TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025089034
公報種別
公開特許公報(A)
公開日
2025-06-12
出願番号
2023203973
出願日
2023-12-01
発明の名称
コンプライアンスユニット
出願人
SMC株式会社
代理人
弁理士法人桐朋
主分類
B25J
17/02 20060101AFI20250605BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】テーブル支持部をベース部材に対して原点位置に確実に復帰させることができるテーブルユニットを提供する。
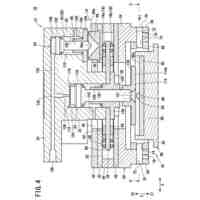
【解決手段】コンプライアンスユニット10は、ベース部材12と、テーブル支持部14と、コンプライアンス機構16と、テーブルユニット18と、を備え、ベース部材には、第1流体圧シリンダによってテーブル支持部をベース部材に対する原点位置に復帰させた状態でテーブルユニットに向かって第2押圧部114を押し付けることにより、テーブルユニットを、テーブルユニットのテーブル板82がXY平面に対して傾斜した傾斜姿勢からテーブル板がXY平面に沿うような原点姿勢に復帰させる第2流体圧シリンダ112が設けられている。
【選択図】図4
特許請求の範囲
【請求項1】
ベース部材と、
X方向に直交する方向をY方向としたXY平面に沿って前記ベース部材に対して移動可能に配置されたテーブル支持部と、
前記ベース部材および前記テーブル支持部に対して前記X方向および前記Y方向に移動可能なように前記ベース部材と前記テーブル支持部の間に介在されたコンプライアンス機構と、
前記X方向または前記Y方向に沿って延在した仮想線を中心に傾動可能に前記テーブル支持部に設けられたテーブルユニットと、
を備え、
前記ベース部材には、
前記テーブル支持部に向かって第1押圧部を押し付けることにより前記テーブル支持部を前記ベース部材に対する原点位置に復帰させる第1流体圧シリンダと、
前記第1流体圧シリンダによって前記テーブル支持部を前記ベース部材に対する前記原点位置に復帰させた状態で前記テーブルユニットに向かって第2押圧部を押し付けることにより、前記テーブルユニットを、前記テーブルユニットのテーブル板が前記XY平面に対して傾斜した傾斜姿勢から前記テーブル板が前記XY平面に沿うような原点姿勢に復帰させる第2流体圧シリンダと、
が設けられている、コンプライアンスユニット。
続きを表示(約 660 文字)
【請求項2】
請求項1に記載のコンプライアンスユニットであって、
