TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025079735
公報種別
公開特許公報(A)
公開日
2025-05-22
出願番号
2023192602
出願日
2023-11-10
発明の名称
学習処理装置、状態監視装置、学習処理方法、状態監視方法、およびプログラム
出願人
日本精工株式会社
代理人
弁理士法人栄光事務所
主分類
G01M
13/04 20190101AFI20250515BHJP(測定;試験)
要約
【課題】回転速度情報を用いずに転がり軸受の状態監視を可能とする。
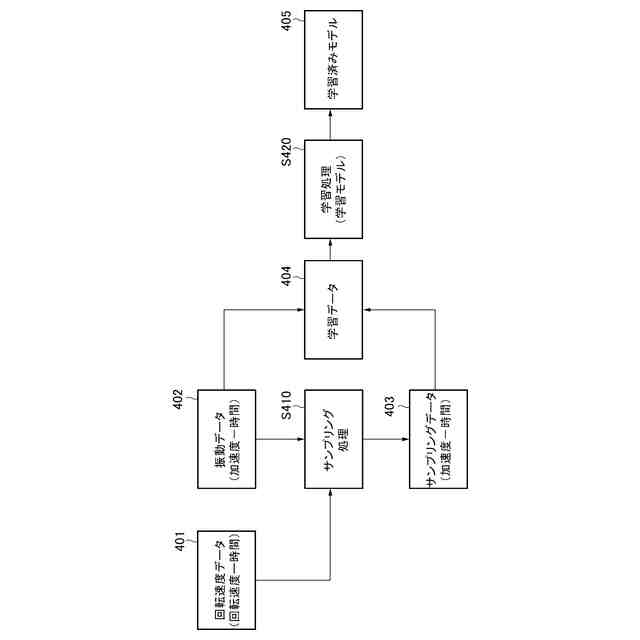
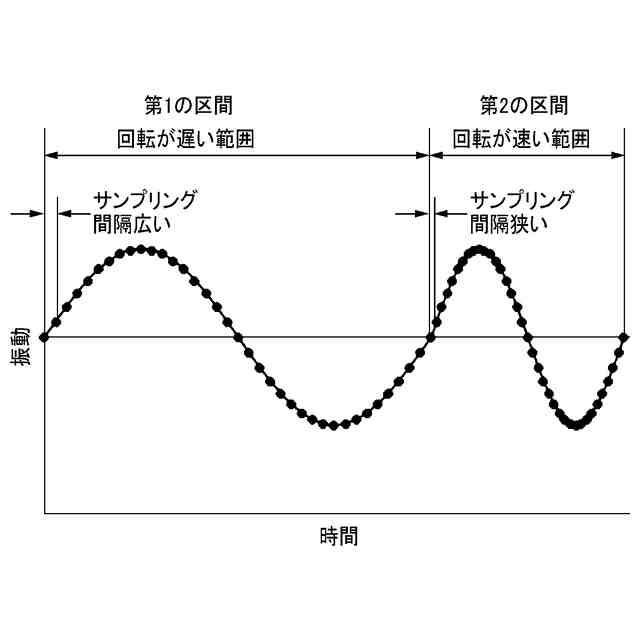
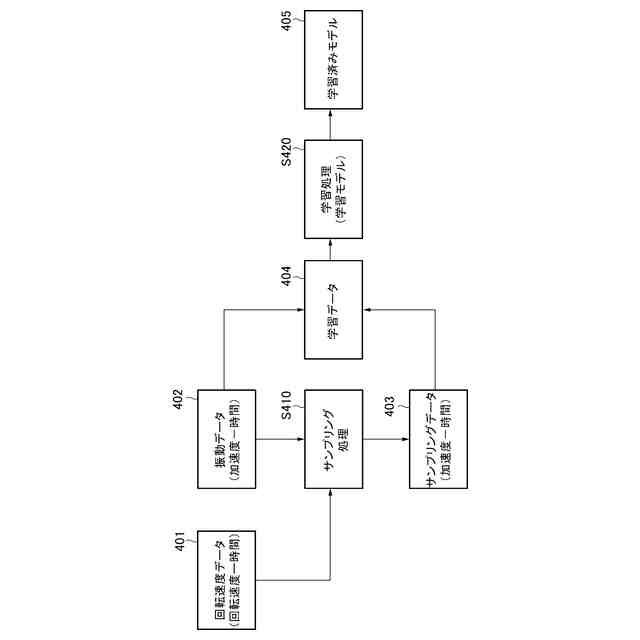
【解決手段】学習処理装置は、回転中の前記転がり軸受の回転速度を取得し、前記転がり軸受の1回転当たりのサンプリング数が所定の値となるように、前記回転速度に応じて、前記取得した振動データまたは音データからサンプリングするタイミングを導出し、前記導出されたタイミングに基づいて、前記取得した振動データまたは前記音データからサンプリングすることにより、サンプリングデータを生成し、前記取得した振動データまたは音データと、当該振動データまたは音データからのサンプリングデータを対応付けて学習データを生成し、所定の学習アルゴリズムを用い、前記生成した学習データのうちの振動データまたは音データを入力として、当該振動データまたは音データに対応するサンプリングデータに出力が近づくように学習処理を行うことで学習済みモデルを生成する。
【選択図】図4
特許請求の範囲
【請求項1】
回転中の転がり軸受の振動データまたは音データを取得する第1の取得手段と、
回転中の前記転がり軸受の回転速度を取得する第2の取得手段と、
前記転がり軸受の1回転当たりのサンプリング数が所定の値となるように、前記第2の取得手段にて取得した回転速度に応じて、前記第1の取得手段にて取得した振動データまたは音データからサンプリングするタイミングを導出する導出手段と、
前記導出手段にて導出されたタイミングに基づいて、前記第1の取得手段にて取得した振動データまたは前記音データからサンプリングすることにより、サンプリングデータを生成するサンプリング処理手段と、
前記第1の取得手段にて取得した振動データまたは音データと、当該振動データまたは音データからのサンプリングデータとを対応付けて学習データを生成する生成手段と、
