TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025104241
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2024176654
出願日
2024-10-08
発明の名称
軸受損傷検出システム及び軸受損傷検出方法
出願人
日本精工株式会社
代理人
弁理士法人栄光事務所
主分類
G01M
13/045 20190101AFI20250702BHJP(測定;試験)
要約
【課題】転がり軸受の軌道面等の各部の損傷を早期に検出できる軸受損傷検出システム及び軸受損傷検出方法を提供する。
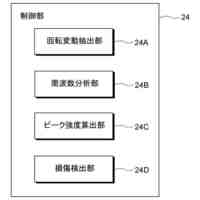
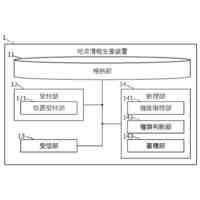
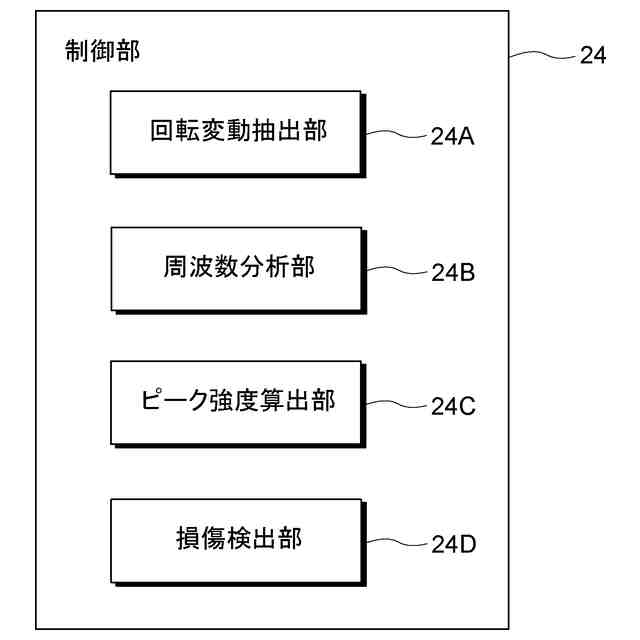
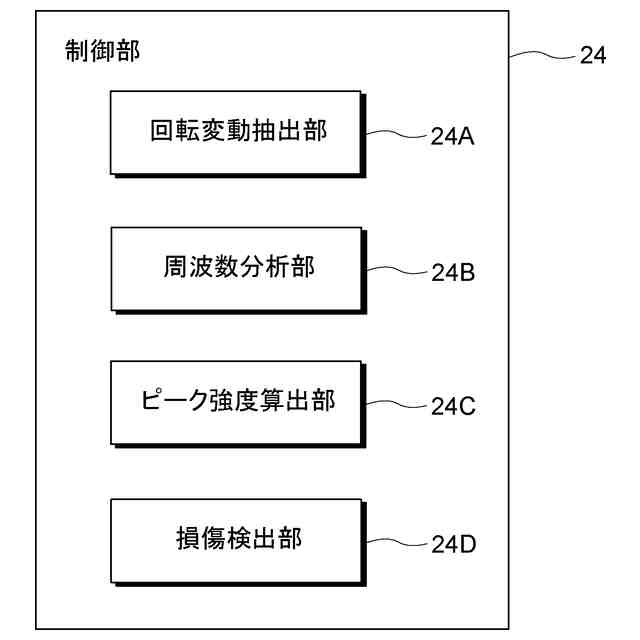
【解決手段】軸受損傷検出システムは、転がり軸受の回転を検出して回転信号を出力する回転センサと、回転信号から転がり軸受の回転変動を抽出して回転変動信号を生成する回転変動抽出部24Aと、回転変動信号の波形を周波数分析して周波数特性を求める周波数分析部24Bと、周波数特性から軸受損傷に対応するピーク強度を求めるピーク強度算出部24Cと、ピーク強度に基づき転がり軸受の軸受損傷を検出する損傷検出部24Dと、を備える。回転変動抽出部24Aは、種々のノイズを除去した回転変動信号の波形を求める。
【選択図】図2
特許請求の範囲
【請求項1】
転がり軸受の回転を検出して回転信号を出力する回転センサと、
前記回転信号から前記転がり軸受の回転変動を抽出して回転変動信号を生成する回転変動抽出部と、
前記回転変動信号の波形を周波数分析して周波数特性を求める周波数分析部と、
前記周波数特性から軸受損傷に対応するピーク強度を求めるピーク強度算出部と、
前記ピーク強度に基づき前記転がり軸受の軸受損傷を検出する損傷検出部と、
を備える軸受損傷検出システム。
続きを表示(約 1,500 文字)
【請求項2】
前記回転信号から前記転がり軸受の回転に同期したパルス信号にするパルス信号生成部を備え、
前記回転変動抽出部は、
前記パルス信号のそれぞれのパルスについて、個々のパルスのパルス周期Tpの推移を表すパルス周期波形と、
前記パルス信号のいずれかの前記パルスを中心とする前記転がり軸受の1回転分の回転周期Tの推移を表す回転周期波形と、
を求め、
