TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025083008
公報種別
公開特許公報(A)
公開日
2025-05-30
出願番号
2023196622
出願日
2023-11-20
発明の名称
移動ロボットの位置推定システム
出願人
清水建設株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
G05D
1/85 20240101AFI20250523BHJP(制御;調整)
要約
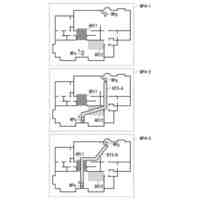
【課題】建物の屋内において、移動ロボットの自己位置の見失いを抑制でき、移動ロボットを正確かつ円滑に移動させ易い、移動ロボットの位置推定システムを提供すること。
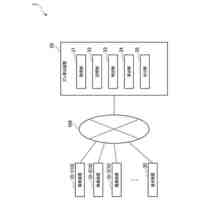
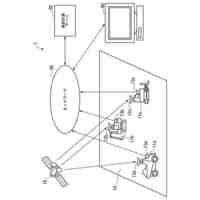
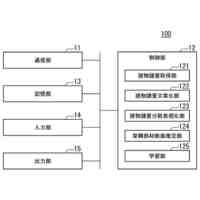
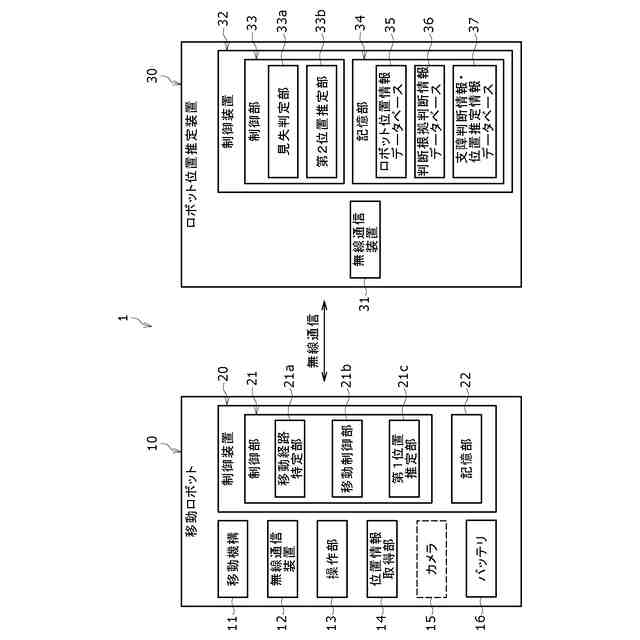
【解決手段】位置推定システム1が、移動ロボット10が自己位置を見失ったときの異常動作情報が記憶されている記憶部34と、移動ロボット10が実際に行った動作情報と上記異常動作情報とに基づいて移動ロボット10が自己位置を見失ったか否か判定する見失判定部33aと、見失判定部33aが自己位置を見失ったと判定したときに位置情報取得部14からの位置情報に基づいて移動ロボット10の位置を推定する第2位置推定部33bを備える。移動制御部21bが、第2位置推定部33bが推定した推定位置に基づいて移動ロボット10の移動を制御する。
【選択図】図2
特許請求の範囲
【請求項1】
位置を推定するための情報を取得する位置情報取得部、前記位置情報取得部からの位置情報に基づいて前記位置を推定する第1位置推定部、及び前記第1位置推定部が推定した第1推定位置に基づいて移動を制御する移動制御部を有する移動ロボットと、
前記移動ロボットが前記位置を見失ったときの異常動作情報が記憶されている記憶部と、
前記移動ロボットが実際に行った動作情報と前記異常動作情報とに基づいて前記移動ロボットが前記位置を見失ったか否か判定する見失判定部と、
前記見失判定部が前記位置を見失ったと判定したときに前記位置情報に基づいて前記位置を推定する第2位置推定部と、を備え、
前記移動制御部が、前記第2位置推定部が推定した第2推定位置に基づいて前記移動ロボットの移動を制御する、移動ロボットの位置推定システム。
続きを表示(約 1,100 文字)