前記ベース部材には、
シリンダ駆動用の流体を前記第1流体圧シリンダに導入し得る第1流路と、
前記第1流路に連通し、前記流体を前記第2流体圧シリンダに導入し得る第2流路と、
前記第2流路に位置するオリフィスと、
が設けられている、コンプライアンスユニット。
【請求項3】
請求項2に記載のコンプライアンスユニットであって、
前記第1流路は、前記ベース部材の外面に開口したポートに連通し、
前記第2流路は、前記第1流路の途中部位から分岐している、コンプライアンスユニット。
【請求項4】
請求項1に記載のコンプライアンスユニットであって、
前記第1流体圧シリンダは、前記第1押圧部が前記テーブル支持部から離れる方向に前記第1押圧部を付勢する第1付勢部材を有し、
前記第2流体圧シリンダは、前記第2押圧部が前記テーブルユニットから離れる方向に前記第2押圧部を付勢する第2付勢部材を有する、コンプライアンスユニット。
【請求項5】
請求項4に記載のコンプライアンスユニットであって、
前記第1流体圧シリンダおよび前記第2流体圧シリンダにシリンダ駆動用の流体が供給されていない初期状態で、前記第2付勢部材が前記第2押圧部に与える荷重は、前記第1付勢部材が前記第1押圧部に与える荷重よりも大きい、コンプライアンスユニット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、コンプライアンスユニットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
例えば、特許文献1には、ベース部材と、テーブル支持部と、コンプライアンス機構と、テーブルユニットとを備えたコンプライアンスユニットが開示されている。テーブル支持部は、ベース部材に対してX方向およびY方向に移動可能である。コンプライアンス機構は、ベース部材およびテーブル支持部に対してX方向およびY方向に移動可能なようにベース部材とテーブル支持部との間に介在されている。テーブルユニットは、テーブル支持部に対して傾動可能に設けられている。
【先行技術文献】
【特許文献】
【0003】
特開2002-172582号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
より良好なコンプライアンスユニットを提供することが望まれている。
【0005】
本発明は、上述した課題を解決することを目的とする。
【課題を解決するための手段】
【0006】
