TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025111369
公報種別
公開特許公報(A)
公開日
2025-07-30
出願番号
2024184241
出願日
2024-10-18
発明の名称
把持システム、及び把持部材
出願人
コネクテッドロボティクス株式会社
代理人
個人
,
個人
主分類
B25J
13/00 20060101AFI20250723BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数の把持部材が把持をする場合に生じてしまう問題を、より抑制する。
【解決手段】把持システム1は、複数の把持部材313と、ロボットアーム32と、制御部311と、を備える。複数の把持部材313は、それぞれが独立して具材を把持する。ロボットアーム32は、複数の把持部材313を移送して、具材の群を収容すると共にその底面が略水平な具材収容部10に対して、複数の把持部材313を同時に差し込む。制御部311は、具材収容部10に差し込まれた状態で、複数の把持部材313に把持を実行させる。複数の把持部材313の先端は、それぞれロボットアーム32との相対的な距離が異なることから、把持を実行する際の具材収容部10の底面との相対的な距離もそれぞれ異なる。
【選択図】図5
特許請求の範囲
【請求項1】
それぞれが独立して対象物を把持する複数の把持部材と、
前記複数の把持部材を移送して、前記対象物の群を収容すると共にその底面が略水平な容器に対して、前記複数の把持部材を同時に差し込む移送手段と、
前記容器に差し込まれた状態で、前記複数の把持部材に把持を実行させる制御手段と、
を備え、
前記複数の把持部材の先端は、それぞれ前記移送手段との相対的な距離が異なることから、前記把持を実行する際の前記容器の底面との相対的な距離もそれぞれ異なる、
ことを特徴とする把持システム。
続きを表示(約 1,200 文字)
【請求項2】
前記複数の把持部材のそれぞれについて、把持部材が把持している対象物の重量を検出する重量検出手段をさらに備え、
前記制御手段は、前記重量検出手段の検出した重量に基づいて、把持部材が把持している重量の組み合わせ計量を行うと共に、該計量結果に基づいて、対象物を解放する把持部材を決定する、
ことを特徴とする請求項1に記載の把持システム。
【請求項3】
前記複数の把持部材それぞれの先端は、前記移送手段に配置されている方向において、前記移送手段との相対的な距離が段階的に異なる、
ことを特徴とする請求項1または2に記載の把持システム。
【請求項4】
前記複数の把持部材それぞれの先端は、隣接している他の把持部材とは、前記移送手段との相対的な距離が異なる、
ことを特徴とする請求項1または2に記載の把持システム。
【請求項5】
前記把持部材が把持を実行する際に、前記容器の壁面に隣接する把持部材の先端が、他の把持部材の先端よりも前記容器の底面との相対的な距離がもっとも近い、
ことを特徴とする請求項1または2に記載の把持システム。
【請求項6】
前記複数の把持部材の少なくとも何れかについて、前記差し込む過程で前記対象物から反力を受けたことを検出する反力検出手段をさらに備え、
前記制御手段は、前記反力検出手段が検出した反力の物理量が基準以上になったことに応じて、対応する把持部材に把持を実行させると共に、前記複数の把持部材により、前記基準を異ならせる、
ことを特徴とする請求項1または2に記載の把持システム。
【請求項7】
前記制御手段は、前記複数の把持部材の先端が前記容器の底面との相対的な距離がそれぞれ異なる状態で、同時に前記複数の把持部材に把持を実行させる、
ことを特徴とする請求項1または2に記載の把持システム。
【請求項8】
前記複数の把持部材のそれぞれは、開閉することにより把持を実行する一対の把持部材であり、
前記制御手段は、水平面において前記開閉する方向が前記容器の壁面の方向と略平行又は略直交となるようにして、前記複数の把持部材に把持を実行させる、
ことを特徴とする請求項1または2に記載の把持システム。
【請求項9】
他の把持部材とは独立して対象物を把持する把持部材であって、
