TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025107779
公報種別
公開特許公報(A)
公開日
2025-07-22
出願番号
2024001212
出願日
2024-01-09
発明の名称
動物運搬車の制御システムおよび動物運搬車
出願人
株式会社SUBARU
代理人
弁理士法人つばさ国際特許事務所
主分類
B60P
3/04 20060101AFI20250714BHJP(車両一般)
要約
【課題】動物を運搬する際に動物に与える不快感を抑えることが可能な、動物運搬車の制御システム等を提供する。
【解決手段】本開示の一実施の形態に係る動物運搬車の制御システムは、複数の車輪を有する土台部と、この土台部内に配置されており、内部に動物を搭載するように構成された搭載部と、を有する荷台部を備えた動物運搬車の動作を制御するシステムであって、土台部と搭載部との間に配置されており、土台部を基準とした搭載部の位置および角度をそれぞれ調整するように構成された調整機構と、搭載部のヨー角加速度を検知するように構成された検知部と、この検知部によって検知された搭載部のヨー角加速度の増加に伴う、搭載部内の動物の挙動特性に応じて、調整機構の調整動作を制御するように構成された制御部と、を備えている。
【選択図】図1
特許請求の範囲
【請求項1】
複数の車輪を有する土台部と、前記土台部内に配置されており、内部に動物を搭載するように構成された搭載部と、を有する荷台部を備えた動物運搬車の動作を制御するシステムであって、
前記土台部と前記搭載部との間に配置されており、前記土台部を基準とした前記搭載部の位置および角度をそれぞれ調整するように構成された調整機構と、
前記搭載部のヨー角加速度を検知するように構成された検知部と、
前記検知部によって検知された前記搭載部のヨー角加速度の増加に伴う、前記搭載部内の前記動物の挙動特性に応じて、前記調整機構の調整動作を制御するように構成された制御部と
を備えた動物運搬車の制御システム。
続きを表示(約 1,000 文字)
【請求項2】
前記制御部は、前記搭載部のヨー角加速度が所定の閾値を超えないように、前記調整機構の調整動作を制御するように構成されており、
前記所定の閾値は、前記搭載部のヨー角加速度の増加に伴って、前記搭載部内の前記動物の頭部が、前記搭載部のヨー角加速度を打ち消す方向へと動き始める状態に相当する、前記搭載部のヨー角加速度の値である
請求項1に記載の動物運搬車の制御システム。
