TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025098692
公報種別
公開特許公報(A)
公開日
2025-07-02
出願番号
2023215010
出願日
2023-12-20
発明の名称
E形止め輪挿入工具およびE形止め輪供給装置
出願人
株式会社モコム
代理人
個人
主分類
B25B
27/20 20060101AFI20250625BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】軸のアキシャル方向から簡便にE形止め輪を挿入できるE形止め輪挿入工具等を提供する。
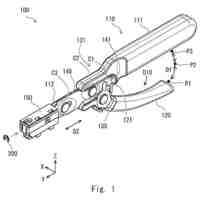
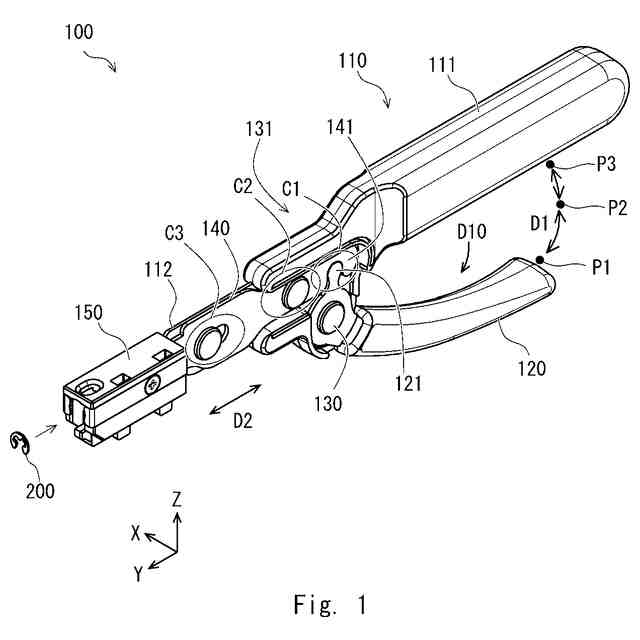
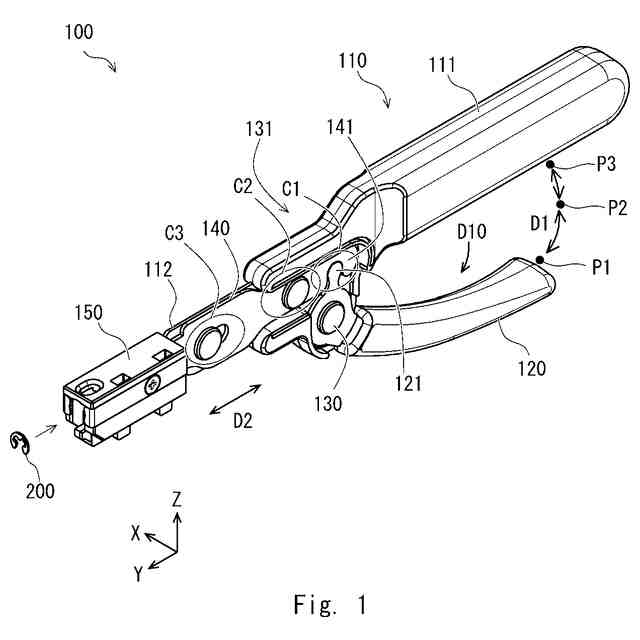
【解決手段】E形止め輪挿入工具100において、本体部110は、一端側にハンドル111を有する。
操作レバー120は、本体部110に設けられた支点に回動可能に係合する。
伝達部140は、操作レバー120の回動方向の動きを、本体部110の延伸方向に沿った直線方向の動きに変換して他端側に伝達する。
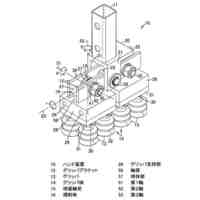
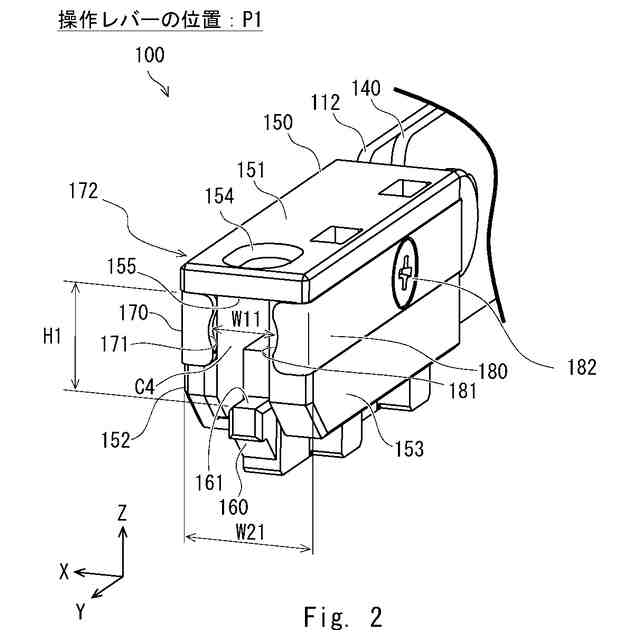
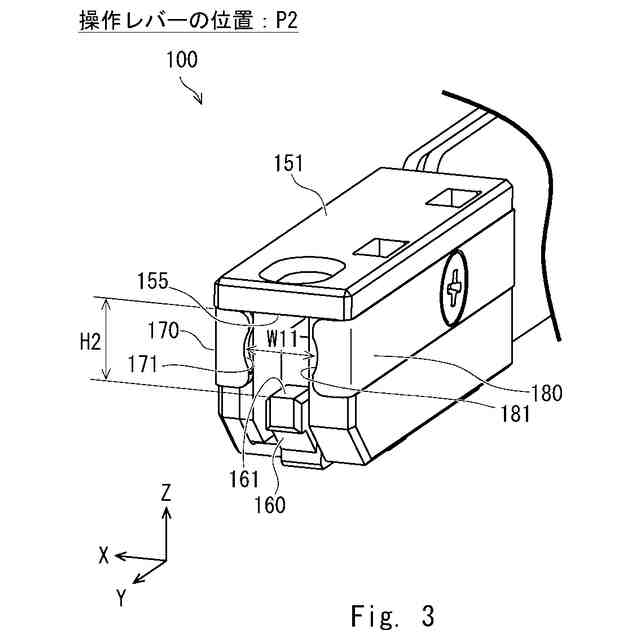
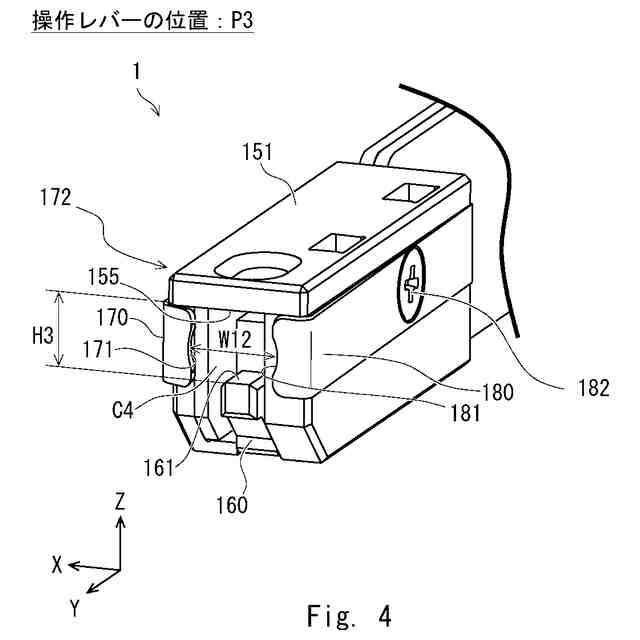
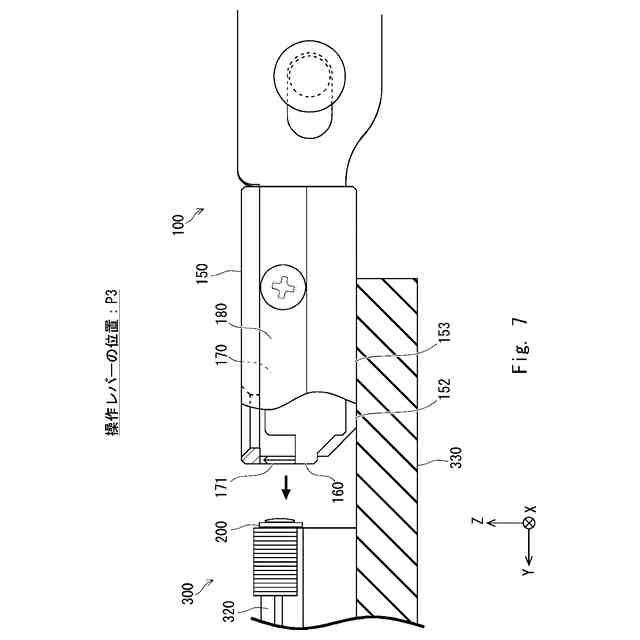
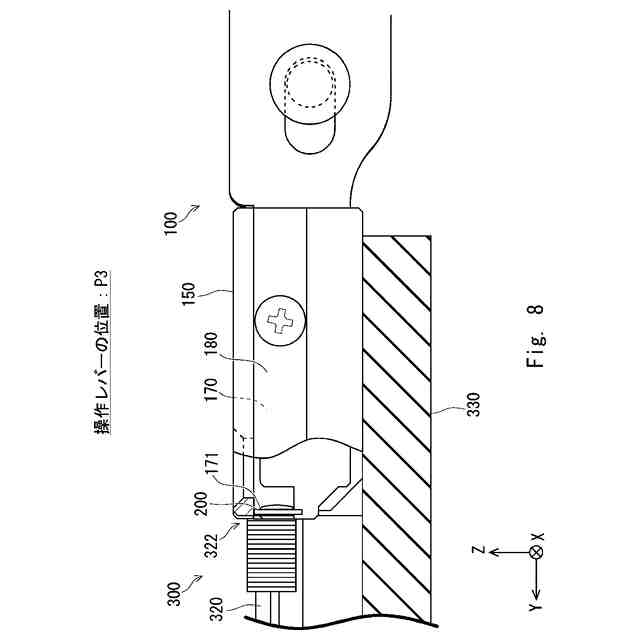
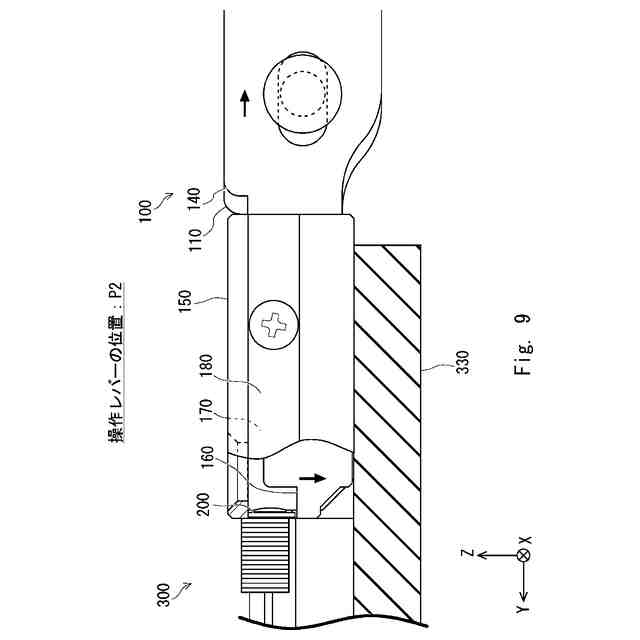