【請求項2】
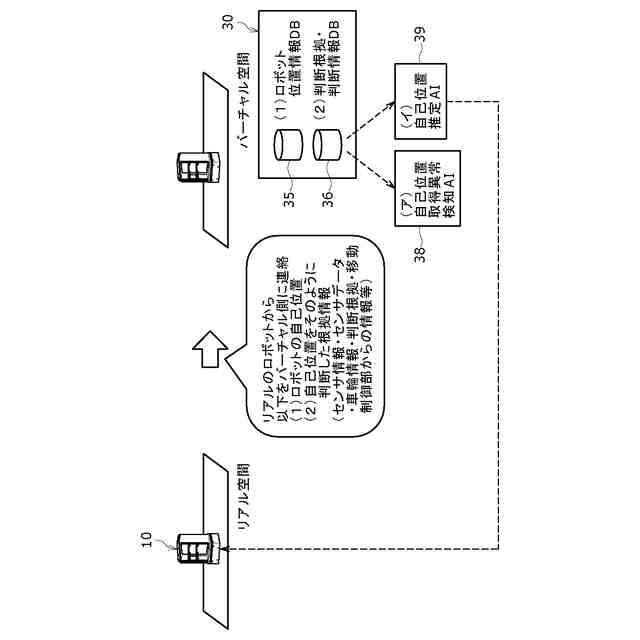
前記記憶部、前記見失判定部、前記第2位置推定部、及び無線通信装置を有すると共に、前記移動ロボットの外部に設けられるロボット位置推定装置を備え、
前記無線通信装置は、前記第2推定位置を特定できる情報を前記移動ロボットに向けて無線で送信する、請求項1に記載の移動ロボットの位置推定システム。
【請求項3】
前記見失判定部が前記位置を見失ったと判定する前記移動ロボットの異常動作に、前記移動ロボットが10秒以内の時間に停止と旋回を含む動作とを2回以上繰り返す停止旋回繰返動作が含まれる、請求項1又は2に記載の移動ロボットの位置推定システム。
【請求項4】
前記見失判定部が前記位置を見失ったと判定する前記移動ロボットの異常動作に、前記移動ロボットが10秒以内の時間に互いに異なる方向を向いた状態で3回以上停止する方向特定不能動作が含まれる、請求項1又は2に記載の移動ロボットの位置推定システム。
【請求項5】
前記見失判定部が前記位置を見失ったと判定する度に前記見失判定部が前記位置を見失ったと判定する根拠となった前記移動ロボットの事後の異常動作情報が、新たな前記異常動作情報として前記記憶部に記憶される、請求項1又は2に記載の移動ロボットの位置推定システム。
【請求項6】
前記見失判定部が前記位置を見失ったと判定して前記第2位置推定部が前記第2推定位置を推定する度に、前記第2位置推定部が推定した前記第2推定位置を特定できる情報が、前記事後の異動動作情報に関連付けられた状態で前記記憶部に記憶される請求項5に記載の移動ロボットの位置推定システム。
【請求項7】
前記位置情報取得部がカメラを含み、
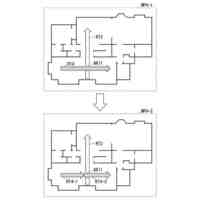
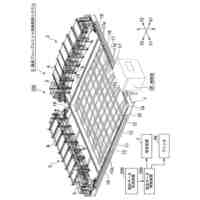
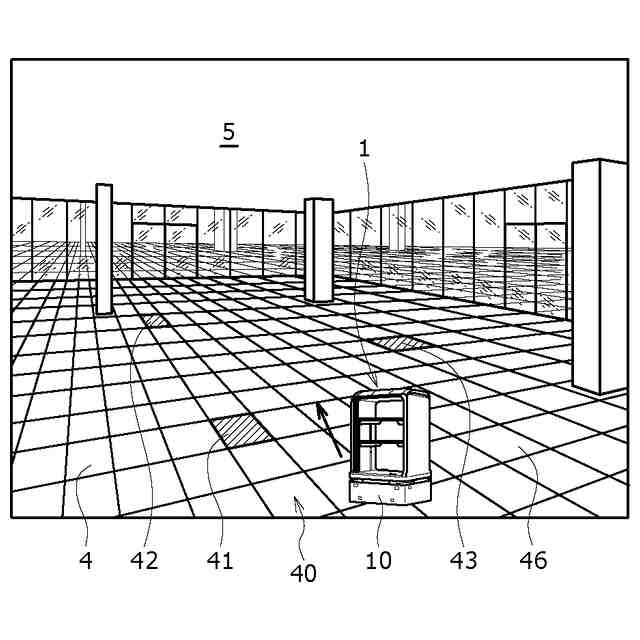
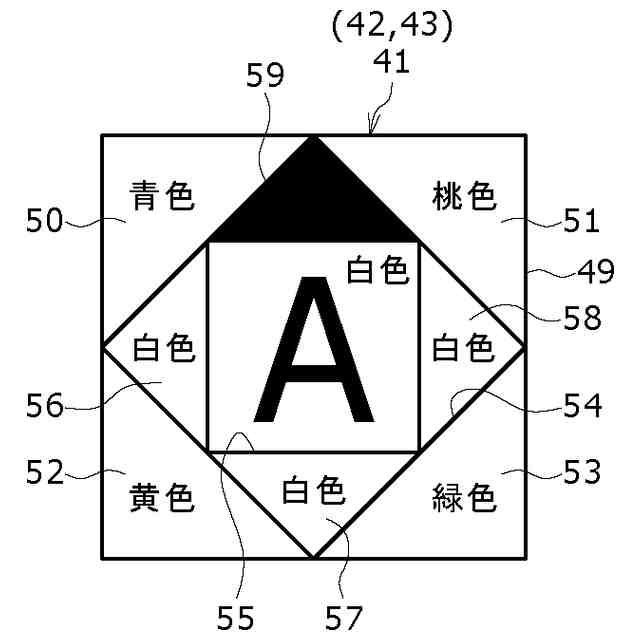
前記移動ロボットが移動する床面が、前記床面上における2次元位置を特定できると共に、模様、形状、及び色彩のうちの少なくとも一つを含む1以上の位置特定用形態部を有し、
前記第1位置推定部が、前記カメラが撮影した前記位置特定用形態部の少なくとも一部の撮影情報に基づいて前記第1推定位置を推定する、請求項1又は2に記載の移動ロボットの位置推定システム。
【請求項8】
床面上における2次元位置を特定できると共に、模様、形状、及び色彩のうちの少なくとも一つを含む1以上の位置特定用形態部を有する前記床面と、