所定の学習アルゴリズムを用い、前記生成手段にて生成した学習データのうちの振動データまたは音データを入力として、当該振動データまたは音データに対応するサンプリングデータに出力が近づくように学習処理を行うことで学習済みモデルを生成する学習手段と、
を有する学習処理装置。
続きを表示(約 2,300 文字)
【請求項2】
回転中の転がり軸受の振動データまたは音データを取得する取得手段と、
振動データまたは音データを入力した際に当該振動データまたは音データに対応するサンプリングデータを出力する学習済みモデルに対し、前記取得手段にて取得した振動データまたは音データを入力することにより、当該入力した振動データまたは音データに対応するサンプリングデータを生成する生成手段と、
前記生成手段にて生成したサンプリングデータを用いて、前記転がり軸受の状態を監視する監視手段と、
を有する状態監視装置。
【請求項3】
回転中の前記転がり軸受の回転速度を取得する第2の取得手段と、
前記第2の取得手段により回転速度が取得可能か否かを判定する判定手段と、
前記判定手段にて回転速度が取得可能であると判定された場合に、前記転がり軸受の1回転当たりのサンプリング数が所定の値となるように、前記第2の取得手段にて取得した回転速度に応じて、前記取得手段にて取得した振動データまたは音データからサンプリングするタイミングを導出する導出手段と、
前記導出手段にて導出されたタイミングに基づいて、前記取得手段にて取得した振動データまたは前記音データからサンプリングすることにより、サンプリングデータを生成するサンプリング処理手段と、
を更に備え、
前記監視手段は、前記判定手段にて回転速度が取得可能であると判定された場合に、前記サンプリング処理手段にて生成されたサンプリングデータを用いて、前記転がり軸受の状態を監視する、請求項2に記載の状態監視装置。
【請求項4】
請求項1に記載の学習処理装置と、
請求項2に記載の状態監視装置と、
を備える転がり軸受の監視システム。
【請求項5】
回転中の転がり軸受の振動データまたは音データを取得する第1の取得工程と、
回転中の前記転がり軸受の回転速度を取得する第2の取得工程と、
前記転がり軸受の1回転当たりのサンプリング数が所定の値となるように、前記第2の取得工程にて取得した回転速度に応じて、前記第1の取得工程にて取得した振動データまたは音データからサンプリングするタイミングを導出する導出工程と、
前記導出工程にて導出されたタイミングに基づいて、前記第1の取得工程にて取得した振動データまたは前記音データからサンプリングすることにより、サンプリングデータを生成するサンプリング処理工程と、
