TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025102343
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023219708
出願日
2023-12-26
発明の名称
外観検査装置および外観検査方法
出願人
株式会社キーエンス
代理人
主分類
G01N
21/88 20060101AFI20250701BHJP(測定;試験)
要約
【課題】 検査対象物の種類や要望する検査内容に応じた設定を行うことが出来る、柔軟な運用が可能な外観検査を実現することを、本開示の目的の1つとしてよい。
【解決手段】
検査対象物が撮像された検査対象画像に含まれる欠陥を、機械学習モデルを用いて検出するプロセッサを備える外観検査装置であって、第1機械学習モデルは、第2機械学習モデルよりも、位置依存性のある欠陥を検出しやすいものであり、第2機械学習モデルは、第1機械学習モデルよりも、位置依存性の無い欠陥を検出しやすいものであり、プロセッサは、検証画像に対する第1機械学習モデルおよび第2機械学習モデルの欠陥検出の精度に基づいて、第1機械学習モデルおよび第2機械学習モデルの使用比率を決定し、使用比率に基づいて、第1機械学習モデルおよび第2機械学習モデルの少なくとも一方を用いて、検査対象画像に含まれる欠陥を検出する。
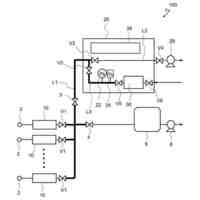
【選択図】 図1
特許請求の範囲
【請求項1】
検査対象物が撮像された検査対象画像に含まれる欠陥を、機械学習モデルを用いて検出するプロセッサを備える外観検査装置であって、
前記機械学習モデルは、第1機械学習モデルと、第2機械学習モデルと、を含み、
前記第1機械学習モデルは、前記第2機械学習モデルよりも、位置依存性のある欠陥を検出しやすいものであり、
前記第2機械学習モデルは、前記第1機械学習モデルよりも、位置依存性の無い欠陥を検出しやすいものであり、
前記プロセッサは、
前記検査対象物が撮像された学習画像を用いて、前記第1機械学習モデルおよび前記第2機械学習モデルを訓練し、
訓練された前記第1機械学習モデルおよび前記第2機械学習モデルを用いて、前記検査対象物が撮像された検証画像に含まれる欠陥を検出し、
