TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025095885
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023212268
出願日
2023-12-15
発明の名称
環境地図の更新方法、移動装置、管理サーバ、及び移動システム
出願人
村田機械株式会社
代理人
弁理士法人新樹グローバル・アイピー
主分類
G05D
1/246 20240101AFI20250619BHJP(制御;調整)
要約
【課題】環境地図を長期間の運用に適するように更新する。
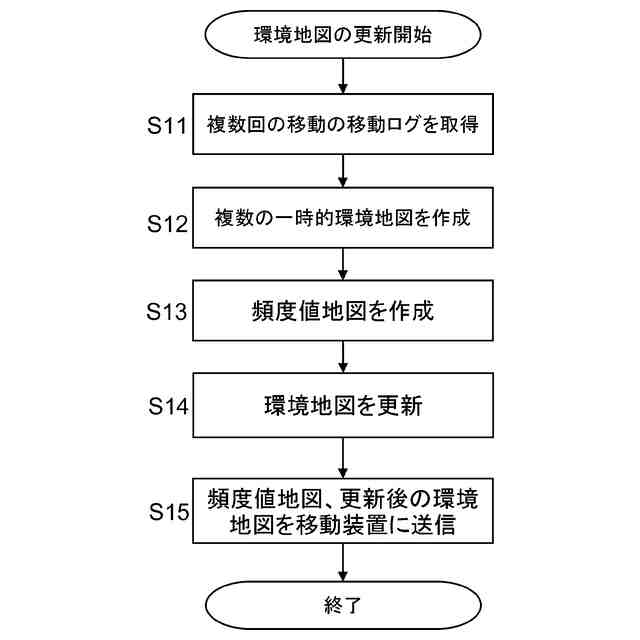
【解決手段】環境地図M1の更新方法は、移動装置1に移動環境MEを移動させるステップと、移動の開始から終了までの複数の通過点のそれぞれについて、移動装置1の周囲における物体の有無を表すローカルマップM2を作成するステップと、移動の開始から終了までに作成された複数のローカルマップM2を用いて、この移動時の領域を表す一時的環境地図を作成するステップと、移動装置1に移動環境MEを複数回移動させて、複数の一時的環境地図を取得するステップと、取得した複数の一時的環境地図に基づいて、移動環境MEに含まれる複数の位置のそれぞれについて、複数回の移動において当該位置に物体が存在していた頻度を表す頻度値を割り当てて頻度値地図M3を作成するステップと、頻度値地図M3に基づいて、環境地図M1を更新するステップと、を備える。
【選択図】図8
特許請求の範囲
【請求項1】
所定の領域を移動する移動装置の前記領域における位置を推定する際に用いられ前記領域を表す環境地図を更新する方法であって、
前記移動装置に前記領域を移動させるステップと、
移動の開始から終了までの複数の通過点のそれぞれについて、前記移動装置の周囲における物体の有無を表す局所地図を作成するステップと、
移動の開始から終了までに作成された複数の局所地図を用いて、この移動時の前記領域を表す一時的環境地図を作成するステップと、
前記移動装置に前記領域を複数回移動させて、複数の一時的環境地図を取得するステップと、
取得した複数の一時的環境地図に基づいて、前記領域内に含まれる複数の位置のそれぞれについて、複数回の移動において当該位置に物体が存在していた頻度を表す頻度値を割り当てて頻度値地図を作成するステップと、
前記頻度値地図に基づいて、前記環境地図を更新するステップと、
を備える、環境地図の更新方法。
続きを表示(約 2,300 文字)
【請求項2】
前記環境地図には、前記領域内に含まれる複数の位置のそれぞれに対して、当該位置における物体の配置の変動度合を表す変動度合値が割り当てられており、
