TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025107089
公報種別
公開特許公報(A)
公開日
2025-07-17
出願番号
2024000856
出願日
2024-01-05
発明の名称
保持システム及び制御装置
出願人
コネクテッドロボティクス株式会社
代理人
個人
主分類
B25J
13/00 20060101AFI20250710BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対象物を保持して解放する時間の短縮を図ることができる保持システムを提供する。
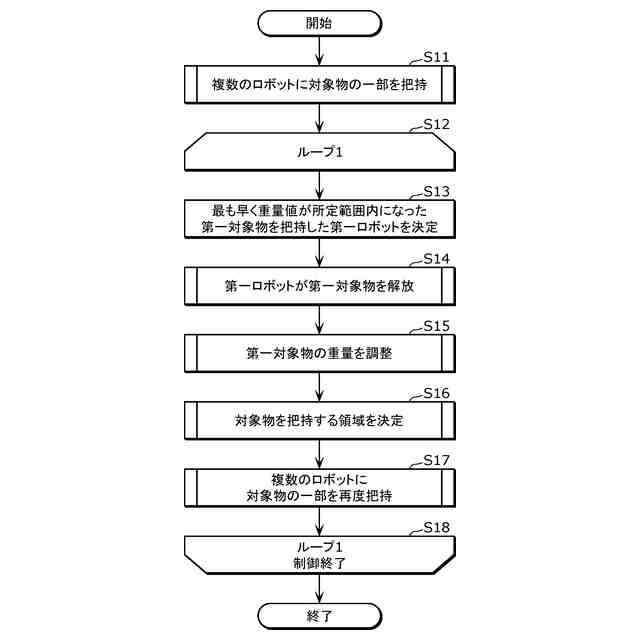
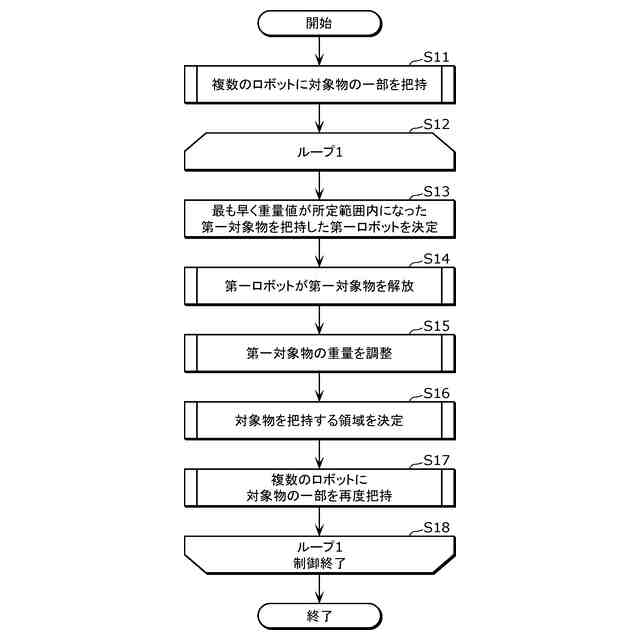
【解決手段】保持システム(把持システム1)は、対象物Tの一部を保持及び解放する複数のロボット10と、複数のロボット10の動作を制御する制御装置50と、を備え、制御装置50は、複数のロボット10のそれぞれに対象物Tの一部を保持させ(ステップS11)、複数のロボット10のうち、最も早く重量値が所定範囲内になった第一対象物を保持した第一ロボットに、第一対象物を解放させる(ステップS13、S14)。
【選択図】図7
特許請求の範囲
【請求項1】
対象物の一部を保持及び解放する複数のロボットと、
前記複数のロボットの動作を制御する制御装置と、を備え、
前記制御装置は、
前記複数のロボットのそれぞれに前記対象物の一部を保持させ、前記複数のロボットのうち、最も早く重量値が所定範囲内になった第一対象物を保持した第一ロボットに、前記第一対象物を解放させる
保持システム。
続きを表示(約 1,300 文字)
【請求項2】
前記制御装置は、前記第一ロボットが前記第一対象物を解放するまで、前記第一ロボットと異なる第二ロボットに、保持した第二対象物を解放させない
請求項1に記載の保持システム。
【請求項3】
前記制御装置は、前記第一ロボットと異なる第二ロボットに、保持した第二対象物を解放させ、前記対象物の一部を再度保持させる
請求項1または2に記載の保持システム。
【請求項4】
前記制御装置は、重量値が前記所定範囲外になった前記第二対象物を保持した前記第二ロボットに、前記第二対象物を保持した位置で解放させ、前記第二対象物が前記保持した位置に解放された後、前記第二対象物の重量値が前記所定範囲内になると推定される前記対象物の表面からの深さを修正し、前記第二ロボットを前記修正された深さまで差し込んで、解放された前記第二対象物の少なくとも一部を含めて、前記対象物の一部を再度保持させる
