TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025121591
公報種別
公開特許公報(A)
公開日
2025-08-20
出願番号
2024017124
出願日
2024-02-07
発明の名称
情報処理システム、情報処理方法、およびプログラム
出願人
清水建設株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/225 20240101AFI20250813BHJP(制御;調整)
要約
【課題】自律移動体が移動する移動経路について周囲の状況に応じて適切に計画する。
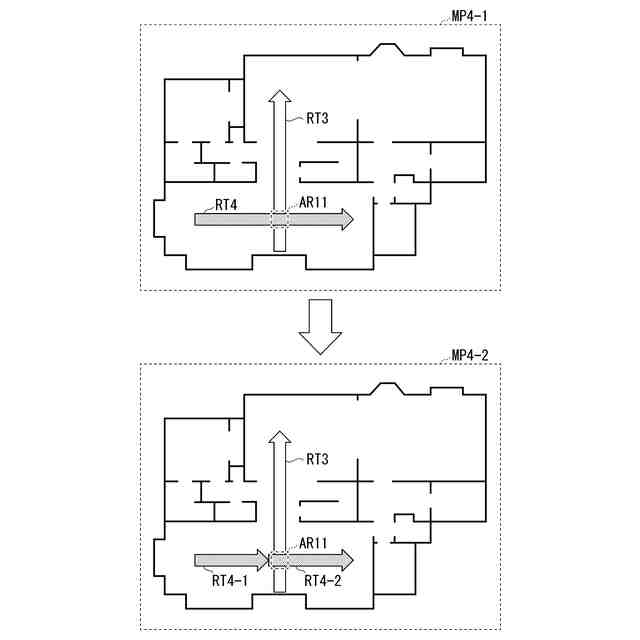
【解決手段】制御対象空間における事象について時間と空間とを定義した事象情報として、自律移動体の移動時間と移動経路とを定義した運転計画を含む移動体事象情報を処理対象として処理し、処理対象の移動体事象情報に含まれる運転計画と、他の事象情報が定義する所定の事象との重なり状況に応じて、前記処理対象の移動体事象情報の運転計画を複数の運転計画に分割するように変更する事象処理部を備えて情報処理システムを構成する。
【選択図】図11
特許請求の範囲
【請求項1】
対象空間における事象について時間と空間とを定義した事象情報として、自律移動体の移動時間と移動経路とを定義した運転計画を含む移動体事象情報を処理対象として処理し、
処理対象の移動体事象情報に含まれる運転計画と、他の事象情報との重なり状況に応じて、前記処理対象の移動体事象情報の運転計画を複数の分割運転計画に分割するように変更する事象処理部
を備える情報処理システム。
続きを表示(約 940 文字)
【請求項2】
前記事象処理部は、前記処理対象の移動体事象情報に含まれる運転計画について、他の移動体事象情報が定義する他の運転計画により移動する自律移動体と衝突する位置と時刻とを分割点として分割する
請求項1に記載の情報処理システム。
【請求項3】
前記事象処理部は、前記処理対象の移動体事象情報に含まれる運転計画について、前記他の事象情報が定義する特定領域の位置と当該特定領域に到達する時刻とを分割点として分割する
請求項1または2に記載の情報処理システム。
