TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025093194
公報種別
公開特許公報(A)
公開日
2025-06-23
出願番号
2023208783
出願日
2023-12-11
発明の名称
アクチュエータ取付構造及びロボットハンド
出願人
株式会社ブリヂストン
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
15/12 20060101AFI20250616BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】本開示は、流体圧アクチュエータを有するロボットハンドについて、各流体圧アクチュエータ同士が変形する時期を揃えやすいロボットハンドの提供を目的とする。
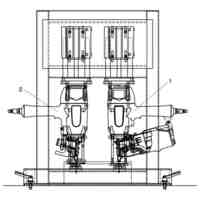
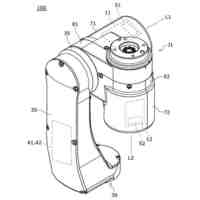
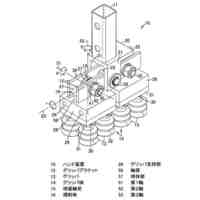
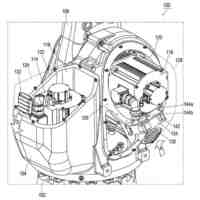
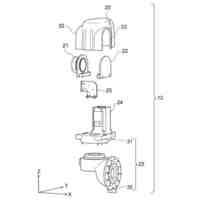
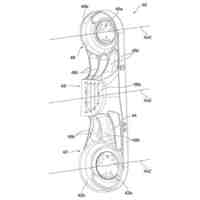
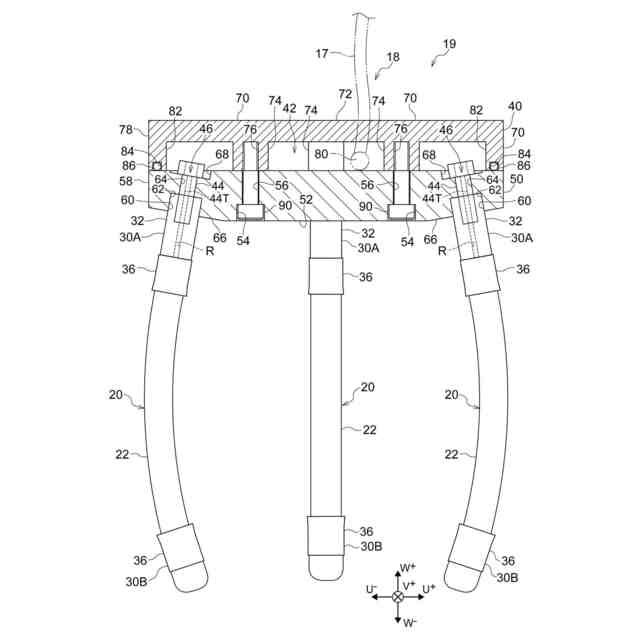
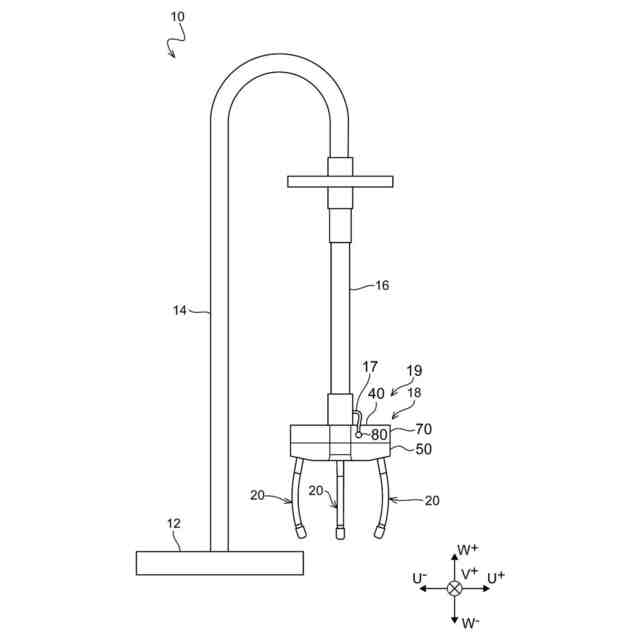
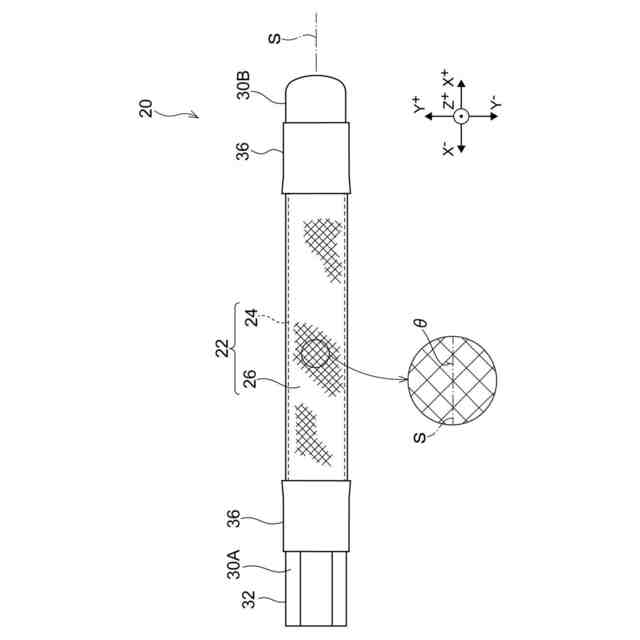
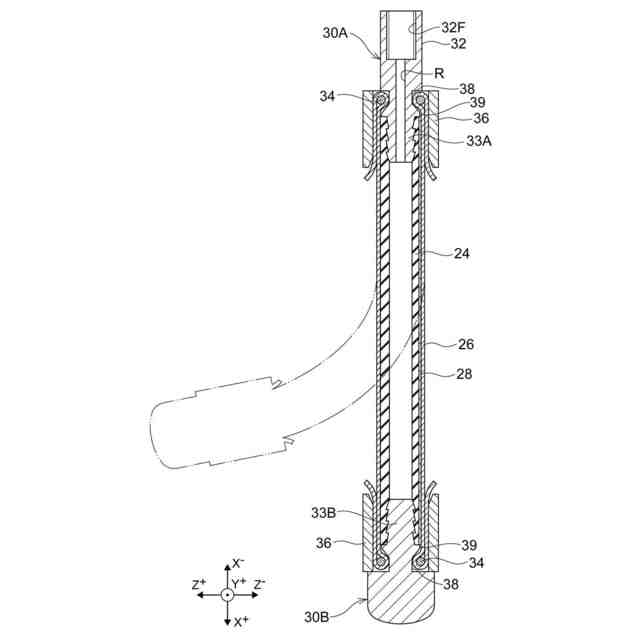
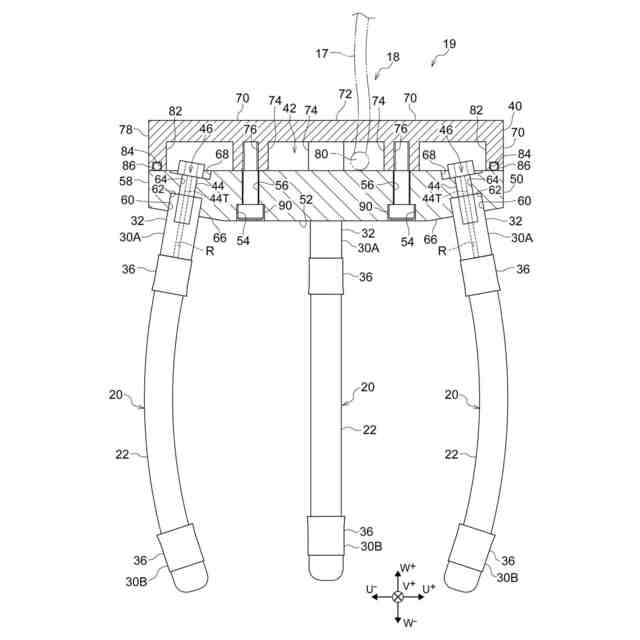