本開示の態様は、ベース部材と、X方向に直交する方向をY方向としたXY平面に沿って前記ベース部材に対して移動可能に配置されたテーブル支持部と、前記ベース部材および前記テーブル支持部に対して前記X方向および前記Y方向に移動可能なように前記ベース部材と前記テーブル支持部の間に介在されたコンプライアンス機構と、前記X方向または前記Y方向に沿って延在した仮想線を中心に傾動可能に前記テーブル支持部に設けられたテーブルユニットと、を備え、前記ベース部材には、前記テーブル支持部に向かって第1押圧部を押し付けることにより前記テーブル支持部を前記ベース部材に対する原点位置に復帰させる第1流体圧シリンダと、前記第1流体圧シリンダによって前記テーブル支持部を前記ベース部材に対する前記原点位置に復帰させた状態で前記テーブルユニットに向かって第2押圧部を押し付けることにより、前記テーブルユニットを、前記テーブルユニットのテーブル板が前記XY平面に対して傾斜した傾斜姿勢から前記テーブル板が前記XY平面に沿うような原点姿勢に復帰させる第2流体圧シリンダと、が設けられている、コンプライアンスユニットである。
【発明の効果】
【0007】
本発明によれば、より良好なコンプライアンスユニットを提供し得る。
【図面の簡単な説明】
【0008】
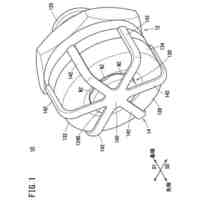
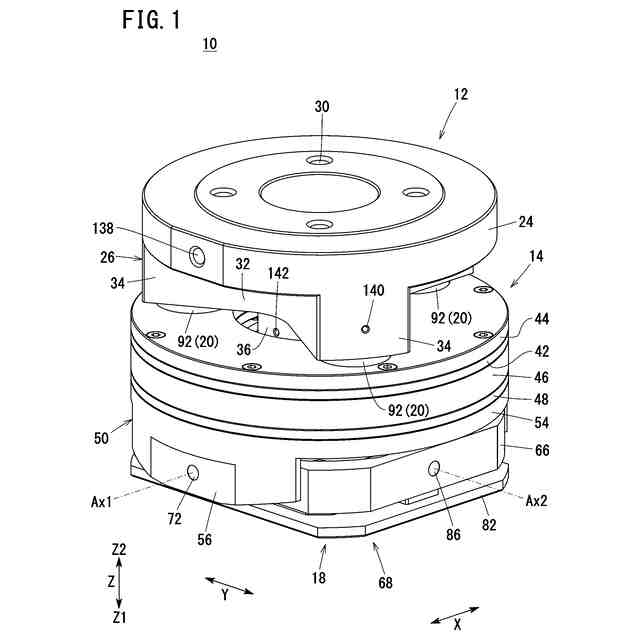
図1は、コンプライアンスユニットの斜視図である。
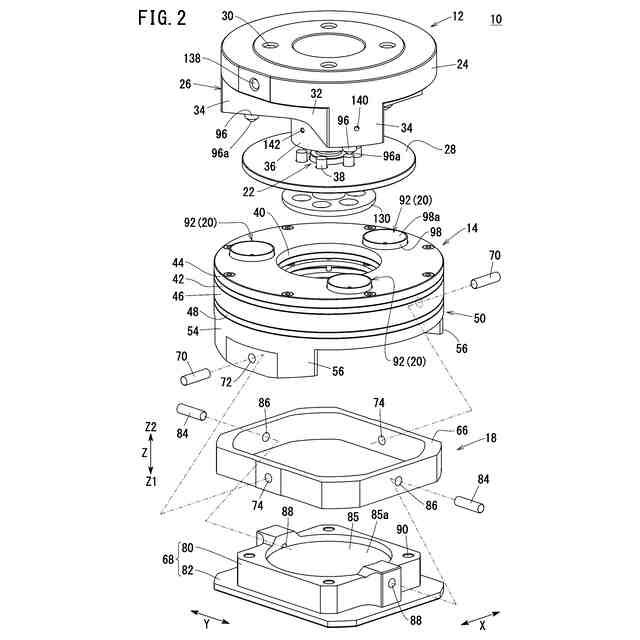
図2は、コンプライアンスユニットの分解斜視図である。
図3は、コンプライアンスユニットの分解斜視図である。
図4は、コンプライアンスユニットの縦断面図である。
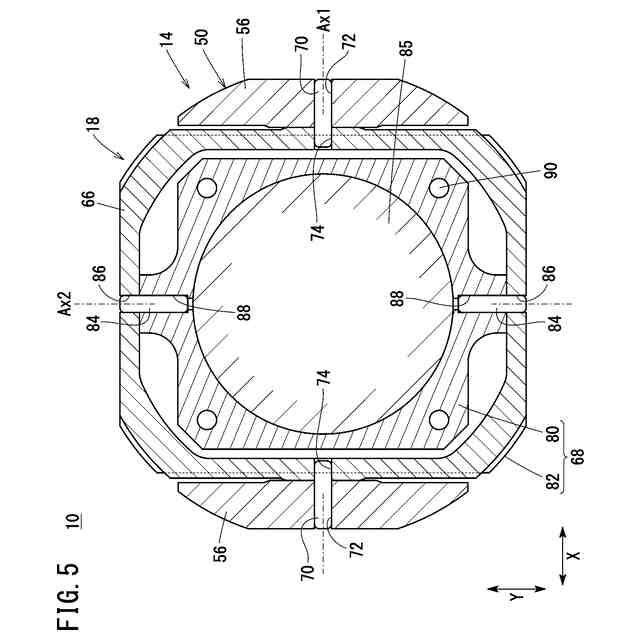
図5は、図4のV-V線に沿った横断面図である。
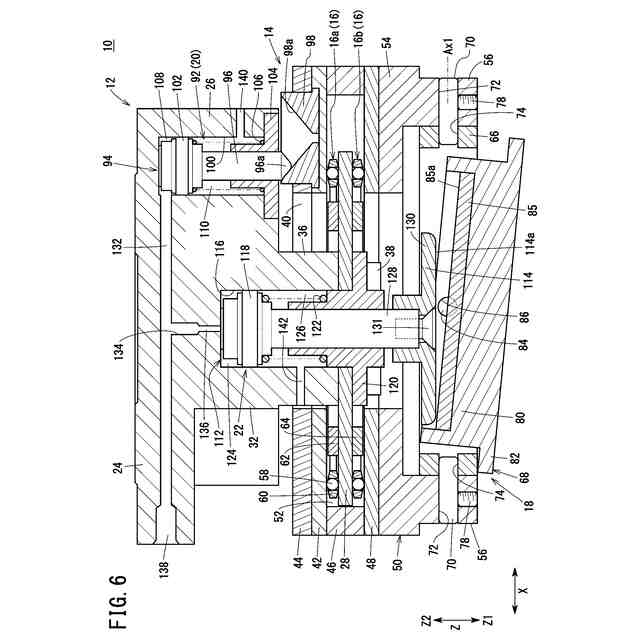
図6は、コンプライアンスユニットの動作説明図である。
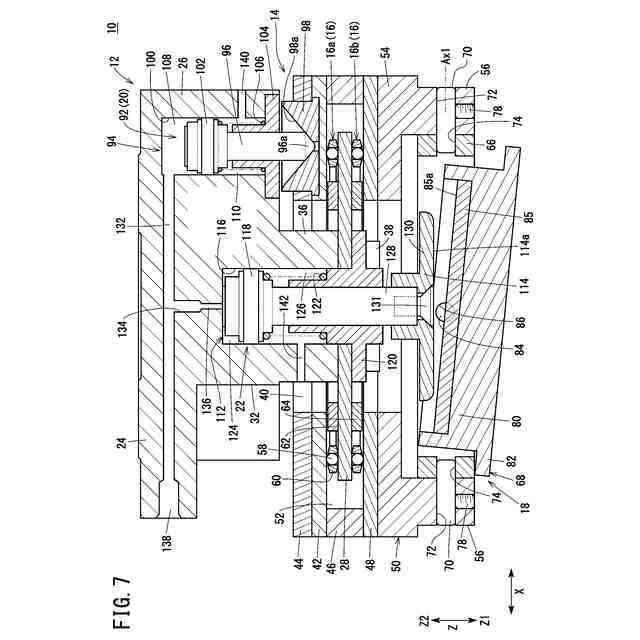
図7は、コンプライアンスユニットの動作説明図である。
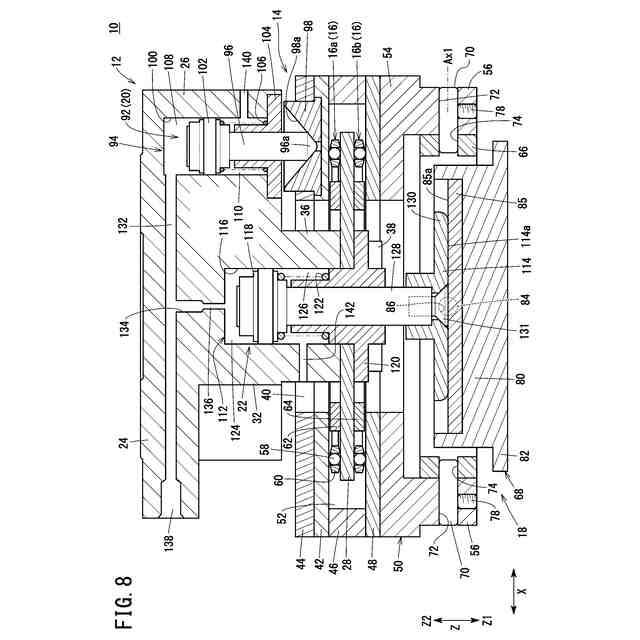
図8は、コンプライアンスユニットの動作説明図である。
【発明を実施するための形態】
【0009】
コンプライアンスユニットにおいて、ベース部材には、第1流体圧シリンダと第2流体圧シリンダが設けられ得る。第1流体圧シリンダは、第1押圧部をテーブル支持部に向かって押し付けることにより、テーブル支持部をベース部材に対して原点位置に復帰させる。第2流体圧シリンダは、第2押圧部をテーブルユニットに向かって押し付けることにより、テーブルユニットを傾斜姿勢から原点姿勢に復帰させ得る。