【請求項3】
前記検知部は、更に、前記搭載部における、前記動物運搬車の車幅方向に対応する横方向への加速度と、前記動物運搬車の進行方向に対応する前後方向への加速度と、のうちの少なくとも一方を検知するように構成されており、
前記制御部は、前記横方向または前記前後方向に沿って前記搭載部が傾斜するように前記調整機構の調整動作を制御することにより、前記横方向または前記前後方向への前記動物の体感加速度を低減させるように構成されている
請求項1または請求項2に記載の動物運搬車の制御システム。
【請求項4】
前記制御部は、
前記横方向または前記前後方向への加速度の発生が予測される場合には、
前記横方向または前記前後方向に沿って前記搭載部を傾斜させる前に、
前記横方向または前記前後方向に沿って、前記搭載部を一旦逆側に傾斜させておくように構成されている
請求項3に記載の動物運搬車の制御システム。
【請求項5】
動物を運搬する動物運搬車であって、
複数の車輪を有する土台部と、前記土台部内に配置されており、内部に前記動物を搭載するように構成された搭載部と、を有する荷台部と、
前記動物運搬車の動作を制御するように構成された制御システムと
を備え、
前記制御システムは、
前記土台部と前記搭載部との間に配置されており、前記土台部を基準とした前記搭載部の位置および角度をそれぞれ調整するように構成された調整機構と、
前記搭載部のヨー角加速度を検知するように構成された検知部と、
前記検知部によって検知された前記搭載部のヨー角加速度の増加に伴う、前記搭載部内の前記動物の挙動特性に応じて、前記調整機構の調整動作を制御するように構成された制御部と
を有する動物運搬車。
発明の詳細な説明
【技術分野】
【0001】
本開示は、動物運搬車の制御システムおよび動物運搬車に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
動物運搬車の制御システムとして、各種の技術が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2005-199790号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような動物運搬車の制御システムでは、例えば、動物を運搬する際に、動物に与える不快感を抑えることが求められている。動物を運搬する際に動物に与える不快感を抑えることが可能な、動物運搬車の制御システムおよび動物運搬車を提供することが望ましい。