前記パルス周期Tpと前記回転周期Tとの比Tp/Tを表す周期比波形に基づき前記回転変動信号の波形を求める、
請求項1に記載の軸受損傷検出システム。
【請求項3】
前記回転変動抽出部は、
前記周期比波形と、前記周期比波形を平滑化した周期比平滑化波形との差分を表す周期比差分波形に基づき前記回転変動信号の波形を求める、
請求項2に記載の軸受損傷検出システム。
【請求項4】
前記回転変動抽出部は、
前記周期比差分波形における前記転がり軸受の同じ回転位置に対応する前記差分同士を前記回転位置毎に平均化した周期比平均値波形を求め、
前記周期比差分波形と、前記周期比平均値波形との差分を前記回転位置毎に求めた周期比変動波形に基づき、前記回転変動信号の波形を求める、
請求項3に記載の軸受損傷検出システム。
【請求項5】
前記周期比平均値波形は、前記周期比差分波形を求めた前記回転信号、又は当該回転信号に続いて連続して出力された回転信号を用いて求めた波形である、
請求項4に記載の軸受損傷検出システム。
【請求項6】
前記回転センサは、前記転がり軸受の鉛直方向の中間位置で、水平方向の一方の端部で回転を検出する第1回転センサと、水平方向の他方の端部で回転を検出する第2回転センサとを有する、
請求項1に記載の軸受損傷検出システム。
【請求項7】
前記回転信号は、前記第1回転センサから出力される第1パルス信号と、前記第2回転センサから出力される第2パルス信号であり、
前記第1パルス信号又は前記第2パルス信号のパルスについて、当該パルスを中心とする前記転がり軸受の1回転分の回転周期Tの推移を表す回転周期波形と、
前記第1パルス信号と前記第2パルス信号とのパルスの位相差PDの推移を表す位相差波形と、
を求め、
前記位相差PDと前記回転周期Tとの比PD/Tを表す位相差比波形に基づき前記回転変動信号の波形を求める、
請求項6に記載の軸受損傷検出システム。
【請求項8】
前記回転変動抽出部は、
前記位相差比波形と、前記位相差比波形を平滑化した位相差比平滑化波形との差分を表す位相差比差分波形に基づき前記回転変動信号の波形を求める、
請求項7に記載の軸受損傷検出システム。
【請求項9】
前記回転変動抽出部は、
前記位相差比差分波形における前記転がり軸受の同じ回転位置に対応する前記差分同士を前記回転位置毎に平均化した位相差比平均値波形を求め、
前記位相差比差分波形と、前記位相差比平均値波形との差分を前記回転位置毎に求めた位相差比変動波形に基づき、前記回転変動信号の波形を求める、
請求項8に記載の軸受損傷検出システム。
【請求項10】
