TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025112625
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024006966
出願日
2024-01-19
発明の名称
ロボット
出願人
ソフトバンクグループ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B25J
5/00 20060101AFI20250725BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】不審対象を追跡すること。
【解決手段】実施形態に係るロボットは、自律走行可能なロボット本体と、ロボット本体の周囲の状況を検出する検出部と、検出部によって検出された状況に応じてロボット本体を自律走行させる制御部とを備える。ロボット本体は、胴体部と、1つの脚部と、ロボット本体を移動させる移動部とを備える。ロボット本体は、脚部の上端に位置する腰部の関節、脚部の下端に位置する足首部、及び腰部と足首部との間に位置する膝部の関節を少なくとも有する。脚部は、腰部において胴体部に可動可能に取り付けられ、足首部において移動部に可動可能に取り付けられている。移動部には、ローラーが設けられている。
【選択図】図2
特許請求の範囲
【請求項1】
自律走行可能なロボット本体と、
前記ロボット本体の周囲の状況を検出する検出部と、
前記検出部によって検出された状況に応じて前記ロボット本体を自律走行させる制御部と
を備え、
前記ロボット本体は、
胴体部と、
1つの脚部と、
前記ロボット本体を移動させる移動部と
を備え、
前記脚部の上端に位置する腰部の関節、前記脚部の下端に位置する足首部の関節、及び前記腰部と前記足首部との間に位置する膝部の関節を少なくとも有し、
前記脚部は、前記腰部において前記胴体部に可動可能に取り付けられ、前記足首部において前記移動部に可動可能に取り付けられ、
前記移動部には、ローラーが設けられている、ロボット。
続きを表示(約 100 文字)
【請求項2】
前記移動部は、無人搬送車である、請求項1に記載のロボット。
【請求項3】
前記ロボット本体には、取り外し可能な箱部が取り付けられている、請求項1又は2に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
開示の実施形態は、ロボットに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、車両に危害が加えられた場合に、車両からドローンを離陸させて、車両、及び、車両の周囲を、ドローンに設けたカメラによって撮影するシステムが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-93618号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術では、例えば、不審対象が検出され、不審対象が逃げた場合に、不審対象を追跡することができない、といった問題点がある。
【0005】
本発明は、上記に鑑みてなされたものであって、不審対象を追跡することを目的とする。
【課題を解決するための手段】
【0006】
実施形態の一態様に係るロボットは、自律走行可能なロボット本体と、ロボット本体の周囲の状況を検出する検出部と、検出部によって検出された状況に応じてロボット本体を自律走行させる制御部とを備える。ロボット本体は、胴体部と、1つの脚部と、移動部とを備える。ロボット本体は、脚部の上端に位置する腰部の関節、脚部の下端に位置する足首部の関節、及び腰部と足首部との間に位置する膝部の関節を少なくとも有する。脚部は、腰部において胴体部に可動可能に取り付けられ、足首部において移動部に可動可能に取り付けられている。移動部には、ローラーが設けられている。