【解決手段】アクチュエータ取付構造19は、内部に供給される流体の圧力によって湾曲変形するアクチュエータ本体部22と、アクチュエータ本体部22の長手方向の片端からアクチュエータ本体部22の内部へ流体を供給する流路Rが形成された取付部32とを有する、複数の流体圧アクチュエータ20と、流体が供給される空間を内部に有すると共に、流体圧アクチュエータ20の取付部32に対応する被取付部60を外面に複数有し、被取付部60に取付部32が取り付けられることで流路Rが空間と接続される筐体40と、を備える。
【選択図】図9
特許請求の範囲
【請求項1】
内部に供給される流体の圧力によって湾曲変形する本体部と、前記本体部の長手方向の片端から前記本体部の内部へ流体を供給する第一流路が形成された取付部とを有する、複数の流体圧アクチュエータと、
流体が供給される空間を内部に有すると共に、前記流体圧アクチュエータの前記取付部に対応する被取付部を外面に複数有し、前記被取付部に前記取付部が取り付けられることで前記第一流路が前記空間と接続される筐体と、
を備えた、アクチュエータ取付構造。
続きを表示(約 530 文字)
【請求項2】
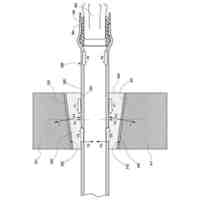
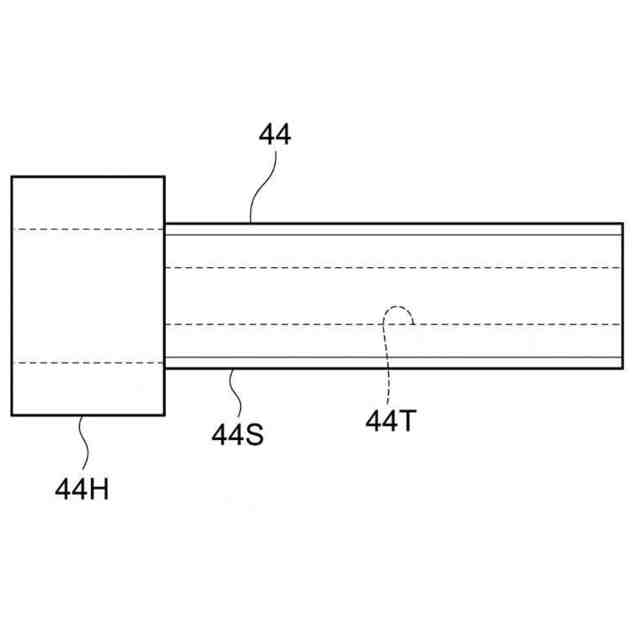
前記流体圧アクチュエータは、前記第一流路と前記空間とを接続する第二流路が形成された取付具によって、前記取付部が前記被取付部に固定される、
請求項1に記載の、アクチュエータ取付構造。
【請求項3】
前記複数の被取付部は、前記空間の中央からいずれも等距離にある、
請求項1に記載の、アクチュエータ取付構造。
【請求項4】
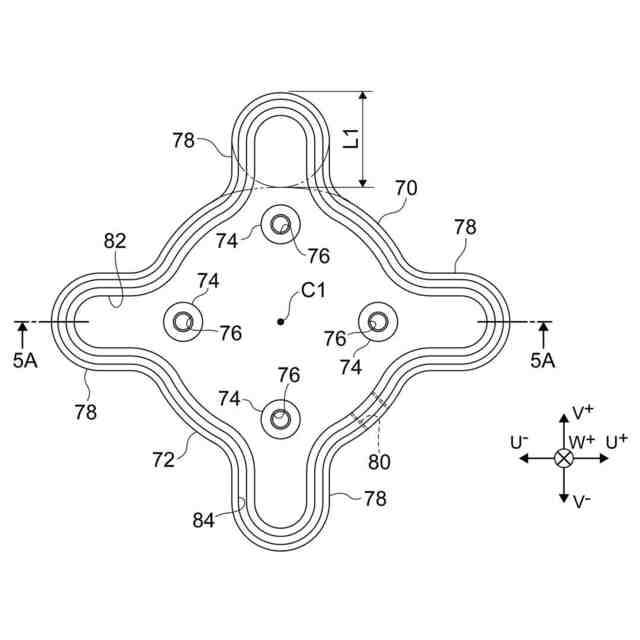
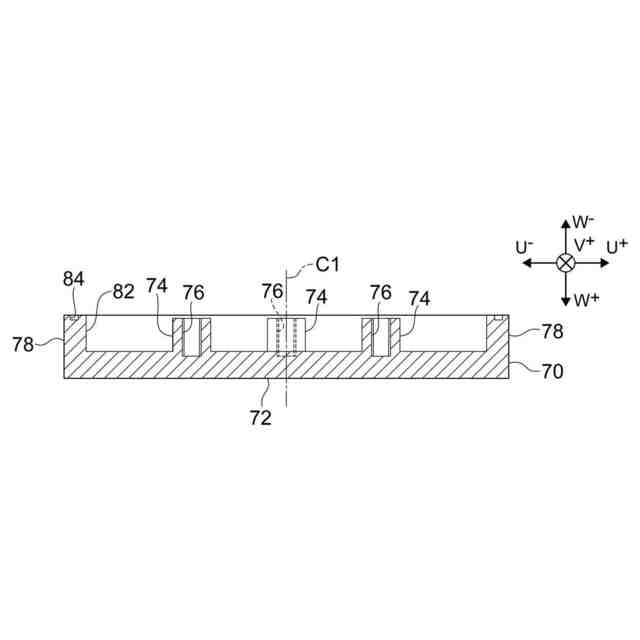
前記筐体は、中央部と、前記中央部から放射状に突出する複数の突出部とを有し、
前記被取付部は、前記突出部にそれぞれ形成されている、