前記第1の取得工程にて取得した振動データまたは音データと、当該振動データまたは音データからのサンプリングデータとを対応付けて学習データを生成する生成工程と、
所定の学習アルゴリズムを用い、前記生成工程にて生成した学習データのうちの振動データまたは音データを入力として、当該振動データまたは音データに対応するサンプリングデータに出力が近づくように学習処理を行うことで学習済みモデルを生成する学習工程と、
を有する学習処理方法。
【請求項6】
回転中の転がり軸受の振動データまたは音データを取得する取得工程と、
振動データまたは音データを入力した際に当該振動データまたは音データに対応するサンプリングデータを出力する学習済みモデルに対し、前記取得工程にて取得した振動データまたは音データを入力することにより、当該入力した振動データまたは音データに対応するサンプリングデータを生成する生成工程と、
前記生成工程にて生成したサンプリングデータを用いて、前記転がり軸受の状態を監視する監視工程と、
を有する状態監視方法。
【請求項7】
コンピュータに、
回転中の転がり軸受の振動データまたは音データを取得する第1の取得工程と、
回転中の前記転がり軸受の回転速度を取得する第2の取得工程と、
前記転がり軸受の1回転当たりのサンプリング数が所定の値となるように、前記第2の取得工程にて取得した回転速度に応じて、前記第1の取得工程にて取得した振動データまたは音データからサンプリングするタイミングを導出する導出工程と、
前記導出工程にて導出されたタイミングに基づいて、前記第1の取得工程にて取得した振動データまたは前記音データからサンプリングすることにより、サンプリングデータを生成するサンプリング処理工程と、
前記第1の取得工程にて取得した振動データまたは音データと、当該振動データまたは音データからのサンプリングデータとを対応付けて学習データを生成する生成工程と、
所定の学習アルゴリズムを用い、前記生成工程にて生成した学習データのうちの振動データまたは音データを入力として、当該振動データまたは音データに対応するサンプリングデータに出力が近づくように学習処理を行うことで学習済みモデルを生成する学習工程と、
を実行させるためのプログラム。
【請求項8】
コンピュータに、
回転中の転がり軸受の振動データまたは音データを取得する取得工程と、
振動データまたは音データを入力した際に当該振動データまたは音データに対応するサンプリングデータを出力する学習済みモデルに対し、前記取得工程にて取得した振動データまたは音データを入力することにより、当該入力した振動データまたは音データに対応するサンプリングデータを生成する生成工程と、
前記生成工程にて生成したサンプリングデータを用いて、前記転がり軸受の状態を監視する監視工程と、