【課題を解決するための手段】
【0005】
本開示の一実施の形態に係る動物運搬車の制御システムは、複数の車輪を有する土台部と、この土台部内に配置されており、内部に動物を搭載するように構成された搭載部と、を有する荷台部を備えた動物運搬車の動作を制御するシステムであって、土台部と搭載部との間に配置されており、土台部を基準とした搭載部の位置および角度をそれぞれ調整するように構成された調整機構と、搭載部のヨー角加速度を検知するように構成された検知部と、この検知部によって検知された搭載部のヨー角加速度の増加に伴う、搭載部内の動物の挙動特性に応じて、調整機構の調整動作を制御するように構成された制御部と、を備えたものである。
【0006】
本開示の一実施の形態に係る動物運搬車は、動物を運搬する動物運搬車であって、複数の車輪を有する土台部と、この土台部内に配置されており、内部に動物を搭載するように構成された搭載部と、を有する荷台部と、この動物運搬車の動作を制御するように構成された制御システムと、を備えたものである。この制御システムは、土台部と搭載部との間に配置されており、土台部を基準とした搭載部の位置および角度をそれぞれ調整するように構成された調整機構と、搭載部のヨー角加速度を検知するように構成された検知部と、この検知部によって検知された搭載部のヨー角加速度の増加に伴う、搭載部内の動物の挙動特性に応じて、調整機構の調整動作を制御するように構成された制御部と、を有している。
【図面の簡単な説明】
【0007】
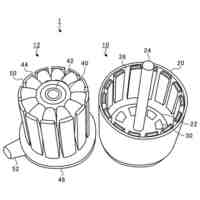
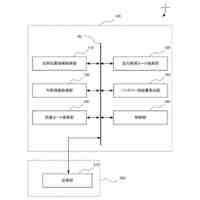
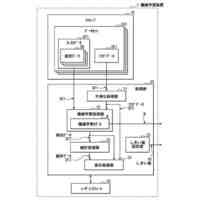
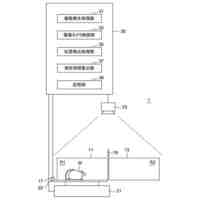
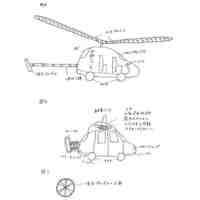
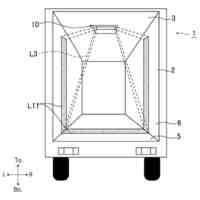
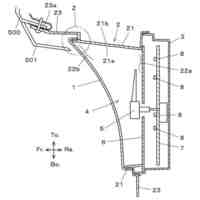
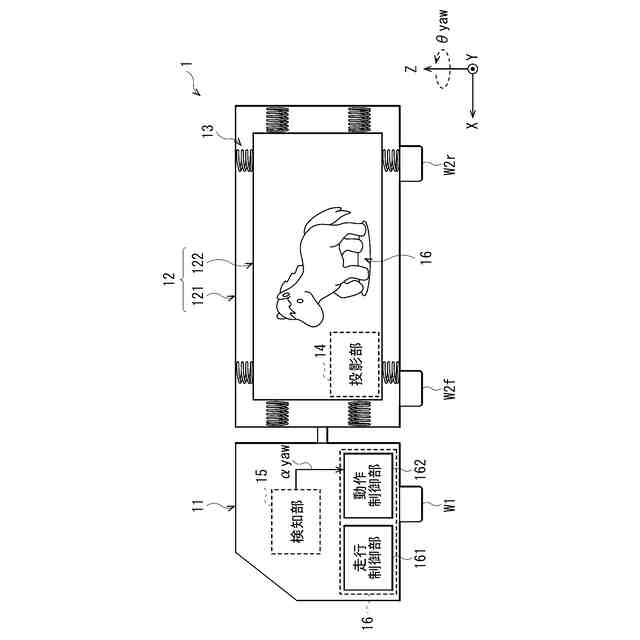
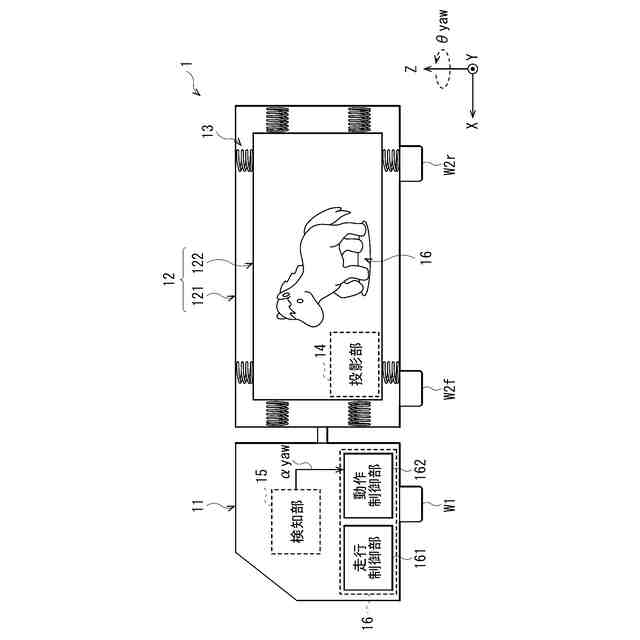
図1は、本開示の一実施の形態に係る動物運搬車の概略構成例を模式的に表すブロック図である。