【0010】
このようなコンプライアンスユニットでは、テーブルユニットがテーブル支持部に設けられている。そのため、テーブル支持部がベース部材に対して原点位置からずれた状態で、第2流体圧シリンダによって第2押圧部をテーブルユニットに対して押し付けると、テーブル支持部をベース部材に対して原点位置に復帰させることができなくなるおそれがある。本開示では、テーブル支持部をベース部材に対して原点位置に確実に復帰させることができることを課題とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
SMC株式会社
位置検出センサ
1か月前
SMC株式会社
ベルヌーイグリッパ
27日前
SMC株式会社
コンプライアンスユニット
1か月前
SMC株式会社
吸着パッド用マグネットダンパ
12日前
十川産業株式会社
積層樹脂チューブ
25日前
株式会社ザイテック
吸着装置
1か月前
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
2か月前
株式会社ジャノメ
ロボット
27日前
株式会社ダイヘン
移動体
2か月前
住友重機械工業株式会社
教示装置
24日前
個人
ペグハンマおよびペグハンマ用部品
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
25日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
24日前
工機ホールディングス株式会社
作業機
24日前
株式会社スター精機
吸着パッド
2か月前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
株式会社マキタ
電気機器
25日前
アピュアン株式会社
衝撃工具
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
ホシデン株式会社
分解用治具
1か月前
株式会社スター精機
産業用ロボット
1か月前
株式会社リコー
多関節ロボット
2か月前
株式会社不二越
協働ロボットシステム
2日前
川崎重工業株式会社
ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
27日前
工機ホールディングス株式会社
作業機
27日前
工機ホールディングス株式会社
作業機
27日前
工機ホールディングス株式会社
作業機
27日前
株式会社リコー
多関節ロボット
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