前記環境地図を更新するステップは、前記環境地図の前記変動度合値と、前記頻度値地図の前記頻度値と、の比較に基づいて、前記環境地図を更新するステップを含む、請求項1に記載の環境地図の更新方法。
【請求項3】
前記環境地図を更新するステップは、前記環境地図の各位置に割り当てられた変動度合値を、当該各位置に対応する前記頻度値地図の位置に割り当てられた頻度値に応じて増減することで、前記環境地図を更新するステップを含む、請求項2に記載の環境地図の更新方法。
【請求項4】
前記変動度合値は、前記環境地図を表示する際の輝度である、請求項3に記載の環境地図の更新方法。
【請求項5】
更新された環境地図と、前記頻度値地図と、前記移動装置の移動量と、に基づいて、前記領域における前記移動装置の位置を推定するステップをさらに備える、請求項1~4のいずれかに記載の環境地図の更新方法。
【請求項6】
前記局所地図を作成するステップは、
前記移動の開始から終了までの複数の通過点のそれぞれにおいて、前記移動装置の周囲に存在する物体を検出することで、前記局所地図を作成するための地図作成用データを取得するステップと、
前記移動の開始から終了までに取得された複数の地図作成用データを用いて、前記移動の開始から終了までの複数の局所地図を作成するステップと、
を有する、請求項1~5のいずれかに記載の環境地図の更新方法。
【請求項7】
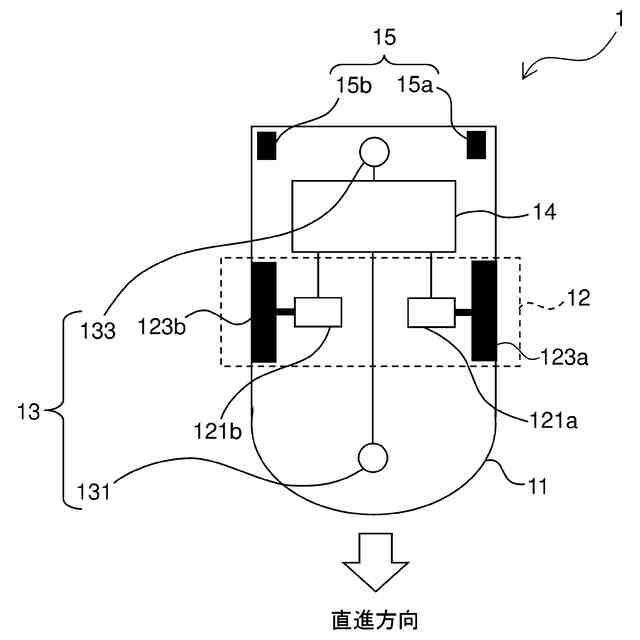
所定の領域を移動する移動装置であって、
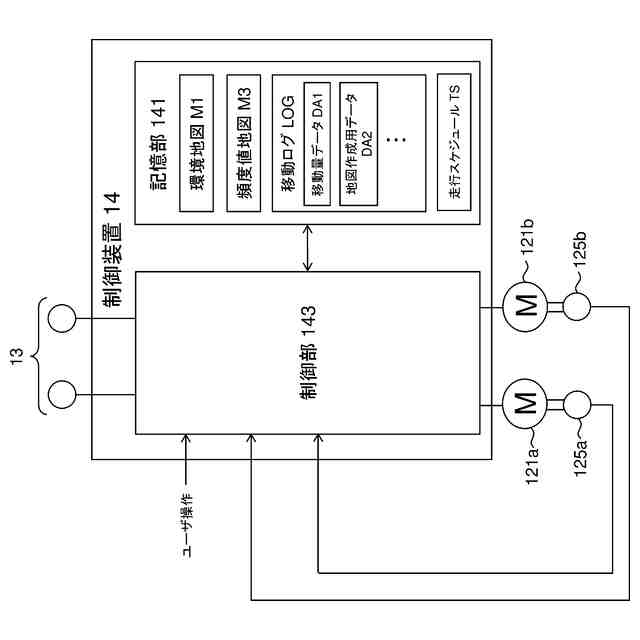
前記移動装置を移動させる移動部と、
前記領域を表す環境地図を用いて前記移動装置の位置を推定し、推定された位置に基づいて前記移動部を制御する制御部と、
を備え、
前記制御部は、
前記移動装置に前記領域を移動させ、
この移動の開始から終了までの複数の通過点のそれぞれについて、前記移動装置の周囲における物体の有無を表す局所地図を作成し、
この移動の開始から終了までに作成された複数の局所地図を用いて、この移動時の前記領域を表す一時的環境地図を作成し、
前記移動装置に前記領域を複数回移動させて、複数の一時的環境地図を取得し、
取得した複数の一時的環境地図に基づいて、前記領域内に含まれる複数の位置のそれぞれについて、複数回の移動において当該位置に物体が存在していた頻度を表す頻度値を割り当てて頻度値地図を作成し、
前記頻度値地図に基づいて、前記環境地図を更新する、
移動装置。
【請求項8】
所定の領域を移動し、前記領域を表す環境地図を用いて自己位置を推定する移動装置を管理する管理サーバであって、
前記移動装置は、前記領域を移動する際に、この移動の開始から終了までの複数の通過点のそれぞれにおいて、前記移動装置の周囲に存在する物体を検出することで、前記移動装置の周囲における物体の有無を表す局所地図を作成するための地図作成用データを取得し、