【請求項4】
前記特定領域は安全確認が要求される領域であって、
前記事象処理部は、前記分割点以前の第1分割運転計画により前記特定領域に到達した自律移動体を停止させ、停止位置にて前記特定領域の安全が確認されたことに応じて、前記分割点以降の第2分割運転計画に応じて自律移動体が移動を再開させることを指示する情報を、処理対象の移動体事象情報に対応付ける
請求項3に記載の情報処理システム。
【請求項5】
情報処理システムにおける情報処理方法であって、
事象処理部が、対象空間における事象について時間と空間とを定義した事象情報として、自律移動体の移動時間と移動経路とを定義した運転計画を含む移動体事象情報を処理対象として処理し、
処理対象の移動体事象情報に含まれる運転計画と、他の事象情報との重なり状況に応じて、前記処理対象の移動体事象情報の運転計画を複数の分割運転計画に分割するように変更する事象処理ステップ
を含む情報処理方法。
【請求項6】
情報処理システムにおけるコンピュータを、
対象空間における事象について時間と空間とを定義した事象情報として、自律移動体の移動時間と移動経路とを定義した運転計画を含む移動体事象情報を処理対象として処理し、
処理対象の移動体事象情報に含まれる運転計画と、他の事象情報が定義する所定の事象との重なり状況に応じて、前記処理対象の移動体事象情報の運転計画を複数の分割運転計画に分割するように変更する事象処理部
として機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理システム、情報処理方法、およびプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
マップにおいて選択された第1位置点から第2位置点までの移動経路を予め決められた移動経路解析ルールに従って解析し、解析した移動経路によりロボットを移動させるように制御する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6800989号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自律移動体を移動させるにあたっては、自律移動体の移動計画について周囲の状況に応じて適切に計画されることが好ましい。