前記検証画像に対する前記第1機械学習モデルおよび前記第2機械学習モデルの欠陥検出の精度に基づいて、前記第1機械学習モデルおよび前記第2機械学習モデルの使用比率を決定し、
前記使用比率に基づいて、前記第1機械学習モデルおよび前記第2機械学習モデルの少なくとも一方を用いて、前記検査対象画像に含まれる欠陥を検出する
外観検査装置。
続きを表示(約 2,100 文字)
【請求項2】
前記第1機械学習モデルは、複数のブロックに分けられた画像又は特徴マップのブロックごとに欠陥を検出し、
前記第2機械学習モデルは、前記第1機械学習モデルよりも少ないブロック数で分けられた前記画像又は特徴マップのブロックごとに欠陥を検出する
請求項1に記載された外観検査装置。
【請求項3】
前記第1機械学習モデルおよび前記第2機械学習モデルは、それぞれ前記複数のブロックのブロックごとにパラメータを有し、当該パラメータに基づいてブロックごとに欠陥を検出する
請求項2に記載された外観検査装置。
【請求項4】
前記プロセッサは、
前記第1機械学習モデルを用いて前記検証画像の第1欠陥度を出力し、
前記第2機械学習モデルを用いて前記検証画像の第2欠陥度を出力し、
前記第1機械学習モデルおよび前記第2機械学習モデルの複数の使用比率候補を取得し、
前記複数の使用比率候補の各比率に基づいて、前記第1欠陥度および前記第2欠陥度を合成した合成欠陥度を出力し、
前記合成欠陥度に基づいて、各使用比率候補に対応する前記欠陥検出の精度を評価し、
前記欠陥検出の精度の評価結果に基づいて、前記複数の使用比率候補から前記使用比率を決定する
請求項1に記載された外観検査装置。
【請求項5】
前記プロセッサは、記憶部に予め記憶された前記複数の使用比率候補を取得する、または、ユーザから指定を受け付けることにより前記複数の使用比率候補を取得する
請求項4に記載された外観検査装置。
【請求項6】
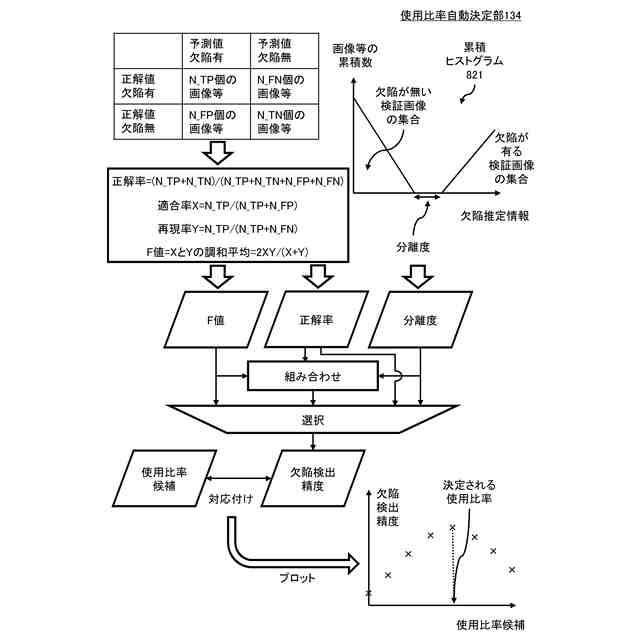
前記検証画像のそれぞれには、欠陥の有無に関する正解ラベルが対応付けられており、
前記欠陥検出の精度は、
前記検証画像についての欠陥の有無に関する予測値の正解率、
前記検証画像についての、前記正解ラベルが示す欠陥の有無に関する正解値と、前記欠陥推定情報による欠陥の有無に関する予測値の組み合わせに対して算出される、適合率と再現率の調和平均であるF値、