前記床面を撮影可能なカメラ、前記カメラが撮影した前記位置特定用形態部の少なくとも一部の撮影情報に基づいて位置を推定する位置推定部、及び前記位置推定部が推定した推定位置に基づいて移動を制御する移動制御部を有する移動ロボットと、
を備える、移動ロボットの位置推定システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動ロボットの位置推定システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、移動ロボットの位置推定システムとしては、特許文献1に記載されているものがある。この位置推定システムでは、移動ロボットがライダーセンサと記憶部を備える。この位置推定システムでは、移動ロボットがライダーセンサを介して取得した地形情報を記憶部に予め記憶されている地形情報と比較することで移動ロボットの存在位置を推定する。
【先行技術文献】
【特許文献】
【0003】
特許7356566号
【発明の概要】
【発明が解決しようとする課題】
【0004】
本件発明者は、次の新規の課題を見出した。詳しくは、屋内空間で、移動ロボットが自己位置を見失って、任務を遂行できなくなる場合があることを見出した。また、特に、建物の大空間アトリウムの内部のように、天井が高くて、広い屋内空間で、かつ、ガラス壁で囲まれたような空間の場合に、移動ロボットが搭載しているライダーセンサ等のセンサが出射した波(例えばレーザーや光線など)が、側壁を透過する等して側壁でうまく反射しなくて、移動ロボットが反射波の情報を取得しにくい場合が生じ易くなり、移動ロボットが移動に支障をきたす場合が顕著になることを見出した。そこで、本開示の目的は、建物の屋内において、移動ロボットの自己位置の見失いを抑制でき、移動ロボットを正確かつ円滑に移動させ易い、移動ロボットの位置推定システムを提供することにある。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本開示に係る移動ロボットの位置推定システムは、位置を推定するための情報を取得する位置情報取得部、前記位置情報取得部からの位置情報に基づいて前記位置を推定する第1位置推定部、及び前記第1位置推定部が推定した第1推定位置に基づいて移動を制御する移動制御部を有する移動ロボットと、前記移動ロボットが前記位置を見失ったときの異常動作情報が記憶されている記憶部と、前記移動ロボットが実際に行った動作情報と前記異常動作情報とに基づいて前記移動ロボットが前記位置を見失ったか否か判定する見失判定部と、前記見失判定部が前記位置を見失ったと判定したときに、前記位置情報に基づいて前記位置を推定する第2位置推定部と、を備え、前記移動制御部が、前記第2位置推定部が推定した第2推定位置に基づいて前記移動ロボットの移動を制御する。