E形止め輪挿入工具100の動作ブロック150において、第1挟持部171および第2挟持部181は、本体部110の他端側において、伝達部140に連動して左右方向に開閉動作することによりE形止め輪を挟持可能である。支持面155は、上下方向においてE形止め輪の端面を支持する。当接部材160は、伝達部140に連動して上下方向に開閉動作することによりE形止め輪に軸を押し当ててE形止め輪を軸に挿入する。
【選択図】図1
特許請求の範囲
【請求項1】
作業対象である軸に対してアキシャル方向からアクセスしてE形止め輪を挿入するE形止め輪挿入工具であって、
一端側にハンドルを有する棒状の部材である本体部と、
前記本体部に設けられた支点に回動可能に係合する操作レバーと、
前記操作レバーに係合することにより前記操作レバーの回動方向の動きを、前記本体部の延伸方向に沿った直線方向の動きに変換して前記本体部の他端側に伝達する伝達部と、
前記他端側において、前記伝達部に連動して前記延伸方向に直行する左右方向に開閉動作することにより前記E形止め輪を挟持可能な第1挟持部および第2挟持部と、上下方向において前記E形止め輪の端面を支持する支持面と、前記伝達部に連動して前記延伸方向と前記左右方向に直行する上下方向に開閉動作することにより前記支持面が支持する前記E形止め輪に前記軸を押し当てて前記E形止め輪を前記軸に挿入する当接部材と、を有する動作ブロックと、を備える
E形止め輪挿入工具。
続きを表示(約 1,500 文字)
【請求項2】
前記動作ブロックは、前記当接部材に対向する位置において前記支持面を有する上部材を有し、
前記上部材は、作業者が前記動作ブロックを前記軸に近づけて前記E形止め輪をセットする場合に前記E形止め輪および前記軸を目視可能に設けられた開口部を有する、
請求項1に記載のE形止め輪挿入工具。
【請求項3】
前記操作レバーは、第1状態、第2状態および第3状態に回動可能であり、
前記第1挟持部と前記第2挟持部とは、前記第1状態から前記第2状態にかけて前記E形止め輪の外径より小さい距離の位置に存在し、前記第3状態において前記E形止め輪の外径より大きい距離の位置に存在しており、