この移動の開始から終了までに取得した複数の地図作成用データを、前記管理サーバに送信し、
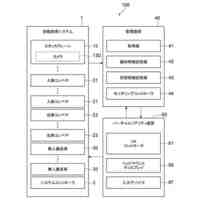
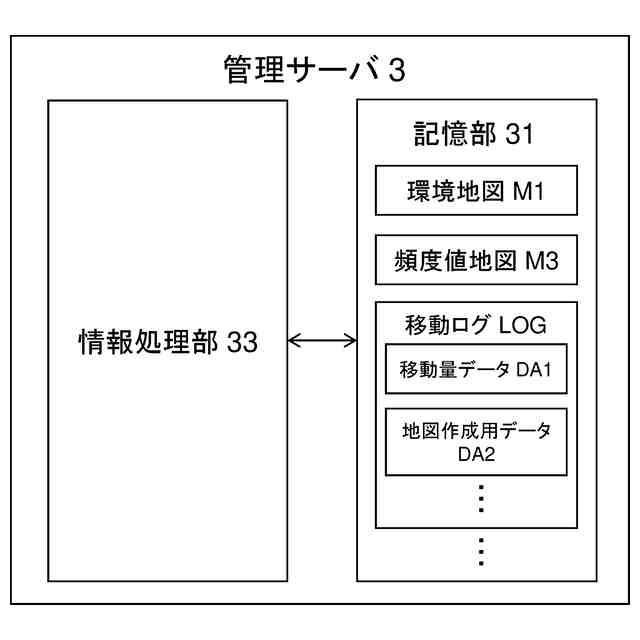
前記管理サーバは、情報処理部を備え、
前記情報処理部は、
前記移動装置から受信した複数の地図作成用データを用いて、当該地図作成用データを取得したときの移動の開始から終了までの複数の通過点のそれぞれについて、前記局所地図を作成し、
この移動の開始から終了までに作成された複数の局所地図を用いて、この移動時の前記領域を表す一時的環境地図を作成し、
前記移動装置の複数回の移動により得られた複数の一時的環境地図に基づいて、前記領域内に含まれる複数の位置のそれぞれについて、複数回の移動において当該位置に物体が存在していた頻度を表す頻度値を割り当てて頻度値地図を作成し、
前記頻度値地図に基づいて、前記環境地図を更新する、
管理サーバ。
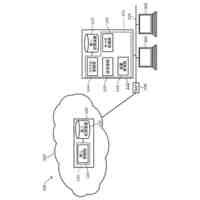
【請求項9】
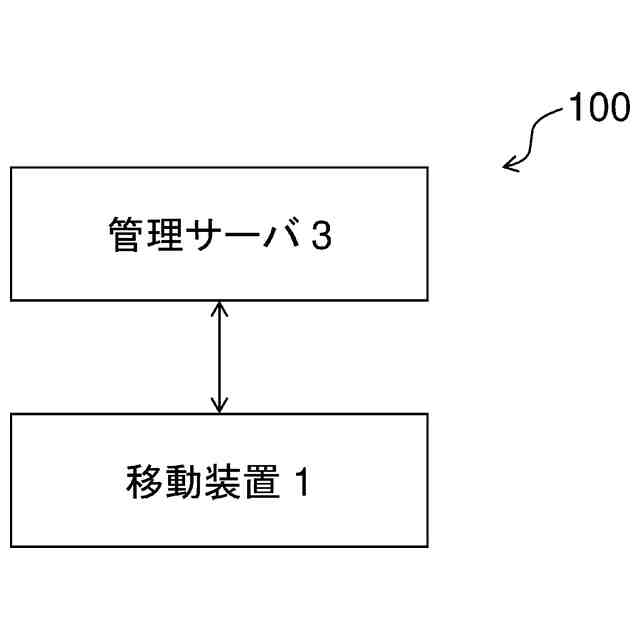
所定の領域を移動し、前記領域を表す環境地図を用いて自己位置を推定する移動装置と、
前記移動装置を管理する管理サーバと、を備え、
前記移動装置は、
前記領域を移動する際に、この移動の開始から終了までの複数の通過点のそれぞれにおいて、前記移動装置の周囲に存在する物体を検出することで、前記移動装置の周囲における物体の有無を表す局所地図を作成するための地図作成用データを取得し、
この移動の開始から終了までに取得した複数の地図作成用データを、前記管理サーバに送信し、
前記管理サーバは、
前記移動装置から受信した複数の地図作成用データを用いて、当該地図作成用データを取得したときの移動の開始から終了までの複数の通過点のそれぞれについて、前記局所地図を作成し、
この移動の開始から終了までに作成された複数の局所地図を用いて、この移動時の前記領域を表す一時的環境地図を作成し、
前記移動装置の複数回の移動により得られた複数の一時的環境地図に基づいて、前記領域内に含まれる複数の位置のそれぞれについて、複数回の移動において当該位置に物体が存在していた頻度を表す頻度値を割り当てて頻度値地図を作成し、
前記頻度値地図に基づいて、前記環境地図を更新する、
移動システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、所定の領域を移動する移動装置に関する。特に、移動装置が所定の領域を移動中に移動装置の位置を推定するときに用いられる環境地図の更新方法、移動装置、移動装置を管理する管理サーバ、及び、移動装置と管理サーバとを備える移動システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、所定の領域を自律的に移動する移動装置が知られている。