前記位相差比平均値波形は、前記位相差比差分波形を求めた前記回転信号、又は当該回転信号に続いて連続して出力された回転信号を用いて求めた波形である、
請求項9に記載の軸受損傷検出システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、軸受損傷検出システム及び軸受損傷検出方法に関する。
続きを表示(約 4,000 文字)
【背景技術】
【0002】
自動車の車輪を構成するホイール、及び制動装置であるディスクブレーキやドラムブレーキを構成するディスクロータは、車両用転がり軸受ユニット(以下、ハブユニットという)を介して車体の懸架装置に回転自在に支承されている。このハブユニット軸受の外輪とハブ輪は、炭素含有量が0.5~0.6質量%の中炭素鋼を熱間鍛造した後、軌道面を熱処理して製作される。しかし、ハブ輪の内輪軌道面部は比較的肉厚であるが、外輪軌道面部は肉薄なため、フレーキング等の軌道面の損傷は外輪軌道面に発生することが多い。また、ハブユニットに強い外力が作用した場合、転動体が外輪軌道面に圧痕を形成させることもある。
【0003】
また、上記した中炭素鋼は、軸受鋼(C:1質量%)に比べて靭性が高いので、動的最大せん断応力位置でのクラックは軌道面表面に向かっては伸展し難く、軌道面表面と平行にクラックが進行する。この様なクラックの場合、初期には表面が剥がれず、クラックから軌道面表面に至る部分が転動体にのされて凹むだけであるため、振動や音響の悪化が少ない。ところが、クラックの進展に伴いクラックが軌道面に表出すると、一気に剥離が進展する。また、圧痕についても同様に、振動や音響に影響を及ぼすことになる。このような、ある時点から剥離が一気に進展する破損モードは、例えば、運転者からホイール軸受までの距離が遠く、運転者が小さな損傷を検知しにくい大型トラック等の車両の場合には好ましくない。また、将来的なドライバーレス車両や隊列走行を考慮すると、ハブユニット軸受の損傷が小さい段階で上記した剥離や圧痕等の損傷を検知することが望まれる。
【0004】
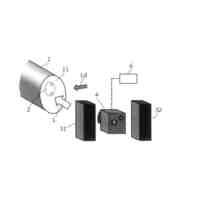
例えば、特許文献1のハブユニット軸受300は、図43に示すように、複列の外輪軌道301aを備える外輪301と、複列の内輪軌道302aを備えるハブ302と、外輪軌道301aと内輪軌道302aとの間に転動自在に設けられた複数の転動体303と、を有する。ハブユニット軸受300は、ハブ302の軸方向両側にエンコーダ304が設けられ、それぞれのエンコーダ304に対向する不図示のセンサの検出信号同士の間の位相差に基づいて、ハブ302に加わるトルクを検出可能としている。