【0006】
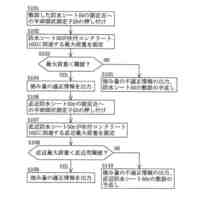
本開示において、見失判定部は、例えば、移動制御部からの情報に基づいて移動ロボットの実際の動作情報を特定する。動作情報とは、例えば、移動ロボットが実際に移動した軌跡に関する情報である。また、見失判定部は、移動ロボットが実際に行った動作情報と上記異常動作情報に加えて、上記位置情報も参照して、移動ロボットの位置の見失の有無を判定してもよい。
【0007】
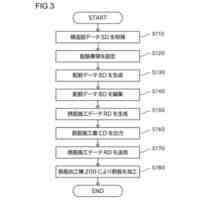
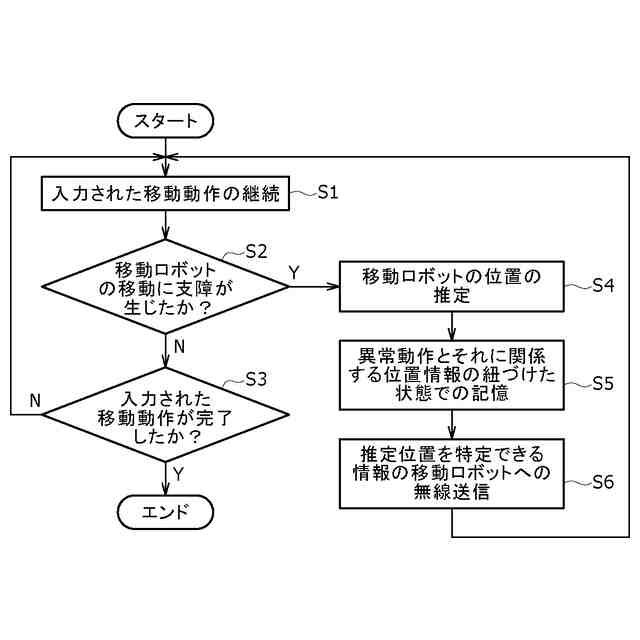
本開示の技術では、例えば、移動ロボットを意図する用途で実際に使用する前に、事前に用途を行う対象領域の床面を走行させてデータ取りを行う。そして、例えば、移動ロボットが意図通りの走行をした場合の動作情報とあわせて、移動ロボットが走行に支障をきたした異常動作と、支障をきたした領域(位置)の情報とを関連付けて記憶部に記憶しておく。
【0008】
例えば、特徴がある異常動作のうちの第1動作を行って、走行に支障をきたした場合、第1動作の情報と、その第1動作をきたした領域における正常動作の情報と、その第1動作に関係する位置(例えば、第1動作の開始位置)の位置情報(例えば、第1動作を行っている最中に位置情報取得部が取得した情報や、第1動作を開始するまでの位置情報取得部が継続的に取得した(時系列的に取得した)連続情報等)とを関連付けて記憶部に記憶する。
【0009】
ここで、連続情報は、例えば、車輪の回転数の情報及び車輪が向いた方向の情報の連続情報でもよく、移動ロボットの動作開始位置に基づいて移動ロボットの存在位置を帰納法的に演算できる連続情報でもよい。
【0010】
そして、このような3つの情報が関連付けられた複数(例えば、20以上、好ましくは80以上、更に好ましくは100以上)のデータを、例えば、事前に記憶部に記憶され、記憶部を参照できる見失判定部及び第2位置推定部に事前に学習させておく。見失判定部及び第2位置推定部の夫々は、互いに異なる人工知能(AI:artificial intelligence)で構成されてもよく、1つの人工知能が見失判定部及び第2位置推定部の両方を含む構成でもよい。また、見失判定部及び第2位置推定部のうちの少なくとも1つは、人工知能でない制御部が判断してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
清水建設株式会社
配筋装置
4日前
清水建設株式会社
外壁構造
21日前
清水建設株式会社
化粧カバー
3日前