【0005】
本発明は、上記した課題を考慮して、自律移動体の移動計画について周囲の状況に応じて適切に計画されるようにすることを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決する本発明の一態様は、対象空間における事象について時間と空間とを定義した事象情報として、自律移動体の移動時間と移動空間とを定義した運転計画を含む移動体事象情報を処理対象として処理し、処理対象の移動体事象情報に含まれる運転計画と、他の事象情報が定義する所定の事象との重なり状況に応じて、前記処理対象の移動体事象情報の運転計画を複数の分割運転計画に分割するように変更する事象処理部を備える情報処理システムである。
【0007】
本発明の一態様は、情報処理システムにおける情報処理方法であって、事象処理部が、対象空間における事象について時間と空間とを定義した事象情報として、自律移動体の移動時間と移動経路とを定義した運転計画を含む移動体事象情報を処理対象として処理し、処理対象の移動体事象情報に含まれる運転計画と、他の事象情報が定義する所定の事象との重なり状況に応じて、前記処理対象の移動体事象情報の運転計画を複数の分割運転計画に分割するように変更する事象処理ステップを含む情報処理方法である。
【0008】
本発明の一態様は、情報処理システムにおけるコンピュータを、対象空間における事象について時間と空間とを定義した事象情報として、自律移動体の移動時間と移動経路とを定義した運転計画を含む移動体事象情報を処理対象として処理し、処理対象の移動体事象情報に含まれる運転計画と、他の事象情報が定義する所定の事象との重なり状況に応じて、前記処理対象の移動体事象情報の運転計画を複数の分割運転計画に分割するように変更する事象処理部として機能させるためのプログラムである。
【発明の効果】
【0009】
本発明によれば、自律移動体の移動計画について周囲の状況に応じて適切に計画することが可能になるとの効果が得られる。
【図面の簡単な説明】
【0010】
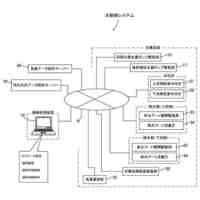
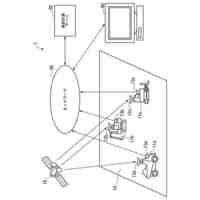
