TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025112639
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024006991
出願日
2024-01-19
発明の名称
センサ及び電子装置
出願人
株式会社東芝
代理人
弁理士法人iX
主分類
G01C
19/5726 20120101AFI20250725BHJP(測定;試験)
要約
【課題】検出精度の向上が可能なセンサ及び電子装置を提供する。
【解決手段】実施形態によれば、センサは、素子部及び回路部を含む。素子部は、基体面を含む基体と、基体面に固定された固定部と、固定部に支持された可動部と、複数の固定電極と、を含む。複数の固定電極は、基体面に固定され可動部と対向する。複数の固定電極は、第1、第2電極を含む。回路部は、第1、第2チャージアンプを含む。第1チャージアンプは、第1反転入力及び第1非反転入力を含む第1オペレーションアンプを含む。第1反転入力は、第1電極に電気的に接続される。第1非反転入力は、第1電位に設定される。第2チャージアンプは、第2反転入力と第2非反転入力とを含む第2オペレーションアンプを含む。第2反転入力は、第2電極に電気的に接続される。第2非反転入力は、第1電位と異なる第2電位に設定される。
【選択図】図1
特許請求の範囲
【請求項1】
基体面を含む基体と、
前記基体面に固定された固定部と、
前記固定部に支持された可動部であって、前記基体面と前記可動部との間に第1間隙が設けられた、前記可動部と、
前記基体面に固定され前記可動部と対向する複数の固定電極と、
を含む素子部と、
回路部と、
を備え、
前記複数の固定電極は、第1電極及び第2電極を含み、
前記固定部から前記第1電極への第1方向は、前記基体面に沿う第1平面に沿い、
前記固定部から前記第2電極への第2方向は、前記第1平面に沿い、前記第1方向に対して傾斜し、
前記回路部は、第1チャージアンプ及び第2チャージアンプを含み、
前記第1チャージアンプは、第1反転入力及び第1非反転入力を含む第1オペレーションアンプを含み、
前記第1反転入力は、前記第1電極に電気的に接続され、
前記第1非反転入力は、第1電位に設定され、
前記第2チャージアンプは、第2反転入力と第2非反転入力とを含む第2オペレーションアンプを含み、
前記第2反転入力は、前記第2電極に電気的に接続され、
前記第2非反転入力は、前記第1電位と異なる第2電位に設定され、
前記回路部は、前記可動部の振動状態の、前記素子部に加わる外力による変化を、前記第1チャージアンプの第1出力及び前記第2チャージアンプの第2出力に基づく第1値を用いて前記外力の角速度を検出するように構成された、センサ。
続きを表示(約 1,300 文字)
【請求項2】
前記回路部は、処理回路をさらに含み、
前記処理回路は、第1比及び第2比を出力するように構成され、
前記第1比は、前記第1出力の前記第1電位に対する比であり、
前記第2比は、前記第2出力の前記第2電位に対する比であり、
前記第1値は、前記第1比及び前記第2比の関数である、請求項1に記載のセンサ。
【請求項3】
前記複数の固定電極は、第3電極及び第4電極をさらに含み、