清水建設株式会社
鉄筋把持装置
4日前
清水建設株式会社
情報処理装置
10日前
清水建設株式会社
配筋高さ調整機構
4日前
清水建設株式会社
製炭炉、製炭方法
3日前
清水建設株式会社
導電線の回収方法
1か月前
清水建設株式会社
汚染拡散防止構造
28日前
清水建設株式会社
配筋の千鳥調整機構
4日前
清水建設株式会社
加熱井戸の設置方法
28日前
清水建設株式会社
コンクリートの施工方法
11日前
清水建設株式会社
建築部材および空調システム
今日
清水建設株式会社
ソイルセメントおよびその製造方法
1か月前
清水建設株式会社
再エネ制御システム、再エネ制御方法
1か月前
清水建設株式会社
低透水層の施工方法および低透水層構造
11日前
清水建設株式会社
ズレ算出装置、施工方法及びズレ算出方法
1か月前
清水建設株式会社
角部用タブおよび四面ボックスの溶接方法
27日前
清水建設株式会社
木質耐火被覆鉄骨部材およびその施工方法
12日前
清水建設株式会社
出力精度確認システム及び出力精度確認方法
1か月前
清水建設株式会社
ガス回収装置、ビル空調システム、ガス回収方法
21日前
清水建設株式会社
床版割付装置、床版割付方法、およびプログラム
1か月前
公益財団法人鉄道総合技術研究所
樹脂吹付け方法
10日前
清水建設株式会社
情報処理システム、情報処理方法、およびプログラム
1か月前
清水建設株式会社
地形計測装置、地形計測システム、及び地形計測方法
今日
清水建設株式会社
トンネル防水シートの施工管理装置及び施工管理方法
26日前
清水建設株式会社
情報処理システム、情報処理方法、およびプログラム
1か月前
清水建設株式会社
土壌資材、土壌資材の設計方法および土壌資材の製造方法
今日
清水建設株式会社
作業板の取付治具、作業板の設置方法及び作業板の安全設備
1か月前
清水建設株式会社
スリムケーソン工法に用いる揚重構造およびスリムケーソン工法
19日前
清水建設株式会社
ジオポリマー、ジオポリマーの固化物、放射性廃棄物の処理方法、
4日前
清水建設株式会社
情報処理システム、情報処理装置、情報処理方法、およびプログラム
1か月前
清水建設株式会社
設定データ供給装置、設定データ共有システム、設定データ供給方法
4日前
清水建設株式会社
情報処理システム、情報処理装置、情報処理方法、およびプログラム
11日前
清水建設株式会社
工事支援装置、鉄筋加工支援システム、工事支援方法、および、コンピュータプログラム
4日前
清水建設株式会社
ジオポリマー、ジオポリマーの固化物、ジオポリマーの製造方法、放射性廃棄物の処理方法
4日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