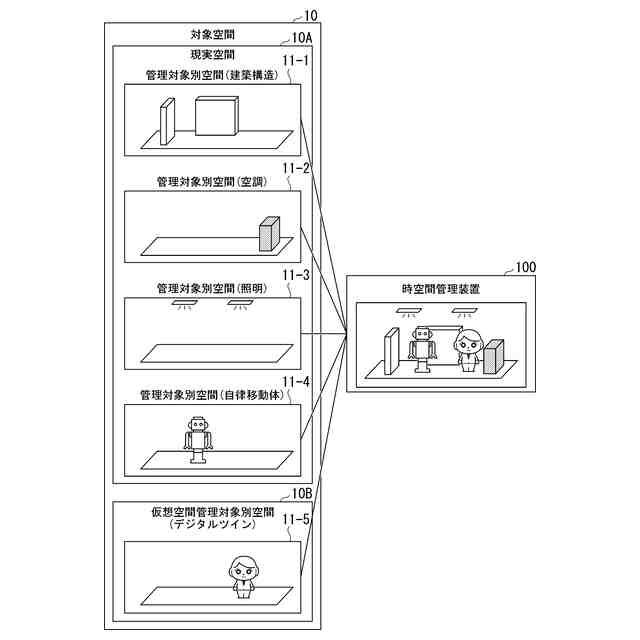
本実施形態における時空間管理システムの概念的構成を示す図である。
本実施形態における時空間管理システムによるイベント登録の手順の一具体例を示す図である。
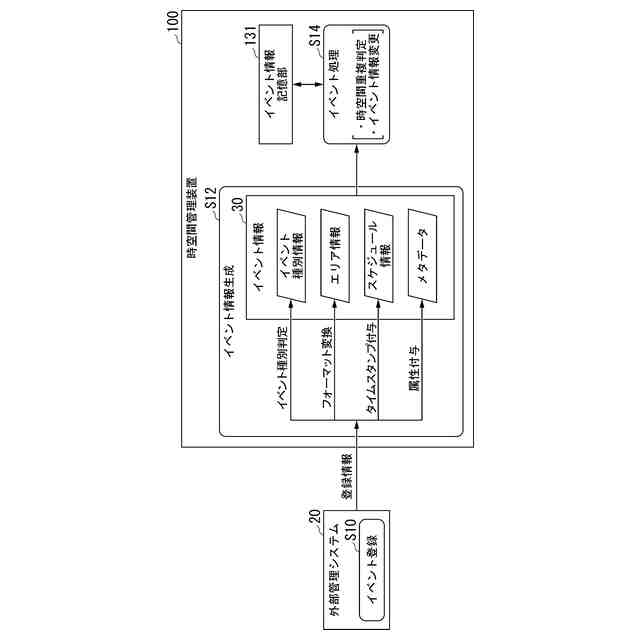
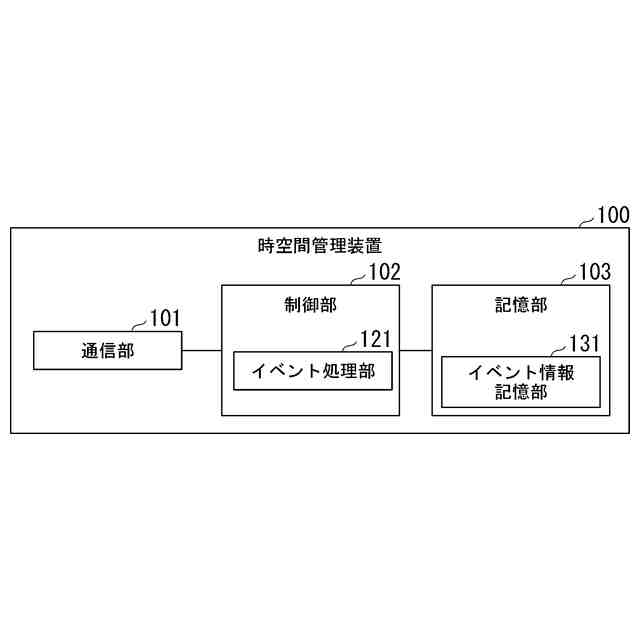
本実施形態における時空間管理装置の機能構成例を示す図である。
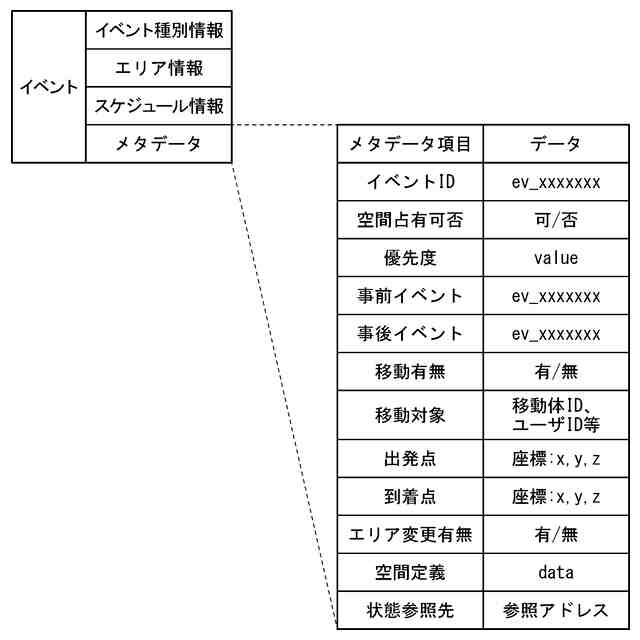
本実施形態におけるイベント情報の構造例を示す図である。
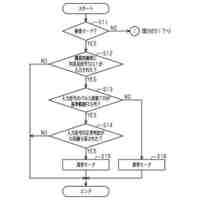
本実施形態の時空間管理システムにおけるイベントの登録に応じた処理手順例を示すフローチャートである。
本実施形態におけるイベント情報のフォーマット変換の一例を示す図である。
本実施形態におけるイベント情報のフォーマット変換の一例を示す図である。
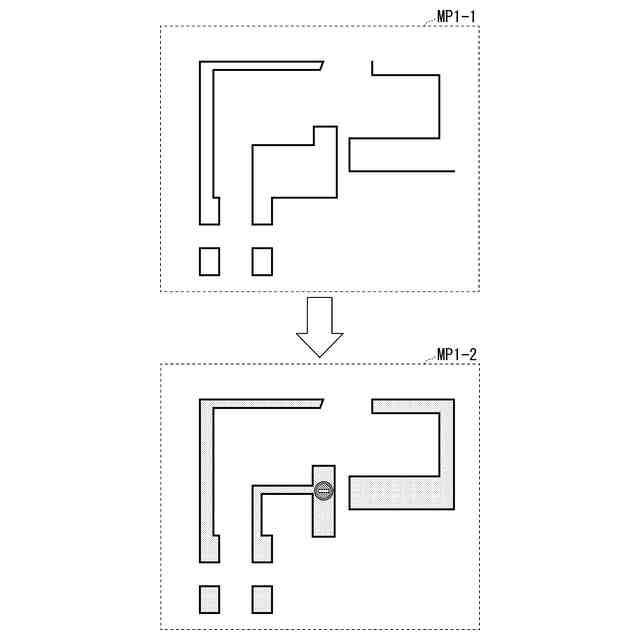
本実施形態における時空間管理装置による空間制御の一例を示す図である。
本実施形態における時空間管理装置による空間制御の一例を示す図である。
本実施形態において図9に対応するタイムスケジュールを示す図である。
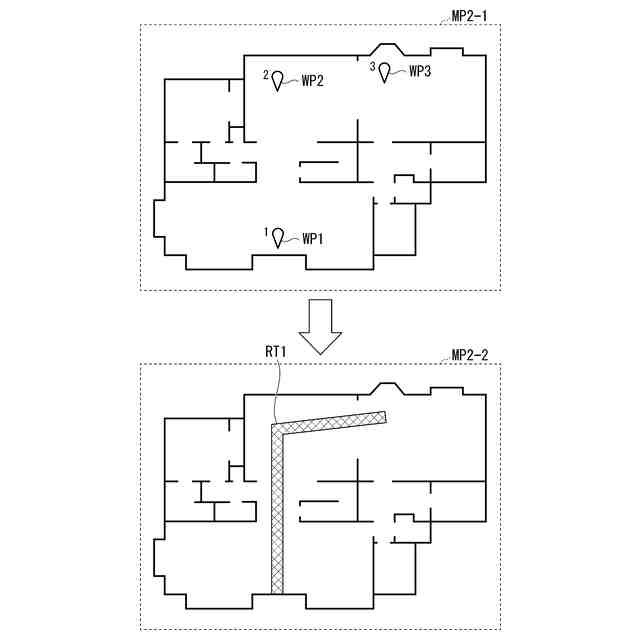
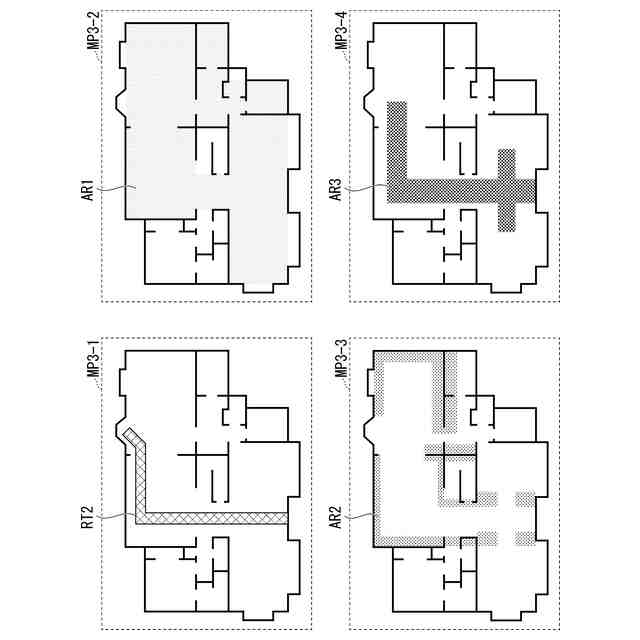
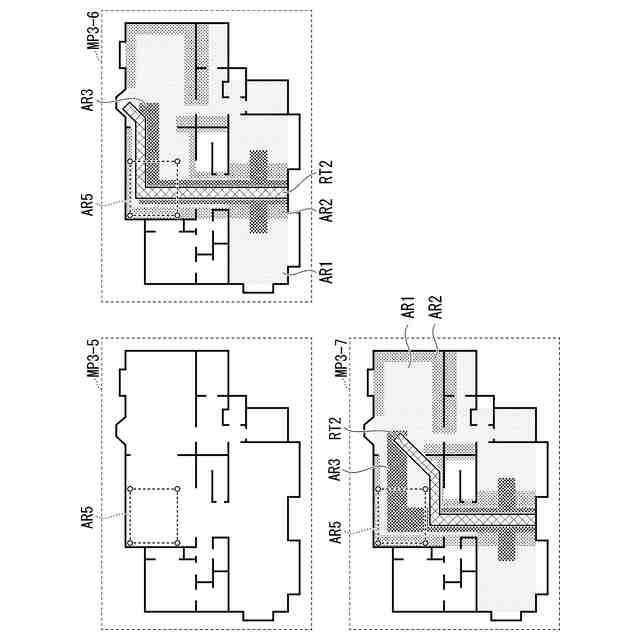
本実施形態における時空間管理装置による空間制御の第2例を説明する図である。
本実施形態における時空間管理装置による空間制御の第2例を説明する図である。
本実施形態における時空間管理装置による空間制御の第3例を説明する図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
清水建設株式会社
建築構造
5日前
清水建設株式会社
水制御システム
10日前
清水建設株式会社
製炭炉、製炭方法
23日前
清水建設株式会社
遮水層の構築方法
9日前
清水建設株式会社
床吹き出し空調装置
9日前
清水建設株式会社