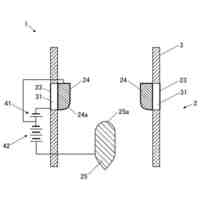
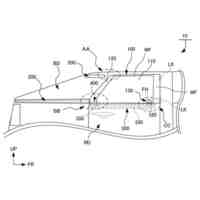
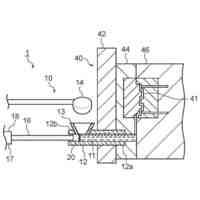
図2は、図1に示した動物運搬車における運転開始前の状態例を表す模式図である。
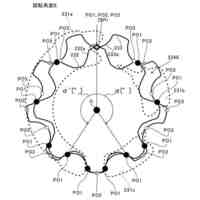
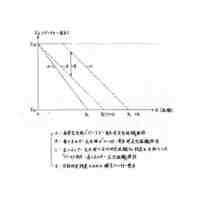
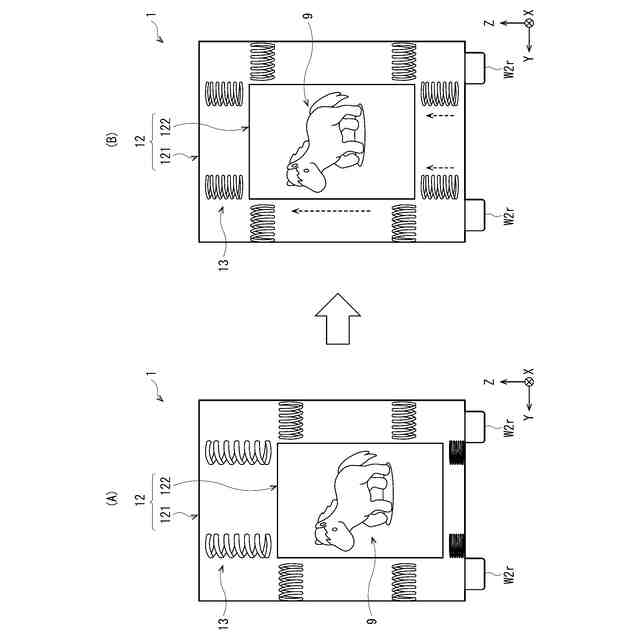
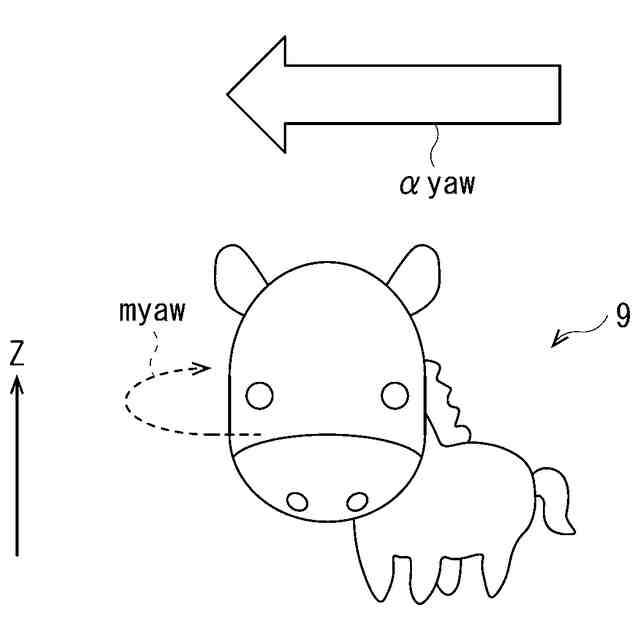
図3は、搭載部のヨー角加速度の増加に伴う動物の挙動特性例を表す模式図である。
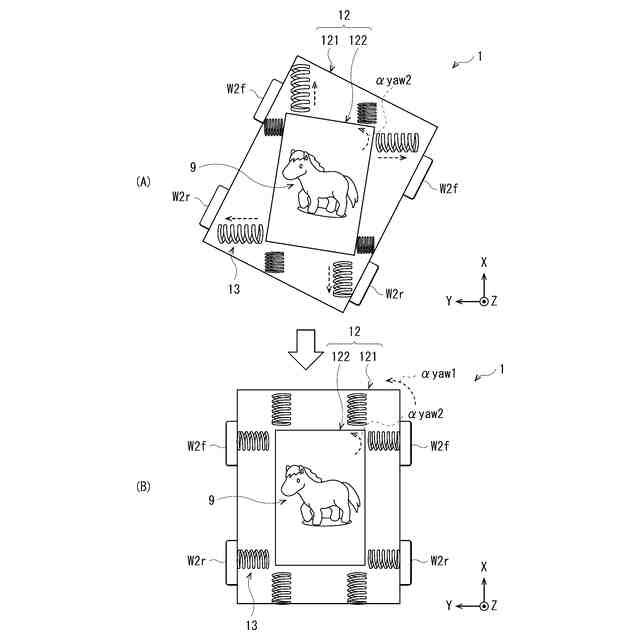
図4は、図3に示した動物の挙動特性例に応じた調整動作の制御例を表す模式図である。
図5は、図4に示した調整機構の調整状態から初期状態へと戻す際の制御例を表す模式図である。
図6は、動物の視線変化に応じた投影部の動作制御例を表す模式図である。
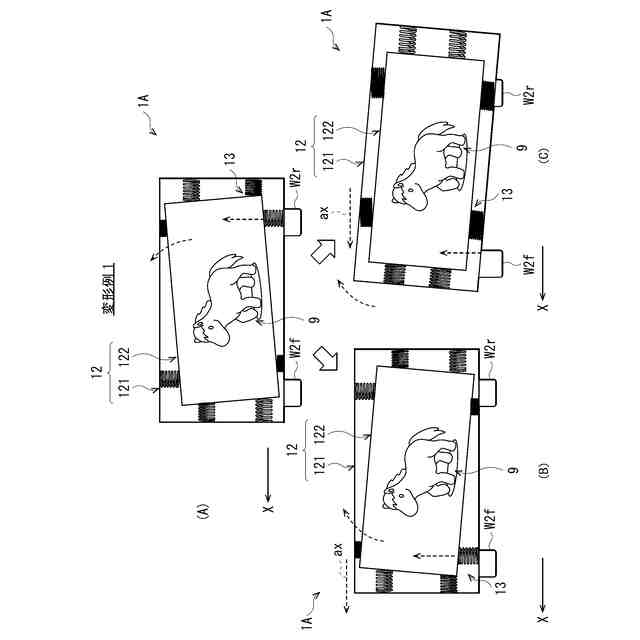
図7は、変形例1に係る調整動作の制御例を表す模式図である。
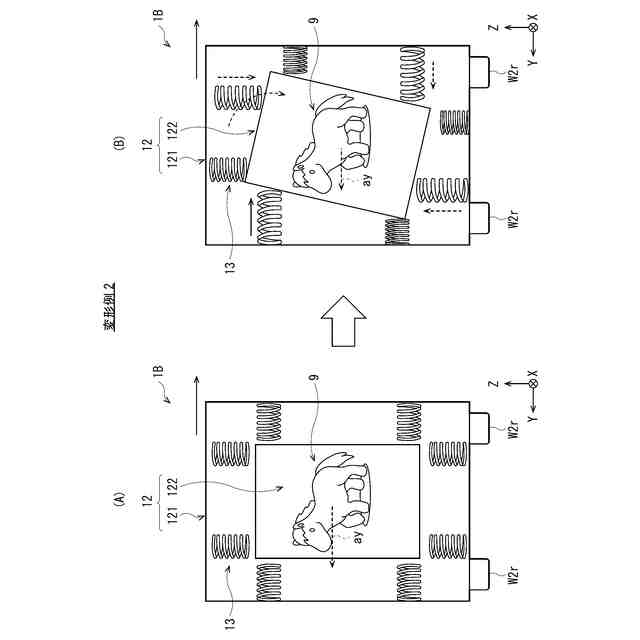
図8は、変形例2に係る調整動作の制御例を表す模式図である。
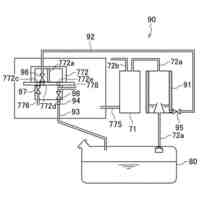
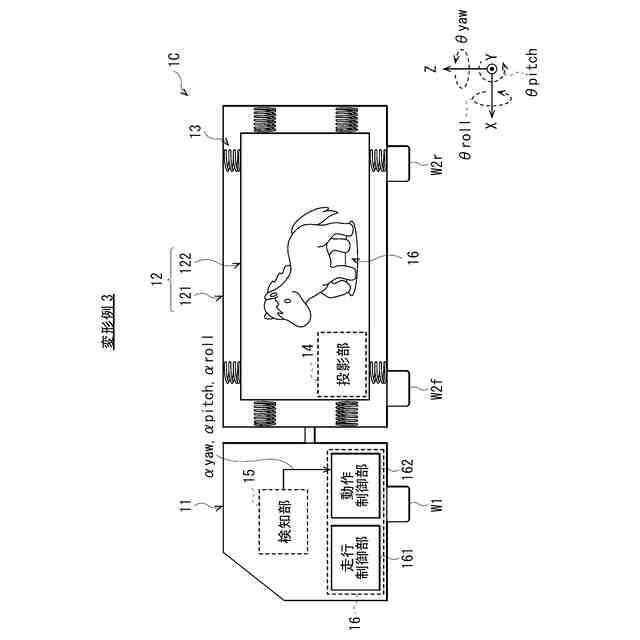
図9は、変形例3に係る動物運搬車の概略構成例を模式的に表すブロック図である。
【発明を実施するための形態】
【0008】
以下、本開示の実施の形態について、図面を参照して詳細に説明する。なお、説明は以下の順序で行う。
1.実施の形態(ヨー角加速度の検知結果に基づいて調整機構の動作制御を行う例)
2.変形例
変形例1(動物運搬車の前後方向への加速度に応じた調整機構の動作制御例)
変形例2(動物運搬車の横方向への加速度に応じた調整機構の動作制御例)
変形例3(ピッチ角加速度およびロール角加速度の検知結果も用いた動作制御例)
3.その他の変形例
【0009】
<1.実施の形態>
[構成]