前記当接部材は、前記第1状態において前記第1挟持部と前記第2挟持部とが前記E形止め輪を挟持している場合に前記動作ブロックが前記軸を受入可能な位置に存在し、前記第2状態において前記支持面が前記端面を支持する前記E形止め輪に前記軸を当接させる位置に存在し、前記第2状態から前記第3状態に変化する場合に前記E形止め輪を前記軸に挿入する方向に移動する、
請求項1に記載のE形止め輪挿入工具。
【請求項4】
前記第1挟持部は、弾性部材である第1保持体の先端に設けられており、
前記第2挟持部は、弾性部材である第2保持体の先端に設けられており、
前記第1保持体および前記第2保持体は、前記第1状態および前記第2状態において前記第1保持体および前記第2保持体の弾性力により前記E形止め輪を保持する、
請求項3に記載のE形止め輪挿入工具。
【請求項5】
前記操作レバーが前記ハンドルから遠ざかる方向に前記伝達部または前記操作レバーのいずれかを付勢するレバー付勢部をさらに備え、
前記操作レバーは、前記第1状態における位置よりも前記第2状態における位置の方が前記ハンドルに近づいた状態であり、且つ、前記第2状態における位置よりも前記第3状態における位置の方が前記ハンドルに近づいた状態となるように設定されている、
請求項3に記載のE形止め輪挿入工具。
【請求項6】
前記当接部材は、前記第1状態において前記動作ブロックの外形の下方に突出し、前記第2状態および前記第3状態において前記動作ブロックの外形内に収納されている、
請求項3~5のいずれか一項に記載のE形止め輪挿入工具。
【請求項7】
複数のE形止め輪を第1端部から受け入れて前記第1端部より低い第2端部に前記E形止め輪を導くレール部と、
前記第2端部の下方側において最下部の1つの前記E形止め輪が落下可能な幅を有する止め輪溝部と、
前記止め輪溝部の下方側において前記E形止め輪を受け止めるストッパと、
請求項6に記載のE形止め輪挿入工具の前記動作ブロックを、前記止め輪溝部に落下した前記E形止め輪に導くために、前記動作ブロックの外形に対応した凹形状を有するガイド溝部と、を備える、
E形止め輪供給装置。
【請求項8】