移送手段により移送されることにより、前記対象物の群を収容すると共にその底面が略水平な容器に対して、前記他の把持部材と同時に差し込まれ、
前記容器に差し込まれた状態で、把持を実行すると共に、
当該把持部材の先端と、前記他の把持部材の先端とは前記移送手段との相対的な距離が異なることから、前記把持を実行する際の前記容器の底面との相対的な距離も前記他の把持部材と異なる、
ことを特徴とする把持部材。
発明の詳細な説明
【技術分野】
【0001】
本発明は、把持システム、及び把持部材に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
近年、把持機能を備えたロボットにより、様々な作業が行われている。例えば、食品を把持する場合、バット等の収容容器に収容された食品をロボットが所定量把持し、解放先となる容器や排出シュートまで移送してから、解放を実行するという作業が実現される。
このような、把持機能を備えたロボットに関する技術は、例えば、特許文献1に開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第7161207号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1には、1つのロボットアームに複数の把持部材を配置して同時に下降させ、それぞれが把持を行うことが開示されている。しかしながら、このような場合、隣接する把持部材が、同一の対象物を同時に把持してしまうことがありえる。典型的には、長さのある対象物(例えば、1本の麺類や、1本のもやし等)を2つの把持部材で同時に把持してしまうことがありえる。
それにより、それぞれの把持部材が把持している重量が不明確となったり、何れの把持部材を解放すれば、この対象物が解放されるのかが不明確となったりする。このような状態は、把持部材の制御を行うにあたって好ましい状態とは言えない。
【0005】
以上のように、従来の技術では、複数の把持部材により把持をするにあたって、未だ改善の余地があった。また、このような課題は、把持の対象物が食品である場合に限られるものではなく、工業分野等の、ロボットによる把持を行う様々な分野全般に共通するものである。
【0006】
本発明の課題は、複数の把持部材が把持をする場合に生じてしまう問題を、より抑制することである。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の一実施形態に係る把持システムは、
それぞれが独立して対象物を把持する複数の把持部材と、
前記複数の把持部材を移送して、前記対象物の群を収容すると共にその底面が略水平な容器に対して、前記複数の把持部材を同時に差し込む移送手段と、
前記容器に差し込まれた状態で、前記複数の把持部材に把持を実行させる制御手段と、
を備え、
前記複数の把持部材の先端は、それぞれ前記移送手段との相対的な距離が異なることから、前記把持を実行する際の前記容器の底面との相対的な距離もそれぞれ異なる、
ことを特徴とする。
【発明の効果】
【0008】
本発明によれば、複数の把持部材が把持をする場合に生じてしまう問題を、より抑制することができる。
【図面の簡単な説明】
【0009】
本発明に係る把持システム1の構成を模式的に示す模式図である。
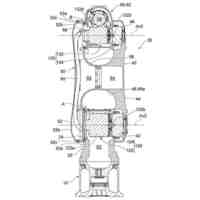
把持部材が開いている状態の把持機構31の構成を示す正面図である。
把持部材が閉じている状態の把持機構31の構成を示す正面図である。
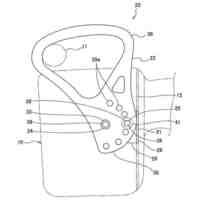
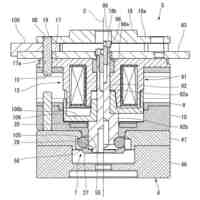
把持機構31の内部構成を示す正面図である。
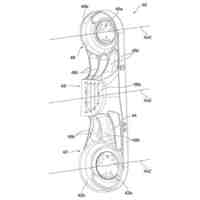
複数の把持機構31の配置を示す側面図である。
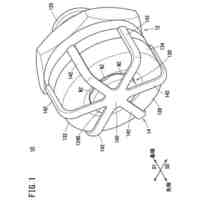
複数の把持機構31の配置を示す底面図である。
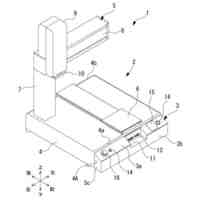
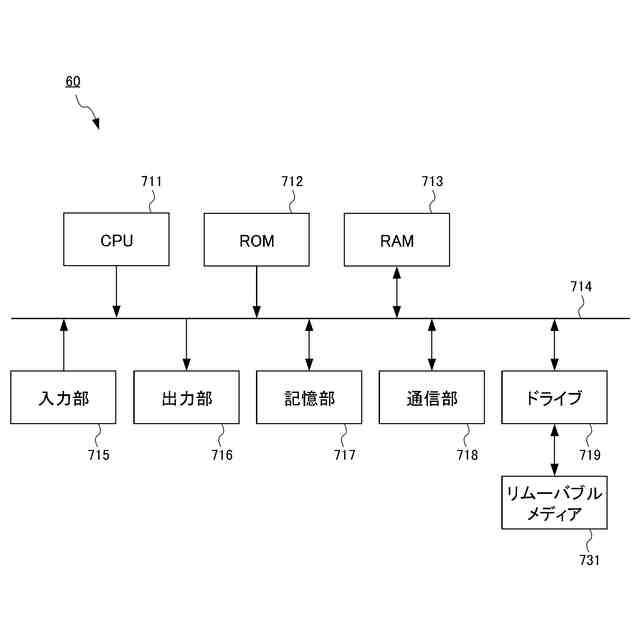