図1は、本開示の一実施の形態に係る動物運搬車(動物運搬車1)の概略構成例を、模式的にブロック図で表したものである。この動物運搬車1は、後述する荷台部12内に搭載された動物9を運搬する車両である。なお、この動物9としては、例えば図1に示した馬の他、各種の動物が挙げられ、人間も含むようにしてもよい。
【0010】
動物運搬車1は、図1に示したように、車両本体部11、荷台部12、調整機構13、投影部14、検知部15および車両制御部16を、備えている。なお、以下では、例えば図1に示したように、動物運搬車1の進行方向(前後方向)をX軸、動物運搬車1の車幅方向(横方向)をY軸、動物運搬車1の高さ方向をZ軸として、それぞれ規定すると共に、このZ軸を中心軸とするヨー角θyawを規定しているものとする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社SUBARU
車両
1日前
株式会社SUBARU
モータ
8日前
株式会社SUBARU
解析装置
7日前
株式会社SUBARU
エアバッグ装置
6日前
株式会社SUBARU
イオン風発生装置
5日前
株式会社SUBARU
ポンプの固着防止装置
7日前
株式会社SUBARU
車両用サイドガラス装置
6日前
株式会社SUBARU
車両用ナビゲーション装置
6日前
株式会社SUBARU
機械学習装置および機械学習方法
1日前
株式会社SUBARU
蒸発燃料処理システムの診断装置
12日前
株式会社SUBARU
評価方法、情報処理装置及び評価システム
1日前
株式会社SUBARU
動物運搬車の制御システムおよび動物運搬車
8日前
株式会社SUBARU
ダイカスト用のプランジャチップ及び射出装置
5日前
株式会社SUBARU
情報処理装置及び情報処理方法並びにプログラム
5日前
株式会社SUBARU
スクラップシュートの設計支援方法及びスクラップシュートの設計支援装置
5日前
個人
カーテント
1か月前
個人
飛行自動車
5か月前
個人
タイヤレバー
今日
個人
車窓用防虫網戸
2か月前
個人
警告装置
3か月前
個人
小型EVシステム
3か月前
個人
車輪清掃装置
2か月前
個人
ホイルのボルト締結
29日前
日本精機株式会社
ケース
3か月前
日本精機株式会社
表示装置
4か月前
個人
アンチロール制御装置
4か月前
個人
車両通過構造物
1日前
日本精機株式会社
表示装置
4か月前
個人
キャンピングトライク
1か月前
日本精機株式会社
照明装置
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