前記ガイド溝部は、前記第3状態の前記E形止め輪挿入工具が前記止め輪溝部に位置する前記E形止め輪を挟持可能に設定されている、
請求項7に記載のE形止め輪供給装置。
【請求項9】
前記ガイド溝部の下部から前記ガイド溝部の外側に突出し、外力による衝撃または振動を受ける受力部を有する片持ち梁状の振動アームをさらに備える、
請求項7に記載のE形止め輪供給装置。
発明の詳細な説明
【技術分野】
【0001】
本発明はE形止め輪挿入工具およびE形止め輪供給装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
E形止め輪を軸に挿入する手段として、様々な工具が開発されている。
【0003】
例えば、特許文献1に記載のE形止め輪挿入工具は、ハンドル材に固定された平板の先端が分岐し、溝を持つ挟持片とスライド板で構成され、軸に対してラジアル方向からE形止め輪を挿入し、当接部が軸に押圧されるとスライド板が動く。
【0004】
また特許文献2に記載のE形止め輪挿入工具は、軸を挟持する軸挟持部を持つ第1挟持片と、E形止め輪を挟持する止め輪挟持部を持つ第2挟持片、及び開閉部材を備え、これらがスライドすることで軸と止め輪とを近づける。
【先行技術文献】
【特許文献】
【0005】
特許第6178532号公報
特許第6469829号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、作業対象の形状またはE形止め輪を挿入する軸の位置により、ラジアル方向からE形止め輪を挿入するのが困難な場合がある。
【0007】
本開示は、このような課題を解決するためになされたものであり、E形止め輪を挿入する一連の作業を安定的に行うことができ、アキシャル方向からアクセスして簡便にE形止め輪を挿入できるE形止め輪挿入工具等を提供することを目的とするものである。
【課題を解決するための手段】
【0008】