欠陥を有さない前記検証画像の集合と、欠陥を有する前記検証画像の集合との間のヒストグラムにおける分離度の少なくともいずれかに基づいて算出される
請求項1に記載された外観検査装置。
【請求項7】
前記プロセッサは、
前記使用比率に基づいて、前記検証画像の欠陥度を示す欠陥度マップを前記表示部に表示させ、
ユーザから、前記使用比率の変更を受け付けると、前記変更後の使用比率に基づいて、前記検証画像の欠陥度を示す更新欠陥度マップを出力し、
前記表示部に前記更新欠陥度マップを表示させる
請求項1に記載された外観検査装置。
【請求項8】
前記プロセッサは、
複数の検証画像のそれぞれに対して、第1使用比率に基づいて出力された複数の欠陥度マップを前記表示部に一括表示させ、
ユーザから、前記第1使用比率を第2使用比率に変更する入力を受け付け可能に構成され、
前記複数の検証画像のそれぞれに対して、前記第2使用比率に基づいて出力された複数の更新欠陥度マップを前記表示部に一括表示させる
請求項7に記載された外観検査装置。
【請求項9】
前記第1機械学習モデルおよび前記第2機械学習モデルのそれぞれは、機械学習の実行の際に、互いに同じ学習画像または当該学習画像から得られる特徴マップが入力されることにより訓練されるものである
請求項1に記載された外観検査装置。
【請求項10】
検査対象物が撮像された検査対象画像に含まれる欠陥を、機械学習モデルを用いて検出する外観検査方法であって、
前記検査対象物が撮像された学習画像を用いて、第1機械学習モデルおよび第2機械学習モデルを訓練するステップと、
訓練された前記第1機械学習モデルおよび前記第2機械学習モデルを用いて、前記検査対象物が撮像された検証画像に含まれる欠陥を検出するステップと、
前記検証画像に対する前記第1機械学習モデルおよび前記第2機械学習モデルの欠陥検出の精度に基づいて、当該前記第1機械学習モデルおよび前記第2機械学習モデルの使用比率を決定するステップと、
前記使用比率に基づいて、前記前記第1機械学習モデルおよび前記第2機械学習モデルの少なくとも一方を用いて、前記検査対象画像に含まれる欠陥を検出するステップと、
を備え、
前記機械学習モデルは、第1機械学習モデルと、第2機械学習モデルと、を含み、
前記第1機械学習モデルは、前記第2機械学習モデルよりも、位置依存性のある欠陥を検出しやすいものであり、