請求項3に記載の、アクチュエータ取付構造。
【請求項5】
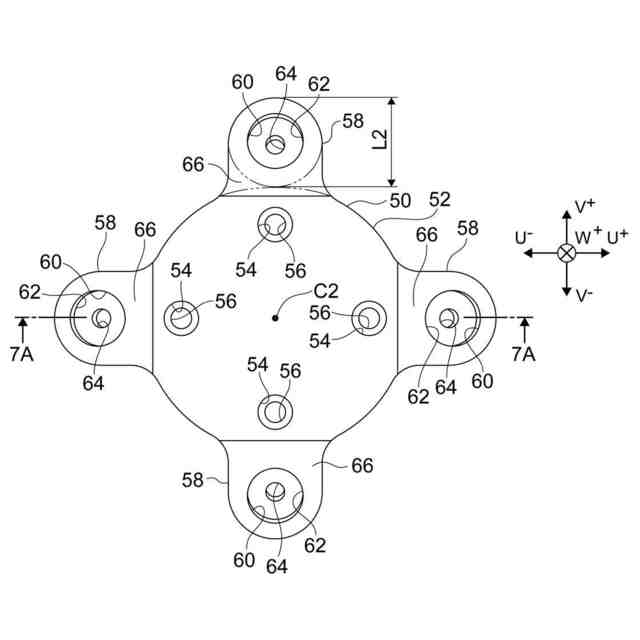
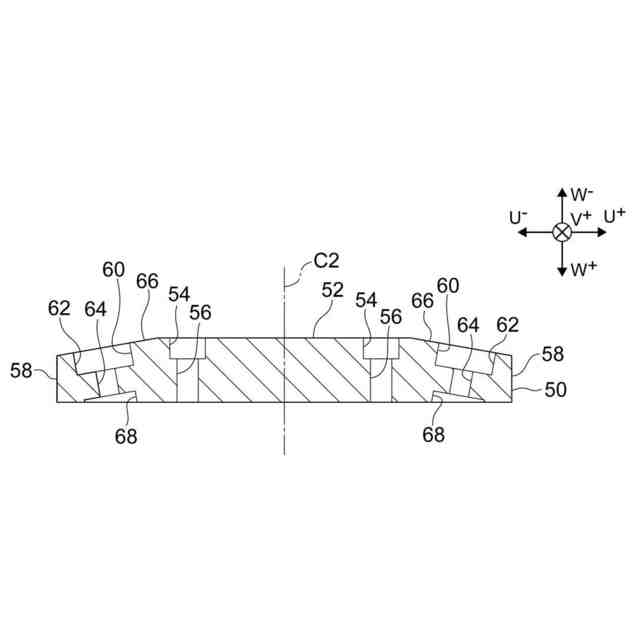
前記複数の前記流体圧アクチュエータにおけるそれぞれの前記片端と反対側の自由端は、互いに向き合って配置され、
前記被取付部のそれぞれは、互いに前記自由端側へ向かって離れるように傾いている、
請求項4に記載の、アクチュエータ取付構造。
【請求項6】
請求項1から請求項5のいずれか一項に記載のアクチュエータ取付構造と、
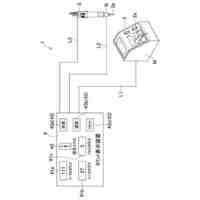
前記流体圧アクチュエータの前記空間に流体を供給する供給部と、
を備える、ロボットハンド。
発明の詳細な説明
【技術分野】
【0001】
本開示は、アクチュエータ取付構造及びロボットハンドに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、軸方向に直交する方向に可変な流体圧アクチュエータと、前記流体圧アクチュエータを取り付ける、取り付け基部と、を備え、前記流体の圧力を付与しない状態において、前記流体圧アクチュエータは、前記取り付け基部にて、前記流体圧アクチュエータの湾曲方向外側に傾斜させて固定されているロボットハンドが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-131052号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の構成では、ロボットハンドに取り付けられていた流体圧アクチュエータが変形する時期がそれぞれの流体圧アクチュエータ間でずれる可能性があった。
【0005】
本開示は、複数の流体圧アクチュエータ同士が変形する時期を揃えやすいアクチュエータ取付構造及びロボットハンドの提供を目的とする。
【課題を解決するための手段】