この移動装置は、所定の領域における移動装置の位置(自己位置とも呼ばれる)を推定し、推定された自己位置に基づいて移動装置の移動を制御することで、所定の領域を自律移動できる。移動装置は、自律移動している所定の領域における物体の配置を示す環境地図と、移動装置の周囲の物体の配置を示す局所地図と、の比較に基づいて自己位置を推定する。具体的には、環境地図に局所地図を配置したときに、局所地図と環境地図とが一致した位置を自己位置と推定する。
【0003】
自己位置推定では、移動装置が移動する領域を環境地図が適切に表せているか否かが、自己位置の推定の精度に影響する。そのため、環境地図を作成後に移動装置が移動する領域において物体の配置が変更されたにも関わらず、環境地図を更新しないまま自己位置を推定すると、自己位置を正しく推定できなくなる。
【0004】
このため、自己位置の推定に用いる環境地図を更新することが行われている。例えば、移動装置がある位置において所定の回数以上物体を検出した場合にのみ、当該位置に物体を追加するとの環境地図の更新方法が知られている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0005】
特開2005-010907号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記のような従来の更新方法は、長期間の物体の配置状態を反映させた環境地図の更新を行うことができなかった。この結果、長期間の運用に適した環境地図の更新を実現できなかった。
【0007】
本発明の目的は、移動装置の自己位置の推定に用いられる環境地図を、長期間の運用に適するように更新することにある。
【課題を解決するための手段】
【0008】
以下に、課題を解決するための手段として複数の態様を説明する。これら態様は、必要に応じて任意に組み合せることができる。
本発明の一態様に係る方法は、所定の領域を移動する移動装置の当該領域における位置を推定する際に用いられ、当該領域を表す環境地図を更新する方法である。環境地図の更新方法は、以下のステップを備える。
◎移動装置に所定の領域を移動させるステップ。
◎移動の開始から終了までの複数の通過点のそれぞれについて、移動装置の周囲における物体の有無を表す局所地図を作成するステップ。
◎移動の開始から終了までに作成された複数の局所地図を用いて、この移動時の領域を表す一時的環境地図を作成するステップ。
◎移動装置に所定の領域を複数回移動させて、複数の一時的環境地図を取得するステップ。
◎取得した複数の一時的環境地図に基づいて、所定の領域内に含まれる複数の位置のそれぞれについて、複数回の移動において当該位置に物体が存在していた頻度を表す頻度値を割り当てて頻度値地図を作成するステップ。
