TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025103362
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023220713
出願日
2023-12-27
発明の名称
車両制御システム
出願人
マツダ株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/09 20120101AFI20250702BHJP(車両一般)
要約
【課題】ドライバの異常検知から所定の待機時間が経過したときの車両周辺の障害物や道路端までの距離を確保することが可能な、車両制御システムを提供する。
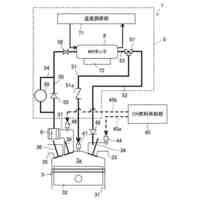
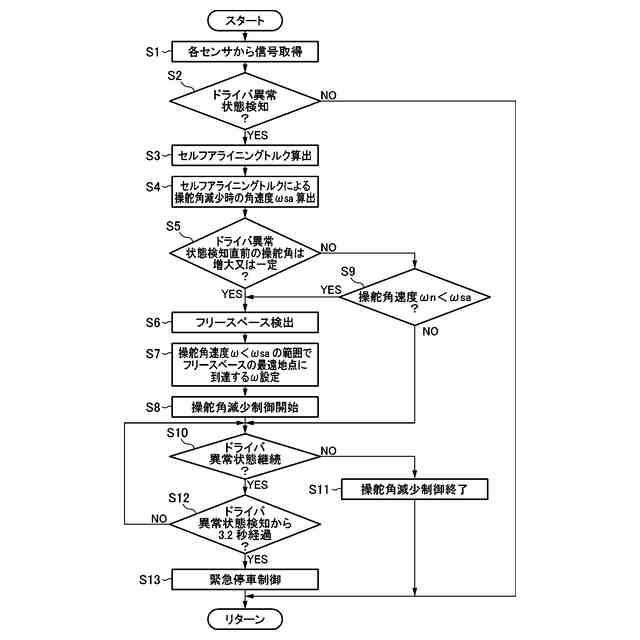
【解決手段】車両制御システム(100)は、車両(1)の操舵装置(5)に操舵力を付与するEPS(33)と、操舵角センサ(27)と、ドライバの異常が検知された後、ドライバの異常が所定時間継続した場合に、車両を停止させるように、車両を制御するように構成されたECU(10)とを備え、ECUは、ドライバの異常が検知された場合、車両の操舵輪に発生するセルフアライニングトルクにより操舵角が減少するときのセルフアライニング角速度(ωsa)を算出し、ドライバの異常検知から所定時間が経過するまでの間、セルフアライニング角速度より小さい角速度で操舵角が減少するように、EPSによって操舵装置に操舵力を付与させる操舵角減少制御を実行するように構成されている。
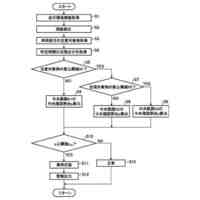
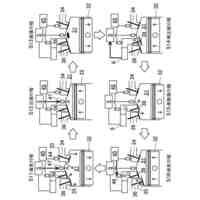
【選択図】図3
特許請求の範囲
【請求項1】
車両のドライバの異常を検知するドライバ異常検知装置と、
前記車両の操舵装置に操舵力を付与するパワーステアリング装置と、
前記操舵装置の操舵角を取得する操舵角センサと、
前記ドライバ異常検知装置により前記ドライバの異常が検知された後、前記ドライバの異常が所定時間継続した場合に、前記車両を停止させるように、前記車両を制御するように構成されたコントローラと、を備え、
前記コントローラは、
前記ドライバ異常検知装置により前記ドライバの異常が検知された場合、
前記車両の操舵輪に発生するセルフアライニングトルクにより操舵角が減少するときのセルフアライニング角速度を算出し、
前記ドライバの異常検知から前記所定時間が経過するまでの間、前記セルフアライニング角速度より小さい角速度で操舵角が減少するように、前記パワーステアリング装置によって前記操舵装置に操舵力を付与させる操舵角減少制御を実行する、
ように構成されている、
車両制御システム。
続きを表示(約 620 文字)
【請求項2】
前記コントローラは、
前記ドライバ異常検知装置により前記ドライバの異常が検知された場合において、前記ドライバの異常検知直前に前記操舵角が増大していた又は一定であった場合に、前記操舵角減少制御を実行するように構成されている、
請求項1に記載の車両制御システム。
【請求項3】
前記コントローラは、
前記ドライバ異常検知装置により前記ドライバの異常が検知された場合において、前記ドライバの異常検知直前に前記操舵角が前記セルフアライニング角速度より小さい角速度で減少していた場合に、前記操舵角減少制御を実行するように構成されている、
請求項1又は2に記載の車両制御システム。
【請求項4】
前記車両の進行方向における走行可能領域を検出する走行可能領域検出装置を備え、
前記コントローラは、
前記操舵角減少制御を実行する場合、
前記ドライバの異常検知時の走行可能領域を検出し、
前記セルフアライニング角速度より小さい角速度で操舵角を減少させたときの前記車両の予測走行経路を、複数の前記角速度について予測し、
前記走行可能領域内における前記予測走行経路の経路長が最も長くなるときの前記角速度で操舵角が減少するように、前記操舵角減少制御を実行する、
ように構成されている、
請求項1又は2に記載の車両制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、ドライバが安全に運転できない状態に陥った場合に異常を検知し車両を自動的に停止させるドライバ異常時対応システムの開発が進められている。例えば、ドライバの姿勢の崩れを検出することによりドライバの異常を検知した場合に、車線を維持しながら徐々に車両を減速させ、可能な場合には路肩等に車両を寄せて自動停止させること等が想定されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-13394号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したようなドライバ異常時対応システムでは、ドライバの異常状態の検知が誤検知である可能性を考慮し、異常検知から所定の待機時間(例えば3.2秒)が経過した後に停車制御を開始するようになっている。待機時間中にドライバの異常状態が検知されなくなった場合や、ドライバ自身が異常検知のキャンセルスイッチを押した場合には、減速制御の実行がキャンセルされる。
【0005】