前記第2機械学習モデルは、前記第1機械学習モデルよりも、位置依存性の無い欠陥を検出しやすいものである
外観検査方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、検査対象画像に含まれる欠陥を検出する外観検査技術に関するものである。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来から、検査対象物を撮像して得た検査対象画像に含まれる欠陥を検出することが知られている。近年は、例えば深層ニューラルネットワークにより表現されるモデルを機械学習により訓練して得た学習済みモデルを用いて、検査対象画像に含まれる欠陥を検出することが検討される。
【0003】
特許文献1には、対象物を撮像して得た画像データを5つの学習済み畳み込みニューラルネットワーク(CNN)に入力して、CNNのそれぞれが、画像データに示される対象物が不良品であるか否かを判定する良否判定を行う先行技術が開示されている。特許文献1では、機械学習によりCNNのそれぞれが訓練される際に、CNN毎に互いに異なる画像データセットを用いた機械学習が行われるため、画像データセットと処理負荷とが増大してしまう。また、特許文献1は、不良品と判定したCNNが1つでもあれば不良品と最終判定するため、CNNを多く準備することにより検出漏れは抑えられる一方で、過検出が増えてしまう。
【先行技術文献】
【特許文献】
【0004】
特開2020-46731号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
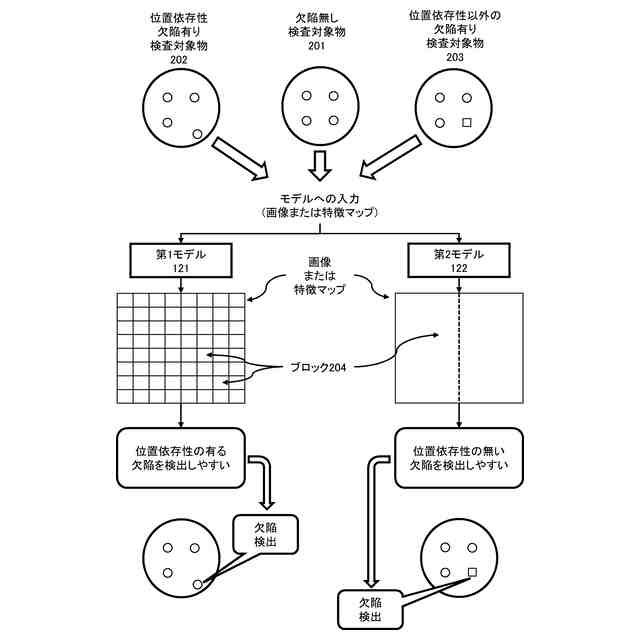
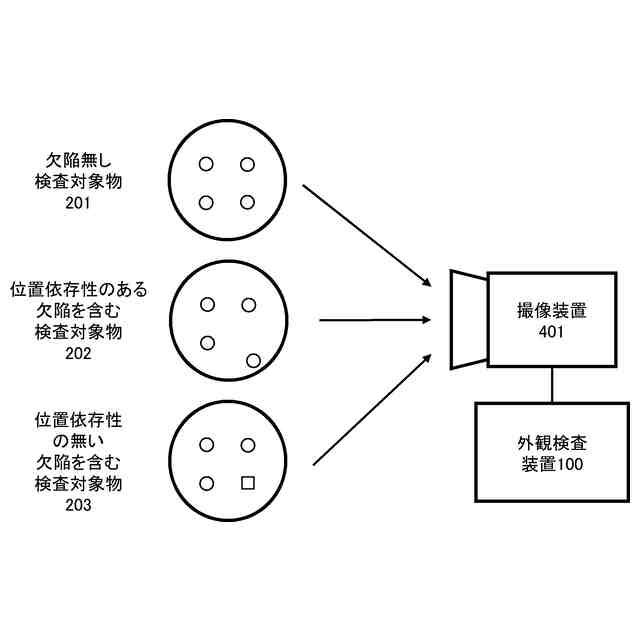
ところで、外観検査の対象となる欠陥には様々な種類があり、例えば傷、汚れ、異物、位置ずれなどがある。ここで、本明細書では、例えば、傷、汚れ、異物、ひび割れ、腐食を検査対象物の表面状態に関する欠陥として「位置依存性の無い欠陥」と表現する。これに対して、例えば、位置ずれ、傾き、反りを、検査対象物(の一部)が本来あるべき位置にいない欠陥として「位置依存性のある欠陥」と表現する。機械学習モデルもアルゴリズムの特性やパラメータ設計によって、「位置依存性のある欠陥」と「位置依存性の無い欠陥」のどちらをより精度良く検出できるかは変わってくる。また、ユーザの検査ニーズも様々であり、「位置依存性のある欠陥」を検出したいのか、「位置依存性の無い欠陥」を検出したいのか、両方の欠陥を検出したいのかは、ユーザがどのような検査対象物に対して、どのような検査を実行したいのかに依存する。