◎頻度値地図に基づいて、環境地図を更新するステップ。
【0009】
上記の環境地図の更新方法では、移動装置に所定の領域を複数回移動させたときに、この複数回の移動のうち所定の領域に含まれる各位置に物体が存在していた頻度を表す頻度値を計数し、計数した頻度値を所定の領域の各位置に割り当てて頻度値地図を作成し、この頻度値地図に基づいて環境地図を更新している。
【0010】
上記の頻度値地図に基づいて環境地図を更新することで、長期間における所定の領域内の物体の配置の変動頻度を考慮して、環境地図を更新できる。長期間の物体の配置の変動を考慮して更新された環境地図は、長期間の運用に適している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
村田機械株式会社
糸巻取機
24日前
村田機械株式会社
糸巻取機
9日前
村田機械株式会社
ピッキングシステム
8日前
村田機械株式会社
サポート支援システム
1か月前
村田機械株式会社
糸巻取装置及び自動ワインダ
8日前
村田機械株式会社
空気紡績機及び吸引捕捉装置
9日前
村田機械株式会社
ストレージシステム、および第一記憶システム
4日前
村田機械株式会社
ストレージシステム、および第一記憶システム
4日前
村田機械株式会社
内径計測システム及び内径計測方法
1か月前
個人
生産早送り装置
25日前
株式会社豊田自動織機
産業車両
15日前
株式会社FUJI
工作機械
2か月前
株式会社カネカ
製造システム
1日前
株式会社ダイヘン
移動体
2か月前
株式会社FUJI
加工機械ライン
1か月前
愛知製鋼株式会社
車両用システム
9日前
個人
作業車両自動化システム
1か月前
ローム株式会社
半導体集積回路
2か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
ペダル機構
3か月前
トヨタ自動車株式会社
移動制御システム
25日前
株式会社ダイフク
搬送設備
29日前
株式会社ダイフク
搬送設備
3か月前
株式会社ダイフク
搬送設備
5日前
三栄ハイテックス株式会社
基準電圧回路
3か月前
トヨタ自動車株式会社
生産管理システム
1か月前
株式会社鷺宮製作所
制御装置
2か月前
トヨタ自動車株式会社
減圧弁
1か月前
株式会社オプトン
制御プログラム生成装置
2か月前
三菱電機株式会社
自己位置推定装置
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
3か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイヘン
負荷時タップ切換器
2か月前
トヨタ自動車株式会社
クラッチペダル
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