を実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、学習処理装置、状態監視装置、学習処理方法、状態監視方法、およびプログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、風力発電装置などの機械装置では、その内部に設けられる転がり軸受の状態を監視し、その状態に応じた制御を行うことで、機械装置の不具合などを防止し、より適切に動作させることが行われている。転がり軸受の状態監視に用いられる情報としては、振動、音、もしくは回転速度などが用いられている。
【0003】
特許文献1では、転がり軸受の回転速度の変化を考慮して、測定された振動情報からサンプリングを行い、そのサンプリングデータを用いて状態監視を行う構成が開示されている。特許文献1では、転がり軸受に連結された軸が1回転する間の瞬間的な回転速度の変化も想定して、サンプリングタイミングを導出している。
【先行技術文献】
【特許文献】
【0004】
特開2023-9580号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の構成では、転がり軸受の回転速度を測定するための回転速度センサを設置し、回転速度センサにて検出した回転速度を用いて状態監視を行っている。したがって、状態監視時において回転速度センサが必須となる構成である。一方、回転速度センサは取り付けに一定の制約があって設置が困難である場合や、回転速度センサ自体が正常に動作していない場合などの理由により、所望の状態監視時に回転速度情報を取得・利用できないことがあり得る。このような場合には、特許文献1の手法をそのまま利用することはできない。
【0006】
上記課題を鑑み、本発明は、転がり軸受の回転速度の変化の有無に関わらず、回転速度情報を用いずに転がり軸受の状態監視を可能とすることを目的とする。
【課題を解決するための手段】
【0007】
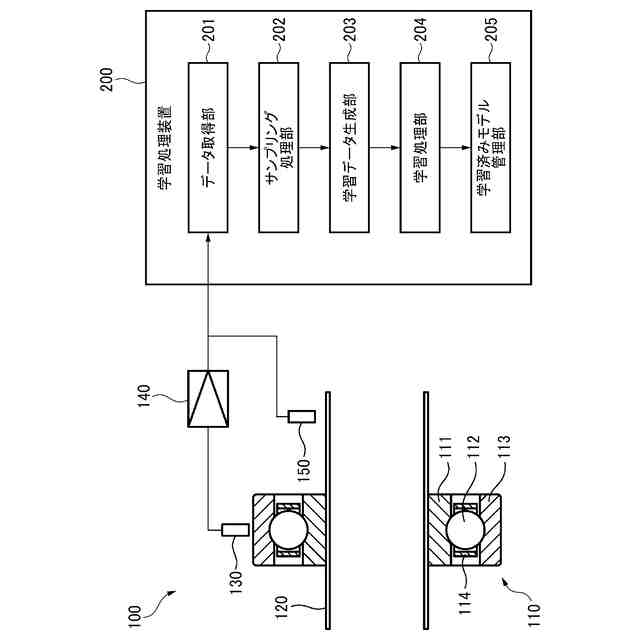
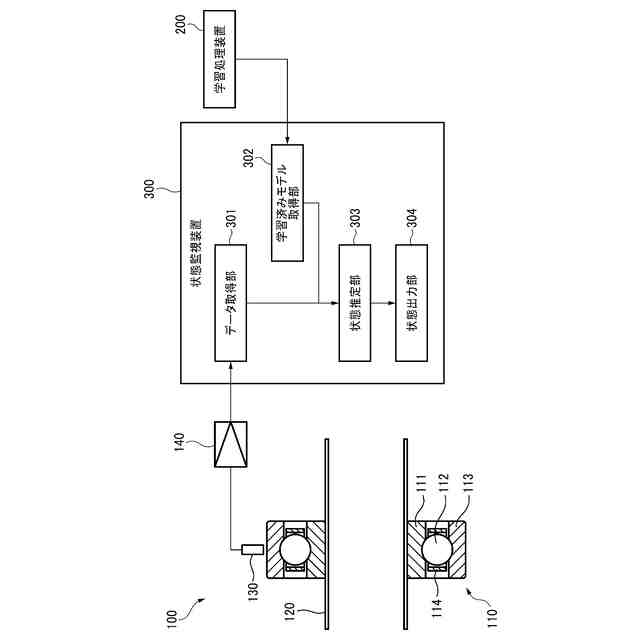
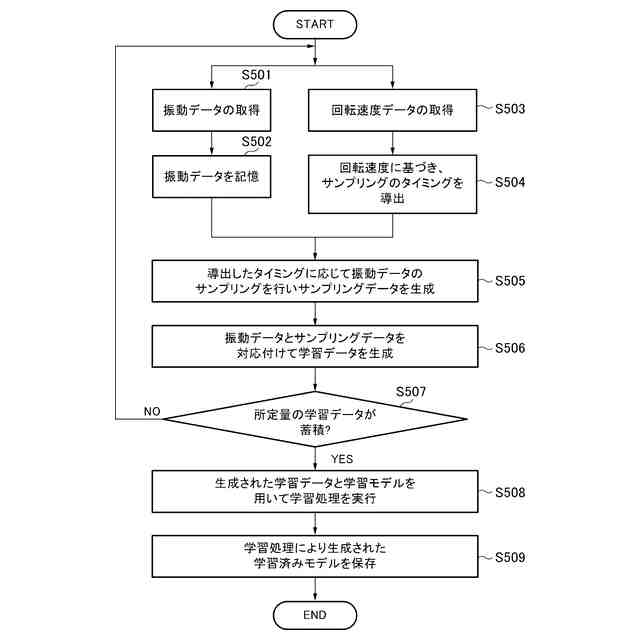
上記課題を解決するために本発明は以下の構成を有する。すなわち、学習処理装置は、
回転中の転がり軸受の振動データまたは音データを取得する第1の取得手段と、
回転中の前記転がり軸受の回転速度を取得する第2の取得手段と、
前記転がり軸受の1回転当たりのサンプリング数が所定の値となるように、前記第2の取得手段にて取得した回転速度に応じて、前記第1の取得手段にて取得した振動データまたは音データからサンプリングするタイミングを導出する導出手段と、