【先行技術文献】
【特許文献】
【0005】
特開2004-19934号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記のようなハブユニット軸受の外輪及びハブ、特に外輪軌道面の損傷は、振動や音響の悪化の要因であり、早期に検出することが望ましい。しかし、特許文献1のハブユニットでは、トルクの検出は行えても発生する損傷までは検出できない。また、このような損傷の検出は、車両のハブユニット軸受に限らず、転がり軸受を用いた他の支承機構についても同様であり、早期の検出が望まれている。
【0007】
そこで本発明は、転がり軸受の軌道面等の各部の損傷を早期に検出できる軸受損傷検出システム及び軸受損傷検出方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は下記の構成からなる。
(1) 転がり軸受の回転を検出して回転信号を出力する回転センサと、
前記回転信号から前記転がり軸受の回転変動を抽出して回転変動信号を生成する回転変動抽出部と、
前記回転変動信号の波形を周波数分析して周波数特性を求める周波数分析部と、
前記周波数特性から軸受損傷に対応するピーク強度を求めるピーク強度算出部と、
前記ピーク強度に基づき前記転がり軸受の軸受損傷を検出する損傷検出部と、
を備える軸受損傷検出システム。
(2) 転がり軸受の回転を検出して回転信号を生成し、
前記回転信号から前記回転の回転変動を抽出して回転変動信号を生成し、
前記回転変動信号の波形を周波数分析して振動ピークを求め、
前記振動ピークから軸受損傷に対応するピーク強度を求め、
前記ピーク強度に基づき前記転がり軸受の軸受損傷を検出する、
を備える軸受損傷検出方法。
【発明の効果】
【0009】
本発明によれば、転がり軸受の軌道面等の各部の損傷を早期に検出できる。
【図面の簡単な説明】
【0010】
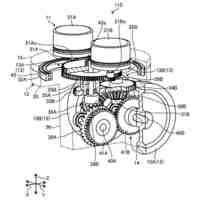
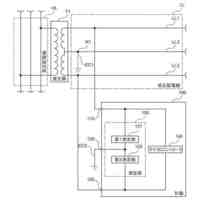
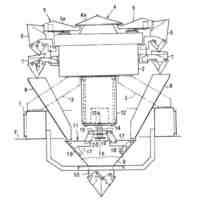
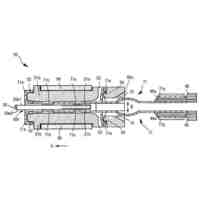
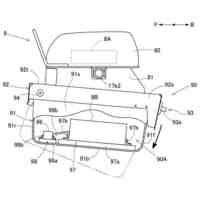
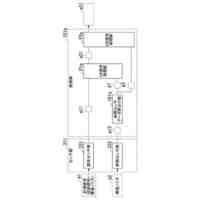
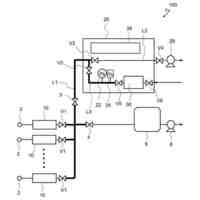