制御装置60のハードウェア構成を示す模式図である。
制御装置60の機能的構成を示すブロック図である。
把持動作が行われる場合の、具材収容部10及び複数の把持機構31の位置関係について示す図である。
把持動作が行われる場合の、具材収容部10及び複数の把持機構31の位置関係について示す図である。
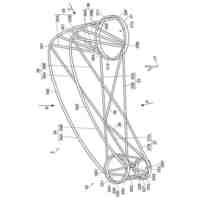
多関節ロボット30が実行する把持及び解放動作の状況を示す模式図である。
多関節ロボット30が実行する把持及び解放動作の状況を示す模式図である。
多関節ロボット30が実行する把持及び解放動作の状況を示す模式図である。
把持システム1が実行する具材盛り付け処理の流れを示すフローチャートである。
把持システム1が実行する具材盛り付け処理の流れを示すフローチャートである。
第1把持部313aと第2把持部313bを変形した形状の一例を示す図である。
第1把持部313aと第2把持部313bを変形した形状の、他の一例を示す図である。
各把持機構31の配置の一例を示す図である。
各把持機構31の配置の一例を示す図である。
各把持機構31の配置の一例を示す図であって、図6と同様に複数の把持機構31を底面から見た状態を示す。
水平面における具材収容部10と、複数の把持部材313との位置関係について示す図である。
変形例5の把持システム1が実行する具材盛り付け処理の流れを示すフローチャートである。
変形例7における、把持機構31の構成を示す図である。
変形例7における、把持機構31の内部構成を示す模式図である。
変形例7における、支持部317の弾性体による作用について説明する模式図である。
変形例7における、伝達部312及び把持部材313の着脱構成について示す斜視図である。
変形例7における、伝達部312及び把持部材313の着脱時に行われる、着脱支援動作について示す模式図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について、図面を参照して説明する。
[実施形態]
[全体構成]
図1は、本発明に係る把持システム1の構成を模式的に示す模式図である。
ここで、把持システム1は、食品を対象物として把持や解放を行うシステムに本発明を適用することを想定したものである。そのため、以下の説明においては、把持システム1が惣菜等の具材を把持し、この把持した具材を、排出シュートを介して容器に盛り付ける場合を例に挙げて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
住友重機械工業株式会社
教示装置
28日前
個人
ペグハンマおよびペグハンマ用部品
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
29日前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
28日前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
28日前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
積水ハウス株式会社
フィルム除去具
1日前
ホシデン株式会社
分解用治具
1か月前
アピュアン株式会社
衝撃工具
1か月前
株式会社スター精機
産業用ロボット
2か月前
株式会社マキタ
電気機器
29日前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社不二越
協働ロボットシステム
6日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社清水製作所
電動工具の吊下げ具
10日前
株式会社ジャノメ
ロボット
1か月前
株式会社安川電機
ロボット
2か月前
株式会社安川電機
ロボット
2か月前
株式会社安川電機
ロボット
2か月前
セイコーエプソン株式会社
ロボット
2か月前
小倉クラッチ株式会社
ロボット用ツール交換装置
2か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