前記導出手段にて導出されたタイミングに基づいて、前記第1の取得手段にて取得した振動データまたは前記音データからサンプリングすることにより、サンプリングデータを生成するサンプリング処理手段と、
前記第1の取得手段にて取得した振動データまたは音データと、当該振動データまたは音データからのサンプリングデータとを対応付けて学習データを生成する生成手段と、
所定の学習アルゴリズムを用い、前記生成手段にて生成した学習データのうちの振動データまたは音データを入力として、当該振動データまたは音データに対応するサンプリングデータに出力が近づくように学習処理を行うことで学習済みモデルを生成する学習手段と、
を有する。
【0008】
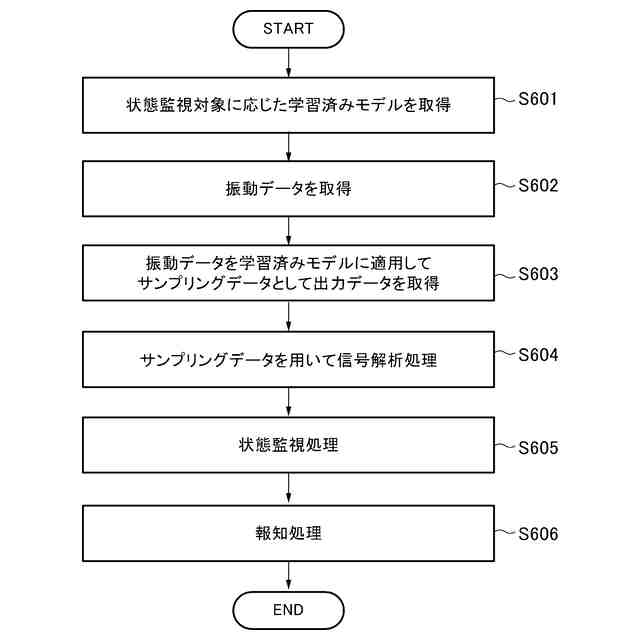
また、本発明の別の形態は以下の構成を有する。すなわち、状態監視装置は、
回転中の転がり軸受の振動データまたは音データを取得する取得手段と、
振動データまたは音データを入力した際に当該振動データまたは音データに対応するサンプリングデータを出力する学習済みモデルに対し、前記取得手段にて取得した振動データまたは音データを入力することにより、当該入力した振動データまたは音データに対応するサンプリングデータを生成する生成手段と、
前記生成手段にて生成したサンプリングデータを用いて、前記転がり軸受の状態を監視する監視手段と、
を有する。
【0009】
また、本発明の別の形態は以下の構成を有する。すなわち、学習処理方法は、
回転中の転がり軸受の振動データまたは音データを取得する第1の取得工程と、
回転中の前記転がり軸受の回転速度を取得する第2の取得工程と、
前記転がり軸受の1回転当たりのサンプリング数が所定の値となるように、前記第2の取得工程にて取得した回転速度に応じて、前記第1の取得工程にて取得した振動データまたは音データからサンプリングするタイミングを導出する導出工程と、
前記導出工程にて導出されたタイミングに基づいて、前記第1の取得工程にて取得した振動データまたは前記音データからサンプリングすることにより、サンプリングデータを生成するサンプリング処理工程と、
前記第1の取得工程にて取得した振動データまたは音データと、当該振動データまたは音データからのサンプリングデータとを対応付けて学習データを生成する生成工程と、
所定の学習アルゴリズムを用い、前記生成工程にて生成した学習データのうちの振動データまたは音データを入力として、当該振動データまたは音データに対応するサンプリングデータに出力が近づくように学習処理を行うことで学習済みモデルを生成する学習工程と、
