TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025110109
公報種別
公開特許公報(A)
公開日
2025-07-28
出願番号
2024003848
出願日
2024-01-15
発明の名称
線状物供給装置および線状物取上方法
出願人
倉敷紡績株式会社
代理人
個人
主分類
B25J
13/08 20060101AFI20250718BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】細く柔軟で変形しやすい線状物の束から1本の線状物を取り上げるための線状物供給装置を提供する。
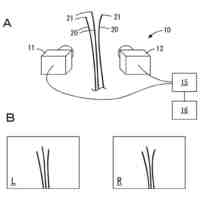
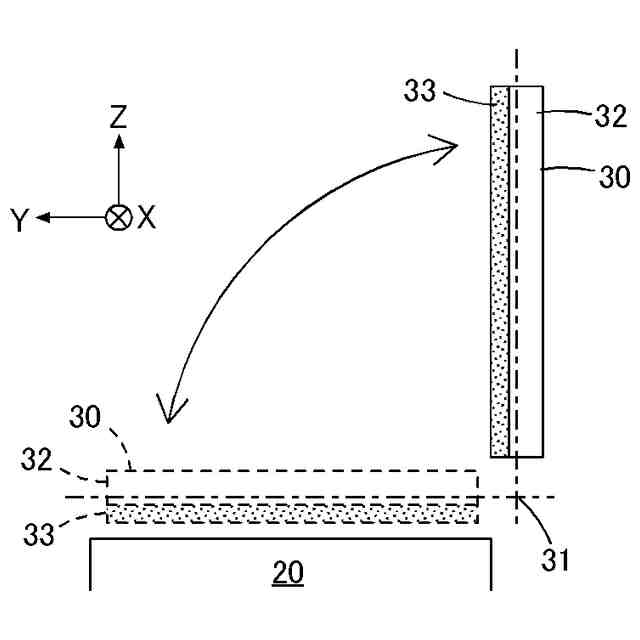
【解決手段】線状物の束から前記線状物の1本を取り上げるために用いる線状物供給装置であって、前記束を載置するためのテーブル20と、前記テーブルの上方に配置され、前記テーブル上に載置される前記束の長手方向の2か所以上で、前記束の幅方向に走査可能な変位センサ60とを有する線状物供給装置10。
【選択図】図1
特許請求の範囲
【請求項1】
線状物の束から前記線状物の1本を取り上げるために用いる線状物供給装置であって、
前記束を載置するためのテーブルと、
前記テーブルの上方に配置され、前記テーブル上に載置される前記束の長手方向の2か所以上で、前記束の幅方向に走査可能な変位センサと、
を有する線状物供給装置。
続きを表示(約 280 文字)
【請求項2】
テーブル上に線状物の束を載置する載置工程と、
前記束の長手方向の2か所以上で前記束の幅方向に変位センサを走査し、走査した領域で最も高い位置にある前記線状物を被選定線状物として選定するとともに、前記走査した領域における前記被選定線状物の位置および向きを算出する工程と、
ロボットハンドの位置および姿勢を前記被選定線状物の位置および向きに合わせて、前記ロボットハンドで前記被選定線状物を把持する工程と、
前記ロボットハンドを移動させて前記被選定線状物を前記束から分離して抜き取る工程と、
を有する線状物取上方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンド等に線状物を供給するための装置に関し、より詳細には、細く柔軟な線状物の束をロボットハンド等に供給する装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
細く柔軟で変形しやすい線状物を対象とする様々な作業において、ロボットを用いて線状物のハンドリングを自動化することが行われている。例えば、電線等のケーブル、光ファイバ、細径の各種チューブ類を対象として、端子の圧着、コネクタ等部品の締結、半田付け、溶着、接続などの加工を行う際にワークとなる線状物をロボットハンドで把持して、目標となる加工装置や検査装置まで移送してセットすることが行われている。このとき、多数の線状物が束状にして供給される場合は、ロボットハンドはまず、供給された多数の線状物の中から1本の線状物を把持する必要がある。
【0003】
特許文献1には、柔軟で形状が定まらない複数の線状物の3次元形状を計測し、そのうちの1本を他の線状物と干渉しないでロボットハンドで把持可能かを判定して、把持する装置が開示されている。
【0004】
特許文献2には、鋼管等のワークを山積みし、山積みされたワーク群の一端側に沿って幅方向にレーザー位置センサーで走査して、最も高い位置にあるワークの一端の座標を決定し、当該一端を押し部材で他端側に押すことが記載されている。他端側に押されたワークは、他端を他のワーク群から突出させて第2ロボットで掴み、第2ロボットを上昇させて一端側に押し戻し、一端を他のワーク群から突出させて第1ロボットで掴み、第1および第2ロボットで持ち上げて移送する。特許文献3には、トレイ内にアスパラガス、長ネギなどの長尺農作物を積層し、農作物を横切る方向に何らかのセンサを走査して、最も高い位置にあるものの位置情報を検出して、吸着器で吸着して計量機に移動する装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