本開示にかかるE形止め輪挿入工具は、作業対象である軸に対してアキシャル方向からアクセスしてE形止め輪を挿入する。E形止め輪挿入工具は、本体部と、操作レバーと、伝達部と、動作ブロックと、を有している。本体部は、一端側にハンドルを有する棒状の部材である。操作レバーは、本体部に設けられた支点に回動可能に係合する。伝達部は、操作レバーに係合することにより操作レバーの回動方向の動きを、本体部の延伸方向に沿った直線方向の動きに変換して本体部の他端側に伝達する。動作ブロックは、第1挟持部および第2挟持部と、支持面と、当接部材と、を有する。第1挟持部および第2挟持部は、本体部の他端側において、伝達部に連動して前記延伸方向に直行する左右方向に開閉動作することによりE形止め輪を挟持可能である。支持面は、上下方向においてE形止め輪の端面を支持する。当接部材は、伝達部に連動して前記延伸方向と前記左右方向に直行する上下方向に開閉動作することにより支持面が支持するE形止め輪に軸を押し当ててE形止め輪を軸に挿入する。
【0009】
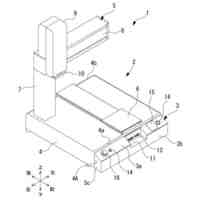
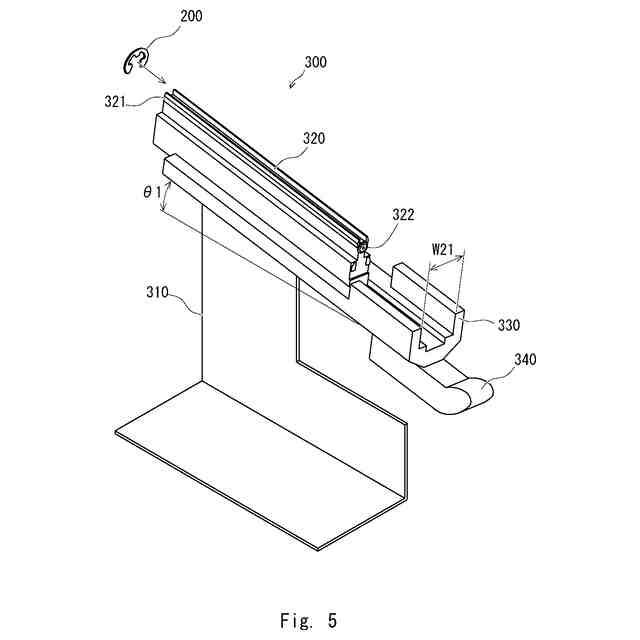
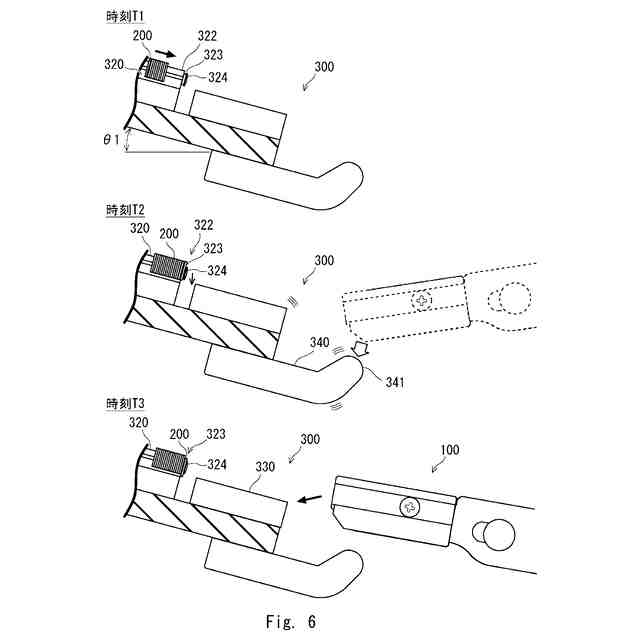
本開示にかかるE形止め輪供給装置は、レール部と、止め輪溝部と、ストッパと、ガイド溝部と、を有している。レール部は、複数のE形止め輪を第1端部から受け入れて第1端部より低い第2端部にE形止め輪を導く。止め輪溝部は、第2端部の下方側において最下部の1つのE形止め輪が落下可能な幅を有する。ストッパは、止め輪溝部の下方側においてE形止め輪を受け止める。ガイド溝部は、請求項6に記載のE形止め輪挿入工具の動作ブロックを、止め輪溝部に落下したE形止め輪に導くために、動作ブロックの外形に対応した凹形状を有する。
【0010】
なお、本開示において「E形止め輪」とは、中空円板状であり開口部を有する金属板であって、円周溝を有する軸に対して、かかる軸のラジアル方向から、金属板の開口部を弾性域内において押し拡げられるようにして挿入される止め輪をいう。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社モコム