【0006】
第一態様のアクチュエータ取付構造は、内部に供給される流体の圧力によって湾曲変形する本体部と、前記本体部の長手方向の片端から前記本体部の内部へ流体を供給する第一流路が形成された取付部とを有する、複数の流体圧アクチュエータと、流体が供給される空間を内部に有すると共に、前記流体圧アクチュエータの前記取付部に対応する被取付部を外面に複数有し、前記被取付部に前記取付部が取り付けられることで前記第一流路が前記空間と接続される筐体と、を備える。
【0007】
この態様のアクチュエータ取付構造は、流体圧アクチュエータの取付部が被取付部に取り付けられることにより、第一流路と流体を供給する空間が接続される。また、筐体の外面には、複数の流体圧アクチュエータが取り付けられる被取付部がある。これにより、この態様のアクチュエータ取付構造によれば、複数の流体圧アクチュエータに流体が空間で分配されて供給されるため、複数の流体圧アクチュエータが変形する時期が揃いやすくなる。
【0008】
第二態様のアクチュエータ取付構造は、第一態様に記載のアクチュエータ取付構造において、前記流体圧アクチュエータは、前記第一流路と前記空間とを接続する第二流路が形成された取付具によって、前記取付部が前記被取付部に固定される。
【0009】
この態様のアクチュエータ取付構造は、第二流路が形成された取付具が用いられるため、取付具を用いて取付部が被取付部に取り付けられた状態では、第一流路と空間が第二流路を介して接続される。これにより、この態様のアクチュエータ取付構造によれば、取付具以外の部品によって第一流路と空間を接続する場合と比べて、部品の種類が削減される。
【0010】
第三態様のアクチュエータ取付構造は、第一態様又は第二態様に記載のアクチュエータ取付構造において、前記複数の被取付部は、前記空間の中央からいずれも等距離にある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ブリヂストン