【0006】
本開示は、かかる点に鑑みてなされたものであり、その目的とするところは、ユーザの検出したい欠陥の種類に応じた検出性能を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本開示が備えうる特徴は、例えば次のとおりである。
本開示の1つは、検査対象物が撮像された検査対象画像に含まれる欠陥を、機械学習モデルを用いて検出するプロセッサを備える外観検査装置であって、前記機械学習モデルは、第1機械学習モデルと、第2機械学習モデルと、を含み、前記第1機械学習モデルは、前記第2機械学習モデルよりも、位置依存性のある欠陥を検出しやすいものであり、前記第2機械学習モデルは、前記第1機械学習モデルよりも、位置依存性の無い欠陥を検出しやすいものであり、前記プロセッサは、前記検査対象物が撮像された学習画像を用いて、前記第1機械学習モデルおよび前記第2機械学習モデルを訓練し、訓練された前記第1機械学習モデルおよび前記第2機械学習モデルを用いて、前記検査対象物が撮像された検証画像に含まれる欠陥を検出し、前記検証画像に対する前記第1機械学習モデルおよび前記第2機械学習モデルの欠陥検出の精度に基づいて、前記第1機械学習モデルおよび前記第2機械学習モデルの使用比率を決定し、前記使用比率に基づいて、前記第1機械学習モデルおよび前記第2機械学習モデルの少なくとも一方を用いて、前記検査対象画像に含まれる欠陥を検出する外観検査装置である。
【発明の効果】
【0008】
以上のように、本開示は、位置依存性のある欠陥を検出しやすい第1機械学習モデルおよび位置依存性の無い欠陥を検出しやすい第2機械学習モデルの使用比率を決定し、当該使用比率に基づいて、第1機械学習モデルおよび前記第2機械学習モデルの少なくとも一方を用いて、検査対象画像に含まれる欠陥を検出するので、検査対象物の種類や要望する検査内容に応じた設定による、柔軟な運用が可能な外観検査を実現することが出来る。
【0009】