請求項3に記載の保持システム。
【請求項5】
前記制御装置は、前記第一対象物の重量値が第一所定値よりも小さいと判断した場合、前記複数のロボットのいずれかに前記対象物の一部を保持させ、前記複数のロボットのうち、最も早く重量値が、前記第一対象物の重量値と前記第一所定値との差分になった第三対象物を保持した第三ロボットに、前記第三対象物を解放させる
請求項1または2に記載の保持システム。
【請求項6】
前記制御装置は、前記第一対象物の重量値が第二所定値よりも大きいと判断した場合、前記複数のロボットのいずれかに前記第一対象物の一部を保持させ、前記複数のロボットのうち、最も早く重量値が、前記第一対象物の重量値と前記第二所定値との差分になった第四対象物を保持した第四ロボットに、前記第四対象物を前記第一対象物と異なる位置に解放させる
請求項1または2に記載の保持システム。
【請求項7】
前記制御装置は、前記複数のロボットのうちの一のロボットに第一領域に位置する対象物を保持させ、他のロボットに第二領域に位置する対象物を保持させ、所定条件下で、前記一のロボットに前記第二領域に位置する対象物を保持させる
請求項1に記載の保持システム。
【請求項8】
前記制御装置は、前記複数のロボットのうちの一のロボットに第一領域に位置する対象物を保持させ、他のロボットに第二領域に位置する対象物を保持させ、所定条件下で、前記一のロボットに、前記第一領域と前記第二領域との境界部分に位置する対象物を保持させる
請求項1に記載の保持システム。
【請求項9】
前記制御装置は、前記第一領域に残っている対象物の量、及び、前記第二領域に残っている対象物の量を検出する
請求項7または8に記載の保持システム。
【請求項10】
対象物の一部を保持及び解放する複数のロボットの動作を制御する制御装置であって、
前記複数のロボットのそれぞれに前記対象物の一部を保持させ、前記複数のロボットのうち、最も早く重量値が所定範囲内になった第一対象物を保持した第一ロボットに、前記第一対象物を解放させる