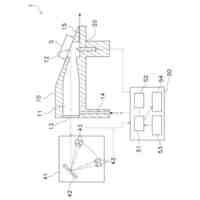
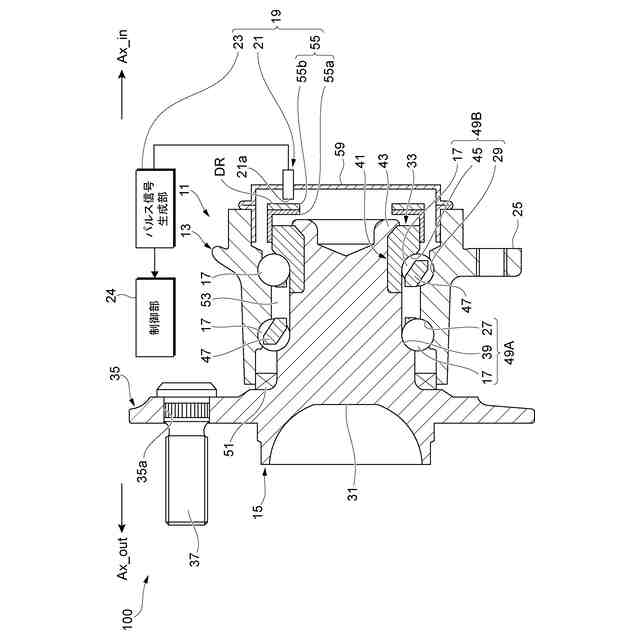
図1は、第1実施形態に係るハブユニット軸受の軸受損傷検出システムの概略構成図である。
図2は、制御部の機能ブロック図である。
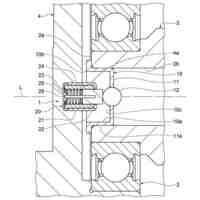
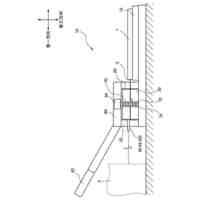
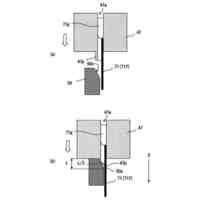
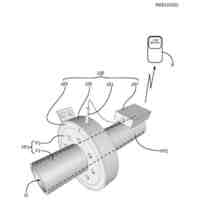
図3は、センサの配置位置を模式的に示す説明図である。
図4は、パルス信号生成部の概略的な回路図である。
図5は、外輪軌道の一部に剥離が生じた場合の振動の発生の様子を模式的に示す説明図である。
図6は、外輪軌道の剥離による内輪と外輪との相対変位がセンサ出力に与える変化を示す説明図である。
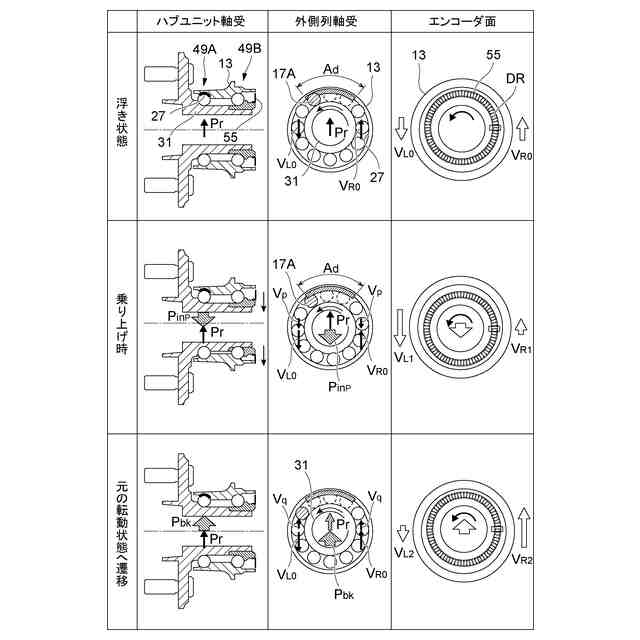
図7は、転動体の浮き状態と、乗り上げ状態と、元の転動状態とに遷移した際のセンサからのセンサ出力信号の変化を概略的に示す説明図である。
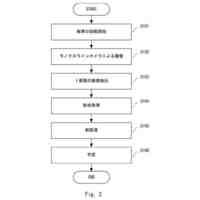
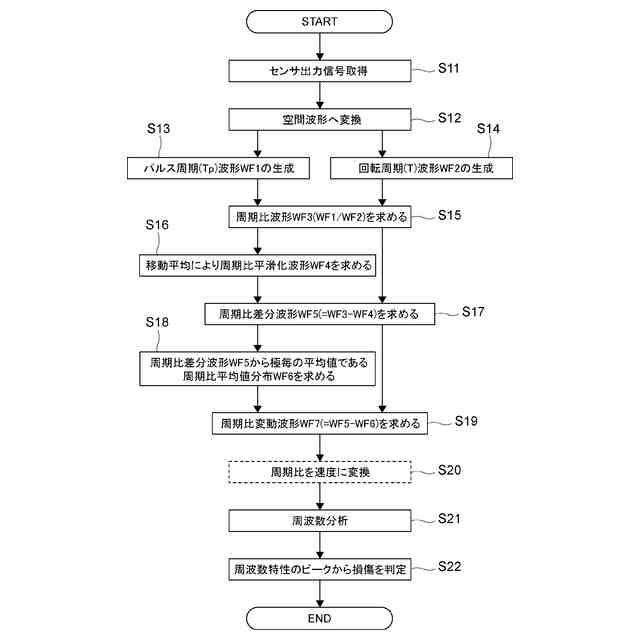
図8は、ハブユニット軸受の損傷の判定を行う手順を示すフローチャートである。
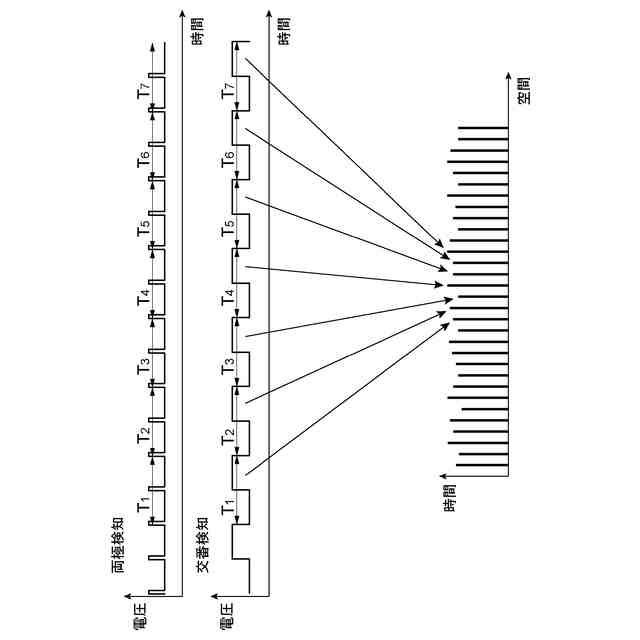
図9は、センサからのセンサ出力信号に応じたパルス信号と、このパルス信号の各パルスの周期をプロットした空間波形を示す説明図である。
図10は、パルス信号のうち任意のパルスの周期と、そのパルスを中心とするハブ軸の1回転分のパルスを概略的に示す説明図である。
図11は、パルス信号のうち任意のパルスの周期と、そのパルスを中心とするハブ軸の1回転分のパルスを概略的に示す説明図である。
図12は、パルス出力信号からハブ軸の回転変動を抽出して回転変動信号を生成するまでの波形の一例を示す説明図である。
図13は、磁気エンコーダの極毎の周期比差分の平均値である周期比平均値分布の例を示す説明図である。
図14は、周期比変動波形を概略的に示す説明図である。
図15は、周期比変動波形をFFT処理して得た周波数特性を概略的に示す説明図である。
図16は、参考例として示すパルス周期波形の周波数特性の説明図である。