前記固定部から前記第3電極への第3方向は、前記第1平面に沿い、
前記固定部から前記第4電極への第4方向は、前記第1平面に沿い、前記第3方向と交差し、
前記回路部は、第1回路をさらに含み、
前記第1回路は、前記第3電極及び前記第4電極の少なくともいずれかに交流信号を供給して前記可動部を振動させるように構成された、請求項2に記載のセンサ。
【請求項4】
前記回路部は、第2回路をさらに含み、
前記第2回路は、前記第1値に基づいて、前記振動状態を前記外力が加わらないときに戻すように、前記第1回路を制御するように構成された、請求項3に記載のセンサ。
【請求項5】
前記素子部に前記外力が加わらない第1振動状態において、前記可動部は第1振動方向に沿って振動し、
前記素子部に前記外力が加わる第2振動状態において、前記振動状態は、前記第1振動方向と交差する第2振動方向の成分を含み、
前記回路部は、前記第1値を用いて、前記第2振動状態を前記第1振動状態に戻すように、前記交流信号を調整する、請求項3に記載のセンサ。
【請求項6】
前記回路部は、前記調整のための前記交流信号の変更に基づいて前記角速度を検出する、請求項5に記載のセンサ。
【請求項7】
前記可動部は、前記固定部を中心とした同心の複数の環状部を含む、請求項1に記載のセンサ。
【請求項8】
前記回路部は、前記素子部に前記外力が加わっていないときに、前記可動部を前記第1方向に沿って振動させるように構成された、請求項1~7のいずれか1つに記載のセンサ。
【請求項9】
前記複数の固定電極は、第5電極、第6電極、第7電極及び第8電極をさらに含み、
前記固定部から前記第5電極への第5方向は、前記第1平面に沿い、
前記固定部から前記第6電極への第6方向は、前記第1平面に沿い、前記第5方向と交差し、
前記固定部から前記第7電極への第7方向は、前記第1平面に沿い、
前記固定部から前記第8電極への第8方向は、前記第1平面に沿い、前記第7方向と交差し、
前記回路部は、前記第5電極、前記第6電極、前記第7電極及び前記第8電極の少なくともいずれかに第1信号を供給して前記振動状態を調整するように構成された、請求項3に記載のセンサ。
【請求項10】
請求項1に記載のセンサと、
前記センサから得られる信号に基づいて回路を制御可能な回路制御部と、
備えた、電子装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、センサ及び電子装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
例えば、MEMS(Micro Electro Mechanical Systems)素子などを用いたセンサがある。センサにおいて、精度の向上が望まれる。
【先行技術文献】
【特許文献】
【0003】
特開2020-187018号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
実施形態は、検出精度の向上が可能なセンサ及び電子装置を提供する。
【課題を解決するための手段】
【0005】