上記の外観検査装置が実現する処理と同様のことを実現する外観検査方法や外観検査プログラムも、上記の外観検査装置と同様の作用効果を得ることが出来る。更に、プログラムの態様であれば、多くの場合で費用は削減される。プログラムでは、処理に関する設計変更も行われやすい。
上記以外の本開示が備えうる特徴、及び、当該特徴に対応する作用効果は、この明細書、特許請求の範囲または図面に開示される。
【図面の簡単な説明】
【0010】
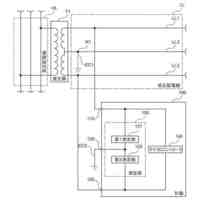
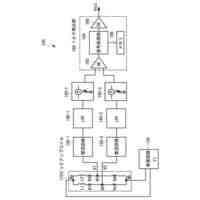
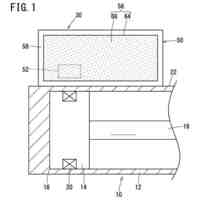
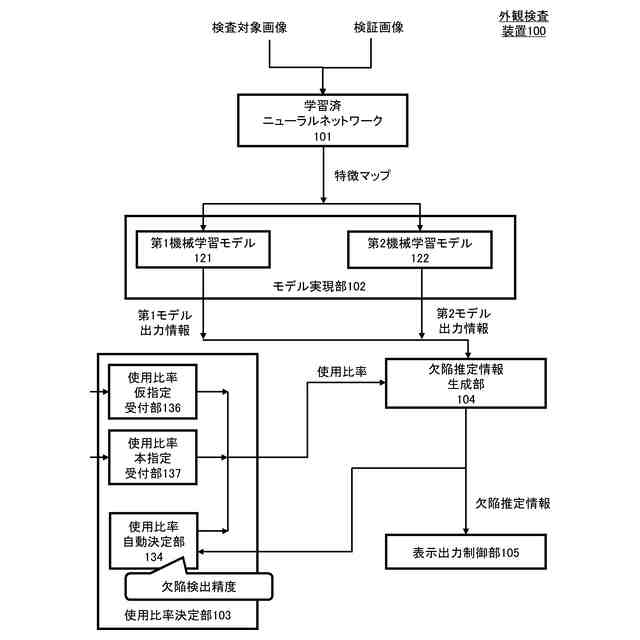
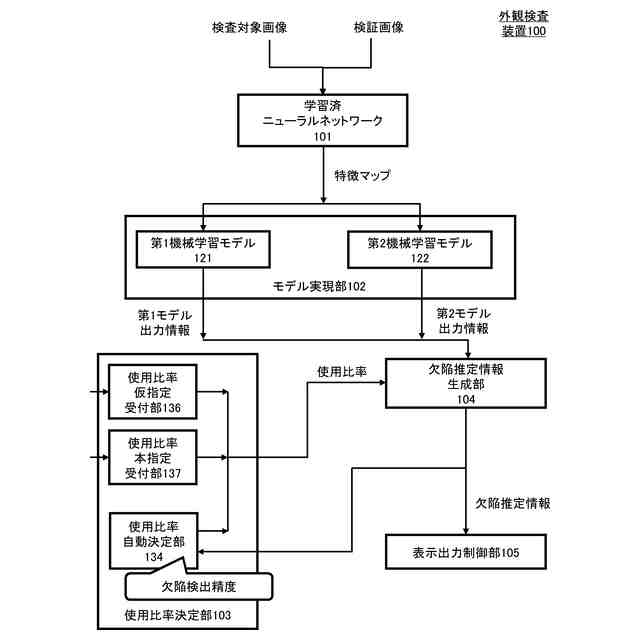
本開示の実施形態の機能構成を示す。
モデルのそれぞれが検出しやすい欠陥を示す。
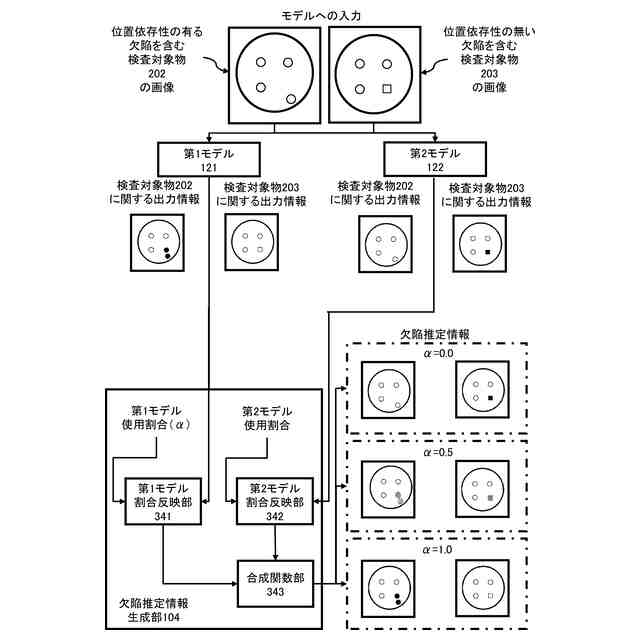
モデル出力情報と、使用比率に対応する欠陥推定情報を示す。
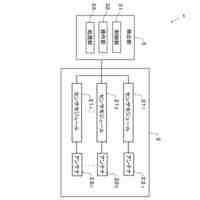
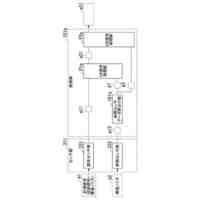
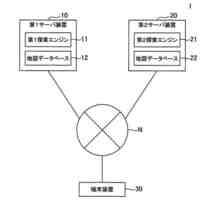
本開示の実施形態を含むシステム全体のシステム構成を示す。
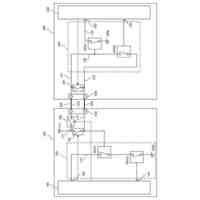
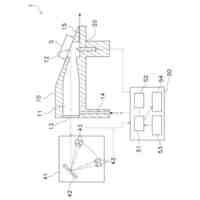
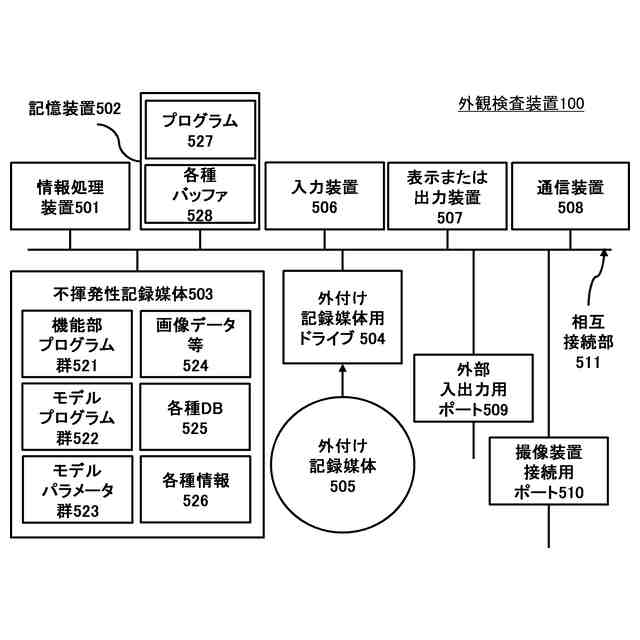
本開示の実施形態を実現するコンピュータアーキテクチャを示す。
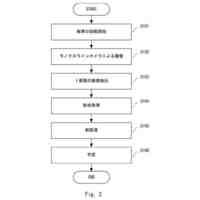
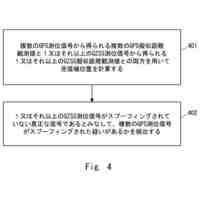
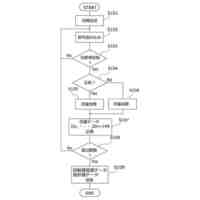
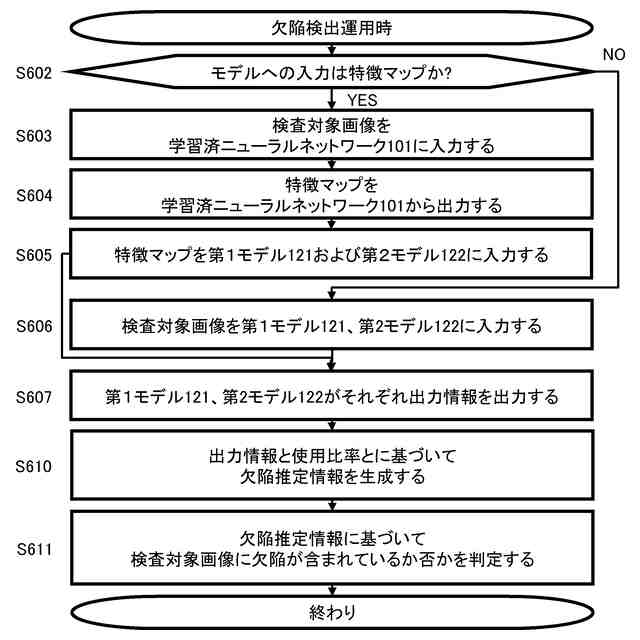
欠陥検出運用時の処理のフローチャートを示す。
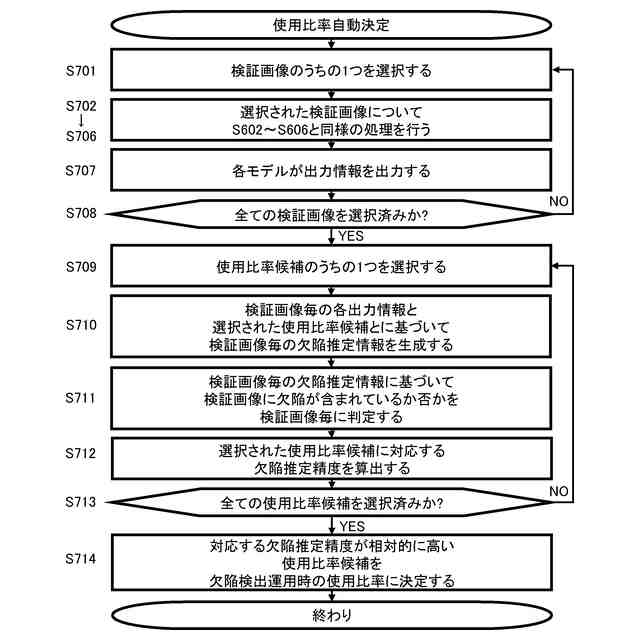