を有する。
【0010】
また、本発明の別の形態は以下の構成を有する。すなわち、状態監視方法は、
回転中の転がり軸受の振動データまたは音データを取得する取得工程と、
振動データまたは音データを入力した際に当該振動データまたは音データに対応するサンプリングデータを出力する学習済みモデルに対し、前記取得工程にて取得した振動データまたは音データを入力することにより、当該入力した振動データまたは音データに対応するサンプリングデータを生成する生成工程と、
前記生成工程にて生成したサンプリングデータを用いて、前記転がり軸受の状態を監視する監視工程と、
を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精工株式会社
減速機
21日前
日本精工株式会社
玉軸受
11日前
日本精工株式会社
モータ
9日前
日本精工株式会社
加工装置
7日前
日本精工株式会社
ころ軸受
11日前
日本精工株式会社
ボールねじ
今日
日本精工株式会社
ボールねじ
1か月前
日本精工株式会社
ボールねじ
今日
日本精工株式会社
軸受吊り具
21日前
日本精工株式会社
ボールねじ
9日前
日本精工株式会社
台車搬送装置
1か月前
日本精工株式会社
台車搬送装置
1か月前
日本精工株式会社
リニアガイド
1か月前
日本精工株式会社
信号出力回路
1か月前
日本精工株式会社
回転機械装置
22日前
日本精工株式会社
駆動輪及び台車
21日前
日本精工株式会社
駆動輪及び台車
21日前
日本精工株式会社
駆動輪及び台車
21日前
日本精工株式会社
ボールねじ装置
今日
日本精工株式会社
ボールねじ装置
9日前
日本精工株式会社
ボールねじ装置
9日前
日本精工株式会社
ボールねじ装置
1か月前
日本精工株式会社
情報取得システム
7日前
日本精工株式会社
ハブユニット軸受
1か月前
日本精工株式会社
自動調心ころ軸受
3日前
日本精工株式会社
ステアリング装置
2か月前
日本精工株式会社
こま式ボールねじ
1か月前
日本精工株式会社
ハブユニット軸受
1か月前
日本精工株式会社
磁歪式トルクセンサ
1か月前
日本精工株式会社
軸受吊り具及び軸受
21日前
日本精工株式会社
軸受吊り具及び軸受
21日前
日本精工株式会社
軸受吊り具及び軸受
21日前
日本精工株式会社
保持器及び転がり軸受
23日前
日本精工株式会社
トロイダル型無段変速機
今日
日本精工株式会社
制御装置および制御方法
2か月前
日本精工株式会社
センサ付ハブユニット軸受
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