国際公開第2019/098074号
特開2019-116342号公報
特開2016-132530号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、線状物の数が例えば数十本あるいは数百本と増えると、特許文献1に記載された方法では3次元形状の計測のための計算負荷が重くなるという問題があった。
【0007】
一方、特許文献2および3に記載された装置では、センサで1回の走査を行い、ワーク上の1点の位置座標を決定して、押し部材で押す、または吸着器で吸着するので、計算負荷は軽い。しかし、特許文献2は鋼管等、特許文献3はアスパラガス等の農作物を想定しているのに対して、例えば、ワイヤハーネスに使用される電線等を、1点の位置情報だけに基づいてロボットハンドで把持することは難しい。変形による曲がりが、径に対して、相対的に大きくなるからである。
【0008】
本発明は、上記を考慮してなされたものであり、細く柔軟であるために変形しやすい線状物の束からロボットハンドで1本の線状物を取り上げるときにも、計算負荷が軽く、確実に取り上げることができる線状物供給装置を提供することを目的とする。また、併せて、係る線状物供給装置を利用した線状物取上方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題に対して、本発明では、線状物の束の長さ方向の2か所以上で、束の幅方向にレーザ変位計で走査する。
【0010】
具体的には、本発明の線状物供給装置は、線状物の束から前記線状物の1本を取り上げるために用いる線状物供給装置であって、前記束を載置するためのテーブルと、前記テーブルの上方に配置され、前記テーブル上に載置される前記束の長手方向の2か所以上で、前記束の幅方向に走査可能な変位センサとを有する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
倉敷紡績株式会社
線状物の3次元計測方法
今日
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
14日前
倉敷紡績株式会社
詰め物用糸及びこれを含む中綿構造体
今日
倉敷紡績株式会社
清涼性混紡紡績糸及びこれを用いた清涼性生地
1か月前
倉敷紡績株式会社
機能性混紡紡績糸及びこれを用いた機能性生地
1か月前
倉敷紡績株式会社
セルロース系グラフト繊維、これを含む繊維構造体及びその製造方法
22日前
倉敷紡績株式会社
コネクタ接続システム、リード線制御装置、コネクタ接続方法およびリード線移動方法
14日前
個人
固定補助具
1か月前
個人
折りたたみ工具
25日前
株式会社三協システム
製函機
23日前
川崎重工業株式会社
ロボット
2日前
株式会社不二越
ロボット
1日前
株式会社竹中工務店
補助セット
1日前
株式会社三協システム
移載装置
22日前
CKD株式会社
把持装置
24日前
株式会社不二越
ロボット操作装置
1か月前
株式会社不二越
ロボットシステム
1か月前
SMC株式会社
着脱装置
23日前
太陽パーツ株式会社
アシストスーツ
25日前
日本精工株式会社
締結用工具
1か月前
株式会社ミクロブ
把持装置
24日前
ARMA株式会社
ジョイントフレーム
1か月前
株式会社不二越
移動ロボットシステム
4日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
エッジ仕上げ装置
14日前
株式会社不二越
ロボットシステム
22日前
本田技研工業株式会社
装置
7日前
株式会社不二越
ロボットシステム
25日前
積水ハウス株式会社
フィルム除去具
1か月前
株式会社不二越
垂直多関節ロボット
15日前
トヨタ自動車株式会社
歩行ロボット
28日前
大和ハウス工業株式会社
ねじ回転工具
23日前
アネックスツール株式会社
ドライバービット
今日
ライオン株式会社
移載システム
16日前
ダイハツ工業株式会社
移載治具
1か月前
シンフォニアテクノロジー株式会社
搬送装置
4日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