実施形態によれば、センサは、素子部及び回路部を含む。前記素子部は、基体面を含む基体と、前記基体面に固定された固定部と、前記固定部に支持された可動部と、複数の固定電極と、を含む。前記基体面と前記可動部との間に第1間隙が設けられる。前記複数の固定電極は、前記基体面に固定され前記可動部と対向する。前記複数の固定電極は、第1電極及び第2電極を含む。前記固定部から前記第1電極への第1方向は、前記基体面に沿う第1平面に沿う。前記固定部から前記第2電極への第2方向は、前記第1平面に沿い、前記第1方向に対して傾斜する。前記回路部は、第1チャージアンプ及び第2チャージアンプを含む。前記第1チャージアンプは、第1反転入力及び第1非反転入力を含む第1オペレーションアンプを含む。前記第1反転入力は、前記第1電極に電気的に接続される。前記第1非反転入力は、第1電位に設定される。前記第2チャージアンプは、第2反転入力と第2非反転入力とを含む第2オペレーションアンプを含む。前記第2反転入力は、前記第2電極に電気的に接続される。前記第2非反転入力は、前記第1電位と異なる第2電位に設定される。前記回路部は、前記可動部の振動状態の、前記素子部に加わる外力による変化を、前記第1チャージアンプの第1出力及び前記第2チャージアンプの第2出力に基づく第1値を用いて前記外力の角速度を検出するように構成される。
【図面の簡単な説明】
【0006】
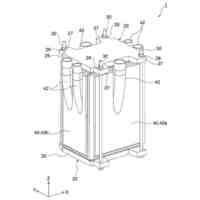
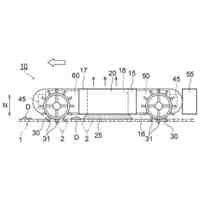
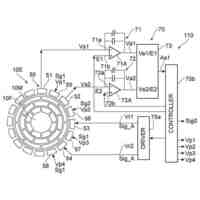
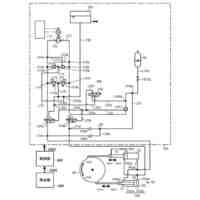
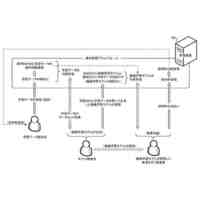
図1は、第1実施形態に係るセンサを例示する模式図である。
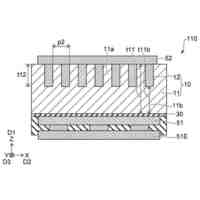
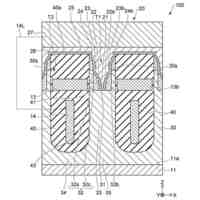
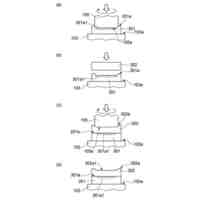
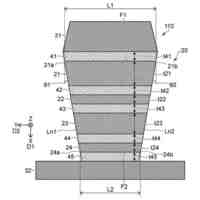
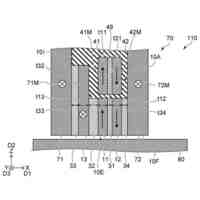
図2(a)及び図2(b)は、第1実施形態に係るセンサの一部を例示する模式図である。
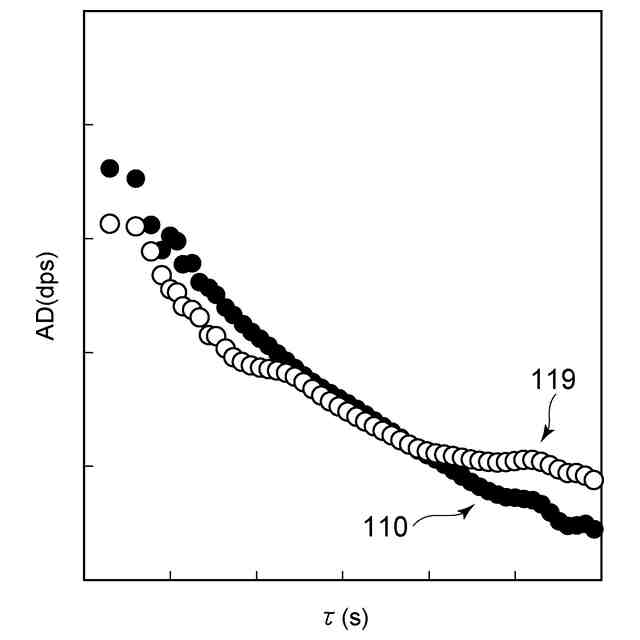
図3は、センサの特性を例示するグラフである。
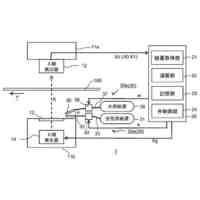
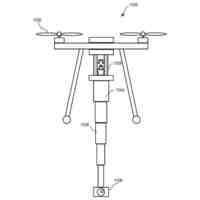
図4は、第2実施形態に係る電子装置を例示する模式図である。
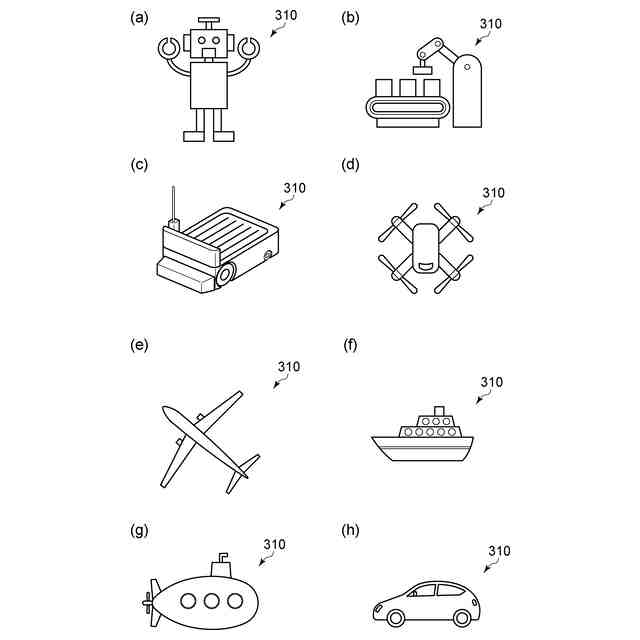
図5(a)~図5(h)は、実施形態に係る電子装置の応用を例示する模式図である。
図6(a)及び図6(b)は、実施形態に係るセンサの応用を例示する模式図である。
【発明を実施するための形態】
【0007】
以下に、本発明の各実施の形態について図面を参照しつつ説明する。
図面は模式的または概念的なものであり、各部分の厚さと幅との関係、部分間の大きさの比率などは、必ずしも現実のものと同一とは限らない。同じ部分を表す場合であっても、図面により互いの寸法や比率が異なって表される場合もある。