弾性組成物
5日前
株式会社ブリヂストン
ガス漏れ検知用組成物
5日前
株式会社ザイテック
吸着装置
5日前
日東精工株式会社
電動ドライバ
29日前
トヨタ自動車株式会社
関節機構
1か月前
株式会社不二越
ロボット
2か月前
株式会社ダイヘン
移動体
1か月前
東京都公立大学法人
対象物把持装置
1か月前
工機ホールディングス株式会社
作業機
20日前
学校法人五島育英会
アーム機構
1か月前
株式会社スター精機
吸着パッド
28日前
株式会社スター精機
吸着パッド
28日前
工機ホールディングス株式会社
作業機
20日前
工機ホールディングス株式会社
作業機
20日前
株式会社イノウ
給油口キャップ用開閉具
2か月前
庄内機械株式会社
釘打装置
1か月前
株式会社アイエイアイ
グリッパー
1か月前
住友重機械工業株式会社
ロボット
1か月前
株式会社PILLAR
チューブ保持治具
1か月前
川崎重工業株式会社
制動システム
2か月前
株式会社スター精機
産業用ロボット
26日前
オークラ輸送機株式会社
ハンド装置
1か月前
オークラ輸送機株式会社
ハンド装置
13日前
株式会社不二越
垂直多関節ロボット
2か月前
株式会社マキタ
電動作業機
1か月前
芝浦機械株式会社
双腕ロボット
1か月前
株式会社リコー
多関節ロボット
1か月前
川崎重工業株式会社
ロボットシステム
14日前
株式会社マキタ
電動作業機
1か月前
トヨタ自動車東日本株式会社
搬送治具
1か月前
アイホン株式会社
ネジ締めカウントシステム
2か月前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
株式会社ジャノメ
ロボット
22日前
株式会社安川電機
ロボット
26日前
株式会社安川電機
ロボット
26日前
株式会社安川電機
ロボット
26日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