図17は、図8に示すフローチャートの手順を一部変更した損傷判定の他の手順を示すフローチャートである。
図18は、図8に示すフローチャートの手順を一部変更した損傷判定の他の手順2を示すフローチャートである。
図19は、図8に示すフローチャートの手順を一部変更した損傷判定の他の手順3を示すフローチャートである。
図20は、図8に示すフローチャートの手順を一部変更した損傷判定の他の手順4を示すフローチャートである。
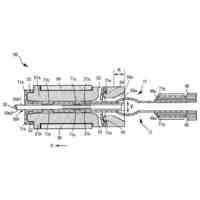
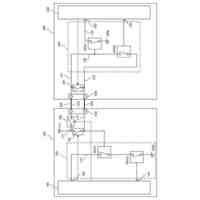
図21は、第2実施形態に係るハブユニット軸受の損傷検出システムの概略構成図である。
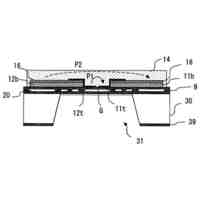
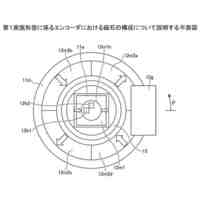
図22は、ハブユニット軸受の内輪、外輪及び磁気エンコーダと、回転センサの検出領域及び回転センサの検出領域との配置関係を模式的に示す説明図である。
図23は、パルス信号生成部の概略的な回路図である。
図24は、パルス信号及び位相差信号の波形例を示す説明図である。
図25は、外輪軌道の剥離による内外輪の相対変位がセンサ出力に与える影響を示す説明図である。
図26は、エンコーダの変位と検出されるパルス信号の位相差との関係を示す説明図である。
図27は、パルス信号PL_A,PL_B及び位相差信号PDの変化の例を示す説明図である。
図28は、具体的なパルス信号PL_A,PL_B及び位相差信号PDの波形を模式的に示す説明図である。
図29は、2つのセンサを用いてハブユニット軸受の損傷の判定を行う手順を示すフローチャートである。
図30は、パルス信号PL_Aとパルス信号PL_Bの波形を示す説明図である。
図31は、横軸をパルス信号のパルスの順番を表す空間、縦軸を時間として、周期Tiと位相差の変化を示す説明図である。
図32は、パルス出力信号からハブ軸の回転変動を抽出して回転変動信号を生成するまでの波形の一例を示す説明図である。
図33は、位相差比平均値分布の一例を示す説明図である。
図34は、位相差比変動波形を概略的に示す説明図である。
図35は、位相差比変動波形をFFT処理して得た周波数特性の例を示す説明図である。
図36は、図29に示すフローチャートの手順を一部変更した損傷判定の他の手順1を示すフローチャートである。
図37は、図29に示すフローチャートの手順を一部変更した損傷判定の他の手順2を示すフローチャートである。