使用比率自動決定の処理のフローチャートを示す。
使用比率自動決定部の処理を示す。
使用比率手動決定前の欠陥度マップ表示等のフローチャートを示す。
欠陥度マップ表示等のための設定画面を示す。
同比率異画像一覧表示を示す。
同画像異比率一覧表示を示す。
モデルの訓練のための機械学習時における機能構成を示す。
モデルの訓練のための機械学習の処理のフローチャートを示す。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
計器装置
5日前
日本精機株式会社
表示装置
29日前
株式会社東光高岳
計器
1日前
日本精機株式会社
液面検出装置
7日前
大和製衡株式会社
組合せ秤
13日前
有限会社原製作所
検出回路
27日前
大和製衡株式会社
組合せ秤
7日前
大和製衡株式会社
組合せ秤
7日前
日本無線株式会社
レーダ装置
28日前
個人
フロートレス液面センサー
20日前
株式会社リコー
光学機器
27日前
大和製衡株式会社
組合せ計量装置
29日前
日本特殊陶業株式会社
ガスセンサ
19日前
ダイハツ工業株式会社
試験用治具
13日前
キヤノン株式会社
放射線撮像装置
22日前
日本特殊陶業株式会社
ガスセンサ
8日前
日本特殊陶業株式会社
ガスセンサ
8日前
大同特殊鋼株式会社
座標系較正方法
22日前
富士電機株式会社
エンコーダ
今日
富士電機株式会社
エンコーダ
今日
株式会社クボタ
作業車
12日前
株式会社フジキン
流量測定装置
14日前
トヨタ自動車株式会社
歯車の検査方法
8日前
TDK株式会社
計測装置
6日前
株式会社ノーリツ
通信システム
5日前
大同特殊鋼株式会社
ラベル色特定方法
22日前
新電元メカトロニクス株式会社
位置検出装置
5日前
旭光電機株式会社
漏出検出装置
19日前
株式会社アステックス
ラック型負荷装置
20日前
住友化学株式会社
積層基板
19日前
日本電気株式会社
測位装置及びその方法
1日前
株式会社島津製作所
発光分析装置
5日前
パイオニア株式会社
評価装置
12日前
タカハタプレシジョン株式会社
水道メータ
5日前
SMC株式会社
位置検出センサ
12日前
東芝ライテック株式会社
センサ装置
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