実際にドライバに異常が発生しており運転操作が不可能な状態である場合、待機時間中に車両が走行路の中央近傍に留まるように、車線維持制御等の操舵介入を行うことが望ましい。しかしながら、白線などの車線境界線が無い道路を車両が走行しているときなど、通常の車線維持制御を行うことが困難な場合もある。そのような場合でも、待機時間が経過して停車制御を開始する時の道路端や障害物までの距離を少しでも大きく確保するためには、何らかの操舵介入を行うことが望ましい。
【0006】
本発明は、このような問題を解決するためになされたものであり、ドライバの異常検知から所定の待機時間が経過したときの車両周辺の障害物や道路端までの距離を確保することが可能な、車両制御システムを提供することを目的としている。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、本発明は、車両制御システムであって、車両のドライバの異常を検知するドライバ異常検知装置と、車両の操舵装置に操舵力を付与するパワーステアリング装置と、操舵装置の操舵角を取得する操舵角センサと、ドライバ異常検知装置によりドライバの異常が検知された後、ドライバの異常が所定時間継続した場合に、車両を停止させるように、車両を制御するように構成されたコントローラと、を備え、コントローラは、ドライバ異常検知装置によりドライバの異常が検知された場合、車両の操舵輪に発生するセルフアライニングトルクにより操舵角が減少するときのセルフアライニング角速度を算出し、ドライバの異常検知から所定時間が経過するまでの間、セルフアライニング角速度より小さい角速度で操舵角が減少するように、パワーステアリング装置によって操舵装置に操舵力を付与させる操舵角減少制御を実行する、ように構成されている。
【0008】
このように構成された本発明によれば、コントローラは、ドライバ異常検知装置によりドライバの異常が検知された場合、車両の操舵輪に発生するセルフアライニングトルクにより操舵角が減少するときのセルフアライニング角速度を算出し、ドライバの異常検知から所定時間が経過するまでの間、セルフアライニング角速度より小さい角速度で操舵角が減少するように、パワーステアリング装置によって操舵装置に操舵力を付与させる操舵角減少制御を実行するので、車両の旋回走行中にドライバの異常が検知された場合に、セルフアライニングトルクによる操舵角の減少を抑制することができる。これにより、ドライバの異常検知後、所定の待機時間が経過したときの、車両から道路端や障害物までの距離を確保することができる。
【0009】
本発明において、好ましくは、コントローラは、ドライバ異常検知装置によりドライバの異常が検知された場合において、ドライバの異常検知直前に操舵角が増大していた又は一定であった場合に、操舵角減少制御を実行するように構成されている。
【0010】
このように構成された本発明によれば、コントローラは、ドライバの異常が検知された場合において、ドライバの異常検知直前に操舵角が増大していた又は一定であった場合に、操舵角減少制御を実行するので、異常検知以降も車両の旋回状態が継続していると考えられ、操舵介入を行うことが望ましい場合に、セルフアライニングトルクによる操舵角の減少を抑制することができる。これにより、ドライバの異常検知後、所定の待機時間が経過したときの、車両から道路端や障害物までの距離を確実に確保することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
マツダ株式会社
モータシステム
23日前
マツダ株式会社
モータシステム
23日前
マツダ株式会社
モータシステム
23日前
マツダ株式会社
モータシステム
23日前
マツダ株式会社
冷媒循環システム
23日前
マツダ株式会社
車両用リッド構造
15日前
マツダ株式会社
冷媒循環システム
23日前
マツダ株式会社
冷媒循環システム
23日前
マツダ株式会社
冷媒循環システム
23日前
マツダ株式会社
冷媒循環システム
23日前
マツダ株式会社
燃料改質システム
2日前
マツダ株式会社
水噴射式エンジン
16日前
マツダ株式会社
水噴射式エンジン
16日前
マツダ株式会社
車両の下部車体構造
29日前
マツダ株式会社
車両の下部車体構造
29日前
マツダ株式会社
車両の下部車体構造
29日前
マツダ株式会社
ドライバ状態推定装置
11日前
マツダ株式会社
ドライバ状態推定装置
11日前
マツダ株式会社
ドライバ状態推定装置
2日前
マツダ株式会社
ドライバ状態推定装置
2日前
マツダ株式会社
ドライバ状態推定装置
11日前
マツダ株式会社
エンジンオイル冷却構造
8日前
マツダ株式会社
車両の燃料改質システム
2日前
マツダ株式会社
車両の燃料改質システム
2日前
マツダ株式会社
車両の燃料改質システム
2日前
マツダ株式会社
車両の燃料改質システム
2日前
マツダ株式会社
内燃機関の吸気音増幅装置
10日前
マツダ株式会社
エンジン搭載車両の燃料改質システム
2日前
マツダ株式会社
車両のドライバインターフェース装置
15日前
マツダ株式会社
エンジン搭載車両の燃料改質システム
2日前
マツダ株式会社
車両のドライバインターフェース装置
15日前
マツダ株式会社
エンジン搭載車両の燃料改質システム
2日前
マツダ株式会社
車両のドライバインターフェース装置
15日前
マツダ株式会社
車両の空調制御方法及び車両の空調制御装置
28日前
西川ゴム工業株式会社
自動車ドア用グラスラン
17日前
個人
カーテント
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