免震装置の基礎構造
10日前
清水建設株式会社
ボルトによる接合構造
16日前
清水建設株式会社
建築部材および空調システム
20日前
清水建設株式会社
変位計測装置および変位計測方法
5日前
清水建設株式会社
中間階免震建物の免震層の構築方法
10日前
清水建設株式会社
ケーソンの施工方法および施工補助装置
18日前
清水建設株式会社
鉄筋の放射線漏洩線量減少率評価方法及び解析装置
16日前
清水建設株式会社
施工時CO2排出量の推定方法および推定システム
16日前
清水建設株式会社
金属造形物の造形装置および金属造形物の造形方法
11日前
清水建設株式会社
地形計測装置、地形計測システム、及び地形計測方法
20日前
清水建設株式会社
土壌資材、土壌資材の設計方法および土壌資材の製造方法
20日前
清水建設株式会社
鉄筋の突合わせ接合構造及び鉄筋接続用スリーブの圧縮装置
16日前
清水建設株式会社
陰イオン吸着体、陰イオン吸着体の製造方法、陰イオン吸着方法
16日前
清水建設株式会社
情報処理装置、情報処理システム、情報処理方法、および、プログラム
10日前
株式会社神戸製鋼所
ジオポリマー組成物、ジオポリマー硬化体およびジオポリマー硬化体の製造方法
9日前
株式会社神戸製鋼所
ジオポリマー組成物、ジオポリマー硬化体およびジオポリマー硬化体の製造方法
9日前
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社カネカ
製造システム
1か月前
オムロン株式会社
スレーブ装置
20日前
株式会社熊谷組
障害物の検出方法
11日前
愛知製鋼株式会社
車両用システム
1か月前
ローム株式会社
基準電圧源
1か月前
個人
作業車両自動化システム
2か月前
新電元工業株式会社
作業用ロボット
9日前
愛知製鋼株式会社
目標軌跡の設定方法
2か月前
豊田合成株式会社
機器制御装置
16日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
移動制御システム
2か月前
トヨタ自動車株式会社
生産管理システム
2か月前
株式会社ダイフク
搬送設備
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