本願明細書と各図において、既出の図に関して前述したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
【0008】
(第1実施形態)
図1は、第1実施形態に係るセンサを例示する模式図である。
図2(a)及び図2(b)は、第1実施形態に係るセンサの一部を例示する模式図である。
図2(a)は、平面図である。図2(b)は、図2(a)のA1-A2線断面図である。
図1に示すように、実施形態に係るセンサ110は、素子部10E及び回路部70を含む。
【0009】
図2(a)及び図2(b)は、素子部10Eを例示している。素子部10Eは、基体10s、固定部10F、可動部10M、及び。複数の固定電極50を含む。基体10sは、基体面10fを含む。
【0010】
固定部10Fは、基体面10fに固定される。可動部10Mは、固定部10Fに支持される。基体面10fと可動部10Mとの間に第1間隙G1が設けられる。複数の固定電極50は、基体面10fに固定される。複数の固定電極50は、可動部10Mと対向する。可動部10Mは、導電性である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
12日前
株式会社東芝
配線治具
1か月前
株式会社東芝
燃料電池
24日前
株式会社東芝
回路素子
11日前
株式会社東芝
半導体装置
24日前
株式会社東芝
主幹制御器
1か月前
株式会社東芝
X線厚み計
17日前
株式会社東芝
アンテナ装置
16日前
株式会社東芝
ディスク装置
2日前
株式会社東芝
水中洗浄装置
1か月前
株式会社東芝
異常検出装置
3日前
株式会社東芝
計測システム
4日前
株式会社東芝
ディスク装置
5日前
株式会社東芝
電力変換装置
9日前
株式会社東芝
紫外線照射装置
12日前
株式会社東芝
部材の接合方法
5日前
株式会社東芝
センサ及び電子装置
16日前
株式会社東芝
コイル及び磁性部品
1か月前
株式会社東芝
モールド真空バルブ
13日前
株式会社東芝
制御装置及び制御方法
1か月前
株式会社東芝
点検装置及び点検方法
16日前
株式会社東芝
測定方法及び測定システム
1か月前
株式会社東芝
制御方法及び電力変換装置
1か月前
株式会社東芝
密度判定装置及びその方法
3日前
株式会社東芝
ハイブリッドサーボシステム
2日前
株式会社東芝
磁気ディスク装置および方法
20日前
株式会社東芝
磁気ヘッド及び磁気記録装置
24日前
株式会社東芝
サーバシステム、及びサーバ
12日前
株式会社東芝
学習データの権利管理システム
1か月前
株式会社東芝
磁気ヘッド、及び、磁気記録装置
3日前
株式会社東芝
磁気ヘッド、及び、磁気記録装置
1か月前
株式会社東芝
計測システム及び計測プログラム
4日前
株式会社東芝
磁気ヘッド、及び、磁気記録装置
3日前
株式会社東芝
電気機器及び電気機器の製造方法
13日前
株式会社東芝
信号処理装置および信号処理方法
24日前
株式会社東芝
磁気ヘッド、及び、磁気記録装置
3日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