【発明の効果】
【0007】
実施形態の一態様によれば、不審対象を追跡することができる。
【図面の簡単な説明】
【0008】
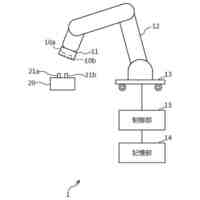
図1は、実施形態に係る追跡システムの概略を示す図である。
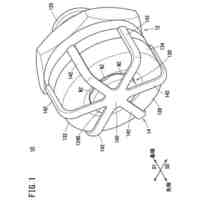
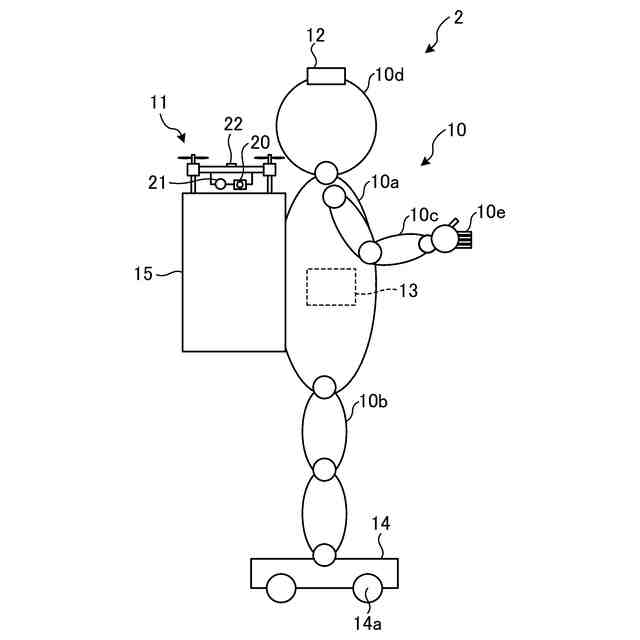
図2は、実施形態に係る追跡ロボットの概略を示す図である。
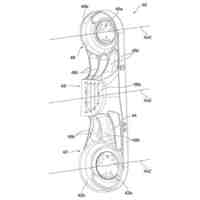
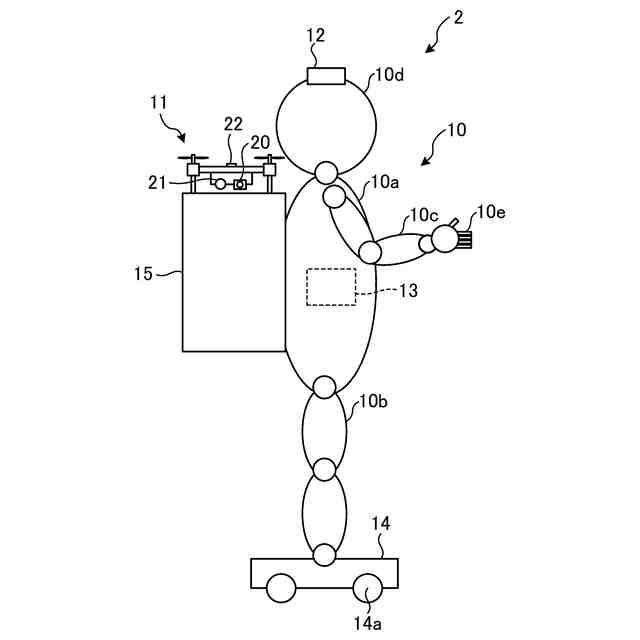
図3は、実施形態に係る追跡ロボットの概略を示す図である。
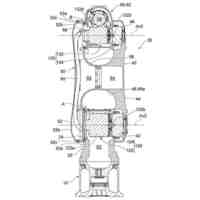
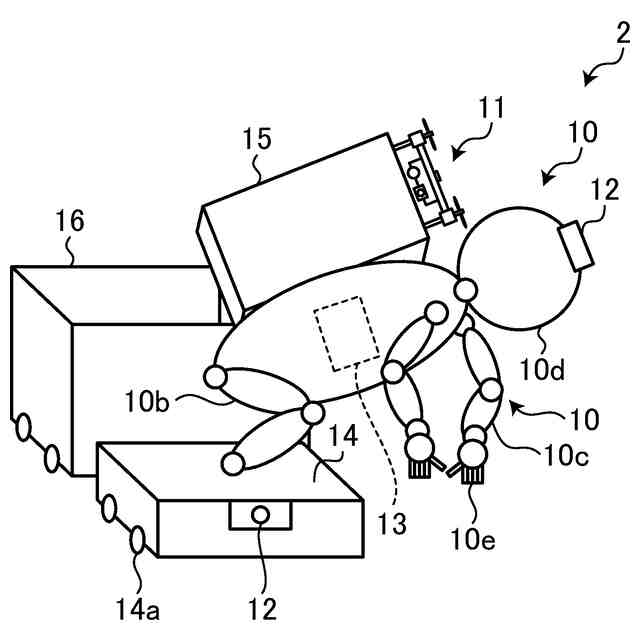
図4は、実施形態に係る追跡ロボットの概略を示す図である。
図5は、実施形態に係る追跡ロボットの制御装置の概略を示す機能ブロック図である。
図6は、実施形態に係る管理装置の概略を示す機能ブロック図である。
図7は、実施形態に係る走行制御制御処理を説明するフローチャートである。
図8は、移動体制御装置として機能するコンピュータハードウェア構成の一例を概略的に示す図である。
【発明を実施するための形態】
【0009】
以下、実施形態を通じて本発明を説明するが、以下の実施形態は特許請求の範囲に係る発明を限定するものではない。また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
【0010】
実施形態に係る追跡ロボット2を含む追跡システム1について、図1を参照し説明する。図1は、実施形態に係る追跡システム1の概略を示す図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
2か月前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
移動体
2か月前
住友重機械工業株式会社
教示装置
28日前
個人
ペグハンマおよびペグハンマ用部品
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
29日前
株式会社スター精機
吸着パッド
2か月前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
28日前
工機ホールディングス株式会社
作業機
28日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
アピュアン株式会社
衝撃工具
1か月前
株式会社マキタ
電気機器
29日前
ホシデン株式会社
分解用治具
1か月前
株式会社スター精機
産業用ロボット
2か月前
積水ハウス株式会社
フィルム除去具
1日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
2か月前
株式会社不二越
協働ロボットシステム
6日前
川崎重工業株式会社
ロボットシステム
1か月前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社安川電機
ロボット
2か月前
株式会社安川電機
ロボット
2か月前
株式会社安川電機
ロボット
2か月前
株式会社ダイヘン
ロボット制御システム
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