図38は、図29に示すフローチャートの手順を一部変更した損傷判定の他の手順3を示すフローチャートである。
図39は、検出したパルス信号から差分波形を求めて回転変動波形を得るまでの制御ブロック図である。
図40は、検出用波形から転がり軸受の損傷判定を実施するまでのタイムチャート1を示す説明図である。
図41は、検出用波形から転がり軸受の損傷判定を実施するまでのタイムチャート2を示す説明図である。
図42は、検出用波形から転がり軸受の損傷判定を実施するまでのタイムチャート3を示す説明図である。
図43は、従来のハブユニット軸受の構成図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精工株式会社
風力発電装置
今日
日本精工株式会社
駆動輪及び台車
1日前
日本精工株式会社
ブラシユニット、及び接続装置
今日
日本精工株式会社
軸受損傷検出システム及び軸受損傷検出方法
今日
日本精機株式会社
計器装置
6日前
株式会社東光高岳
計器
2日前
日本精機株式会社
液面検出装置
8日前
大和製衡株式会社
組合せ秤
8日前
大和製衡株式会社
組合せ秤
14日前
大和製衡株式会社
組合せ秤
8日前
個人
フロートレス液面センサー
21日前
ダイハツ工業株式会社
試験用治具
14日前
キヤノン株式会社
放射線撮像装置
23日前
日本特殊陶業株式会社
ガスセンサ
9日前
日本特殊陶業株式会社
ガスセンサ
今日
日本特殊陶業株式会社
ガスセンサ
今日
エグゼヴィータ株式会社
端末装置
今日
日本特殊陶業株式会社
ガスセンサ
20日前
日本特殊陶業株式会社
ガスセンサ
9日前
柳井電機工業株式会社
部材検査装置
今日
株式会社クボタ
作業車
13日前
富士電機株式会社
エンコーダ
1日前
富士電機株式会社
エンコーダ
1日前
バイオテック株式会社
容器設置装置
今日
大同特殊鋼株式会社
座標系較正方法
23日前
TDK株式会社
計測装置
7日前
新電元メカトロニクス株式会社
位置検出装置
6日前
株式会社ノーリツ
通信システム
6日前
旭光電機株式会社
漏出検出装置
20日前
株式会社フジキン
流量測定装置
15日前
大同特殊鋼株式会社
ラベル色特定方法
23日前
トヨタ自動車株式会社
歯車の検査方法
9日前
日本電気株式会社
測位装置及びその方法
2日前
株式会社島津製作所
発光分析装置
6日前
株式会社アステックス
ラック型負荷装置
21日前
住友化学株式会社
積層基板
20日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