E形止め輪挿入工具およびE形止め輪供給装置
5日前
株式会社ザイテック
吸着装置
11日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
今日
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
関節機構
1か月前
個人
ペグハンマおよびペグハンマ用部品
4日前
株式会社ダイヘン
搬送装置
4日前
東京都公立大学法人
対象物把持装置
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
26日前
工機ホールディングス株式会社
作業機
26日前
工機ホールディングス株式会社
作業機
26日前
学校法人五島育英会
アーム機構
1か月前
株式会社スター精機
吸着パッド
1か月前
庄内機械株式会社
釘打装置
1か月前
住友重機械工業株式会社
支援装置
4日前
住友重機械工業株式会社
支援装置
4日前
株式会社PILLAR
チューブ保持治具
1か月前
株式会社スター精機
産業用ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
19日前
アピュアン株式会社
衝撃工具
6日前
オークラ輸送機株式会社
ハンド装置
1か月前
ホシデン株式会社
分解用治具
4日前
工機ホールディングス株式会社
作業機
今日
川崎重工業株式会社
ロボットシステム
20日前
工機ホールディングス株式会社
作業機
今日
株式会社マキタ
電動作業機
1か月前
工機ホールディングス株式会社
作業機
今日
工機ホールディングス株式会社
作業機
今日
トヨタ自動車東日本株式会社
搬送治具
1か月前
株式会社リコー
多関節ロボット
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社リコー
多関節ロボット
4日前
株式会社ジャノメ
ロボット
28日前
株式会社安川電機
ロボット
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