制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、保持システム及び制御装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、対象物を保持するロボットを備える保持システムが知られている。例えば、特許文献1(請求項9等)には、対象物を把持するロボットを備え、ロボットが把持した対象物が規定量に適合していない場合、対象物の物理量が所定量になると推定される深さを修正し、ロボットの把持部材を修正された深さまで差し込んで対象物を再度把持させる把持システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第7341550号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来の保持システムでは、目標量の対象物を保持するまでに時間がかかってしまうおそれがある。例えば、上記特許文献1では、ロボットが把持した対象物が規定量に適合するまで、ロボットの把持部材を修正された深さまで差し込んで対象物を再度把持させるため、目標量の対象物を把持するまでに時間がかかってしまうおそれがある。このように、保持システムにおいて、対象物を保持して解放する時間の短縮を図ることが望まれる。
【0005】
本発明は、本願発明者が上記課題に新たに着目することによってなされたものであり、対象物を保持して解放する時間の短縮を図ることができる保持システム及び制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る保持システムは、対象物の一部を保持及び解放する複数のロボットと、前記複数のロボットの動作を制御する制御装置と、を備え、前記制御装置は、前記複数のロボットのそれぞれに前記対象物の一部を保持させ、前記複数のロボットのうち、最も早く重量値が所定範囲内になった第一対象物を保持した第一ロボットに、前記第一対象物を解放させる。
【0007】
本発明の一態様に係る制御装置は、対象物の一部を保持及び解放する複数のロボットの動作を制御する制御装置であって、前記複数のロボットのそれぞれに前記対象物の一部を保持させ、前記複数のロボットのうち、最も早く重量値が所定範囲内になった第一対象物を保持した第一ロボットに、前記第一対象物を解放させる。
【発明の効果】
【0008】
本発明における保持システム等によれば、対象物を保持して解放する時間の短縮を図ることができる。
【図面の簡単な説明】
【0009】
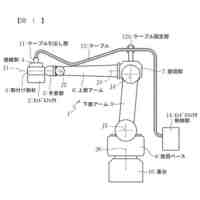
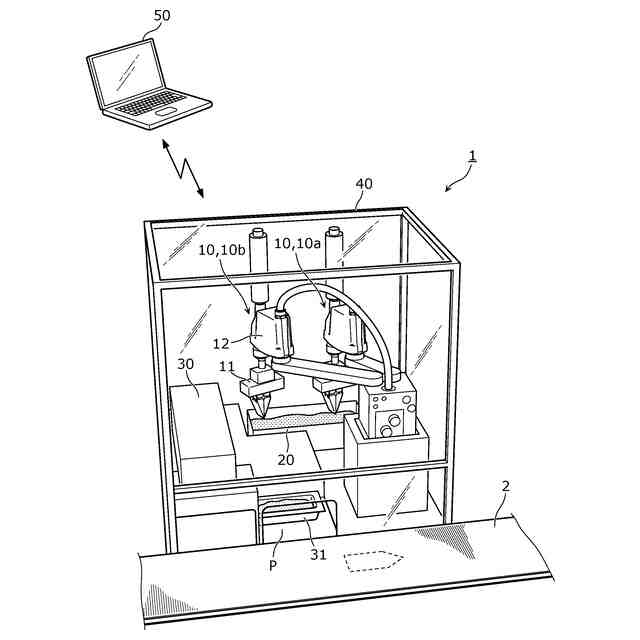
実施の形態に係る把持システムの外観を示す斜視図である。
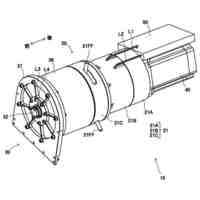
