要し、さらに負担となっている。
【0005】
本発明では上記事情を鑑み、より容易にベルトの蛇行又は片寄りを発見可能なベルトコンベヤの監視方法等を提供することとした。
【課題を解決するための手段】
【0006】
本発明の一態様によれば、ベルトコンベヤの監視方法が提供される。この監視方法は、次の各ステップを備える。取得ステップでは、ベルトコンベヤとは離間して設置された光学センサを介して、ベルトコンベヤのベルトに関する計測データを取得する。特定ステップでは、計測データより算出される、ベルトの幅を規定する端部の力学的パラメータに応じて、ベルトの蛇行又は片寄りの度合いを特定する。
【0007】
さらに、次に記載の各態様で提供されてもよい。
【0008】
(1)ベルトコンベヤの監視方法であって、次の各ステップを備え、取得ステップでは、前記ベルトコンベヤとは離間して設置された光学センサを介して、前記ベルトコンベヤのベルトに関する計測データを取得し、特定ステップでは、前記計測データより算出される、前記ベルトの幅を規定する端部の力学的パラメータに応じて、前記ベルトの蛇行又は片寄りの度合いを特定する、方法。
【0009】
このような態様によれば、より容易にベルトの蛇行又は片寄りを発見することができる。
【0010】
(2)上記(1)に記載の監視方法において、前記力学的パラメータは、前記計測データ内での前記端部の位置である、方法。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
栗田工業株式会社
水処理システム
6日前
栗田工業株式会社
水質浄化システム
20日前
栗田工業株式会社
廃水処理システム
2日前
栗田工業株式会社
空気冷却装置の運転方法
29日前
栗田工業株式会社
水処理装置及び水処理方法
2か月前
栗田工業株式会社
TMAH含有排水の処理方法
2か月前
栗田工業株式会社
排水処理設備および排水処理方法
1か月前
栗田工業株式会社
水質測定用希釈装置及び希釈方法
2日前
栗田工業株式会社
硫酸製造設備の熱交換器の洗浄方法
6日前
栗田工業株式会社
二酸化炭素の回収方法及び回収装置
2か月前
栗田工業株式会社
活性炭の再生方法及び再生システム
6日前
栗田工業株式会社
熱交換器および伝熱管外表面の洗浄方法
2日前
栗田工業株式会社
流動床式生物処理装置及びその運転方法
10日前
栗田工業株式会社
空冷式凝縮器の補助冷却装置の水処理方法
9日前
栗田工業株式会社
有価金属回収システムおよび有価金属の回収方法
2か月前
栗田工業株式会社
情報処理システム、情報処理方法及びプログラム
6日前
栗田工業株式会社
ベルトコンベヤの監視方法、システム及びプログラム
2か月前
栗田工業株式会社
シュート部材の監視方法、監視システム及びプログラム
2か月前
ヤマハロボティクスホールディングス株式会社
洗浄方法
22日前
栗田工業株式会社
ベルトコンベヤのトラブル予測方法、システム及びプログラム
2か月前
栗田工業株式会社
活性炭の再生方法
6日前
栗田工業株式会社
食品製造ロスのアップサイクルシステムの導入支援方法及びプログラム
1か月前
栗田工業株式会社
pH・酸化還元電位調整水の製造装置、pH・酸化還元電位調整水の製造方法および半導体装置の製造方法
3日前
個人
箱
7か月前
個人
ゴミ箱
7か月前
個人
包装体
7か月前
個人
ゴミ収集器
1か月前
個人
段ボール箱
1か月前
個人
容器
4か月前
個人
段ボール箱
1か月前
個人
土嚢運搬器具
3か月前
個人
宅配システム
1か月前
個人
角筒状構造体
9日前
個人
パウチ補助具
7か月前
個人
折り畳み水槽
7か月前
個人
コード類収納具
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