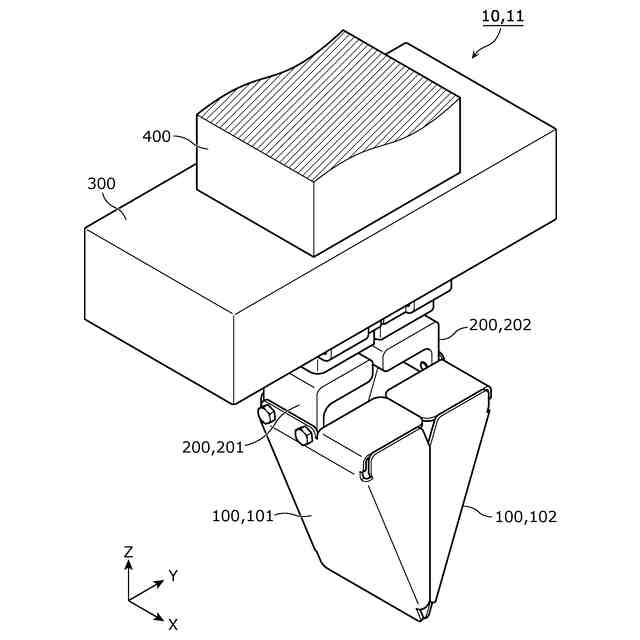
実施の形態に係るロボットのハンドの構成を示す斜視図である。
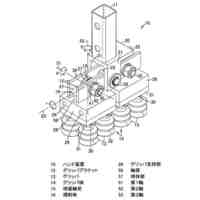
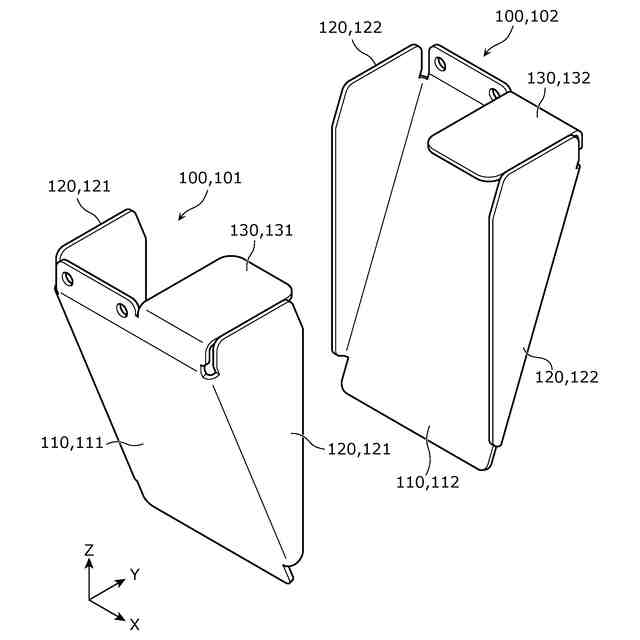
実施の形態に係るロボットのハンドが有する把持部材の構成を示す斜視図である。
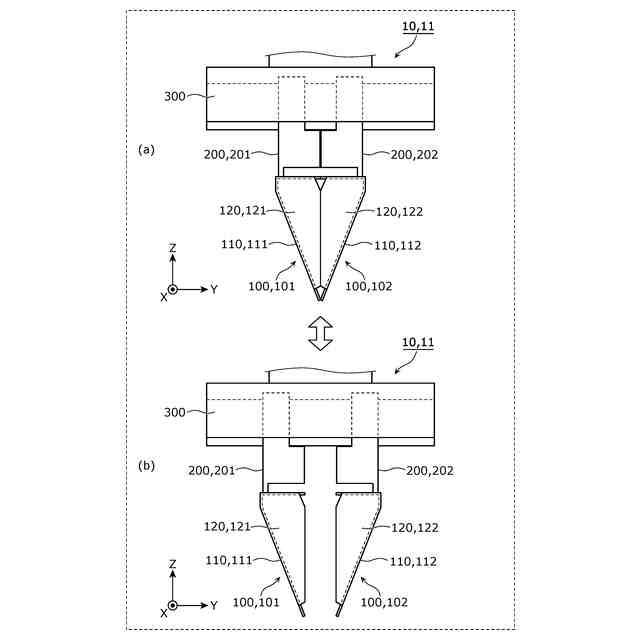
実施の形態に係るロボットのハンドが有する把持部材の開閉動作を示す正面図である。
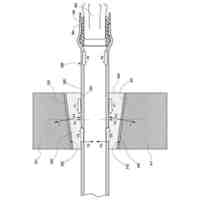
実施の形態に係るロボットのハンドが有する把持部材と対象物収容部とを示す模式図である。
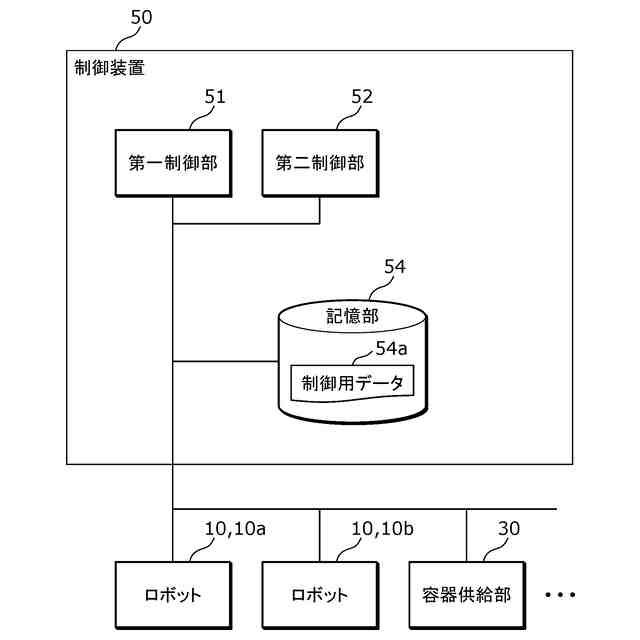
実施の形態に係る制御装置の機能的な構成を示すブロック図である。
実施の形態に係る制御装置がロボットの動作を制御する処理を示すフローチャートである。
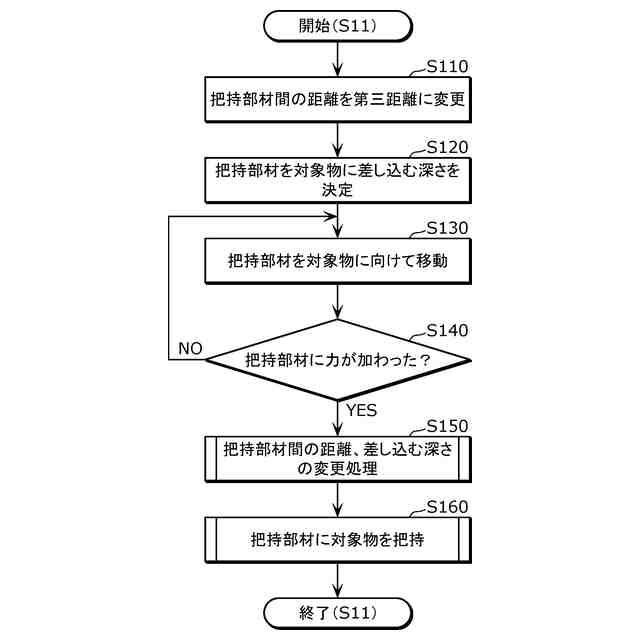
実施の形態に係る第一制御部がロボットに対象物の一部を把持させる処理を示すフローチャートである。
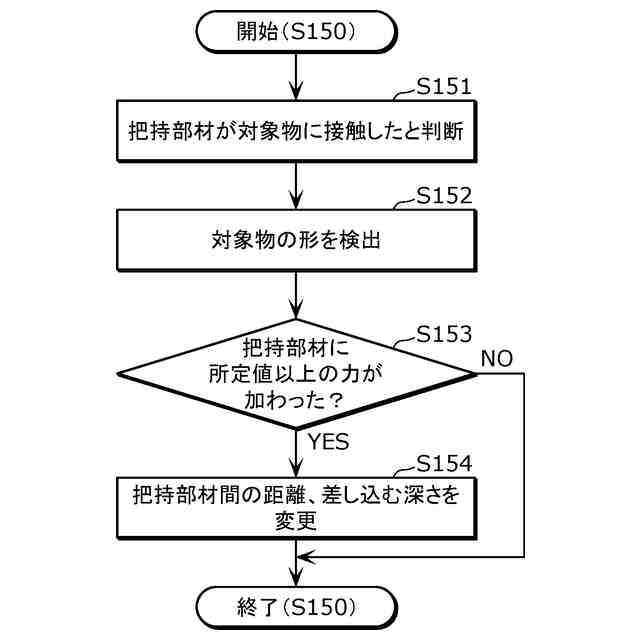
実施の形態に係る第一制御部が2つの把持部材の間の距離や把持部材を対象物に差し込む深さを変更する処理を示すフローチャートである。
実施の形態に係る第一制御部が2つの把持部材の間の距離や把持部材を対象物に差し込む深さを変更する処理を説明する模式図である。
実施の形態に係る第一制御部が2つの把持部材に対象物を把持させる処理を示すフローチャートである。
実施の形態に係る第一制御部が2つの把持部材に対象物を把持させる処理を説明する模式図である。
実施の形態に係る第一制御部が2つの把持部材に対象物を把持させる処理を説明する模式図である。
実施の形態に係る第一制御部が2つの把持部材に対象物を把持させる処理を説明する模式図である。
実施の形態に係る第一制御部が第一ロボットに第一対象物を解放させる処理を示すフローチャートである。
実施の形態に係る第一制御部が、第一ロボットが把持して解放した第一対象物の重量を調整する処理を示すフローチャートである。
実施の形態に係る第一制御部が、ロボットが対象物を把持する領域を決定する処理を示すフローチャートである。
実施の形態に係る第一制御部が第二ロボットに対象物の一部を再度把持させる処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
本発明の一態様に係る保持システムは、対象物の一部を保持及び解放する複数のロボットと、前記複数のロボットの動作を制御する制御装置と、を備え、前記制御装置は、前記複数のロボットのそれぞれに前記対象物の一部を保持させ、前記複数のロボットのうち、最も早く重量値が所定範囲内になった第一対象物を保持した第一ロボットに、前記第一対象物を解放させる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
20日前
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
関節機構
2か月前
住友重機械工業株式会社
教示装置
17日前
株式会社ダイヘン
搬送装置
24日前
個人
ペグハンマおよびペグハンマ用部品
24日前
東京都公立大学法人
対象物把持装置
2か月前
川崎重工業株式会社
ロボット
18日前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
17日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
17日前
学校法人五島育英会
アーム機構
2か月前
株式会社スター精機
吸着パッド
1か月前
住友重機械工業株式会社
支援装置
24日前
住友重機械工業株式会社
支援装置
24日前
株式会社PILLAR
チューブ保持治具
2か月前
アピュアン株式会社
衝撃工具
26日前
オークラ輸送機株式会社
ハンド装置
1か月前
ホシデン株式会社
分解用治具
24日前
株式会社マキタ
電気機器
18日前
株式会社スター精機
産業用ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
2か月前
株式会社リコー
多関節ロボット
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
20日前
工機ホールディングス株式会社
作業機
20日前
工機ホールディングス株式会社
作業機
20日前
工機ホールディングス株式会社
作業機
20日前
株式会社マキタ
電動作業機
2か月前
株式会社マキタ
電動作業機
2か月前
株式会社リコー
多関節ロボット
24日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