TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025113348
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2025083718,2024068954
出願日
2025-05-20,2022-08-25
発明の名称
測位方法、月測位システム、および、測位衛星
出願人
三菱電機株式会社
代理人
弁理士法人クロスボーダー特許事務所
主分類
G01S
19/02 20100101AFI20250725BHJP(測定;試験)
要約
【課題】静止衛星から送信される測位信号と、準天頂衛星から送信される測位信号とを、同時に3機以上の静止衛星ないし準天頂衛星から受信して、飛翔体の慣性座標系における位置計測を可能とすることを目的とする。
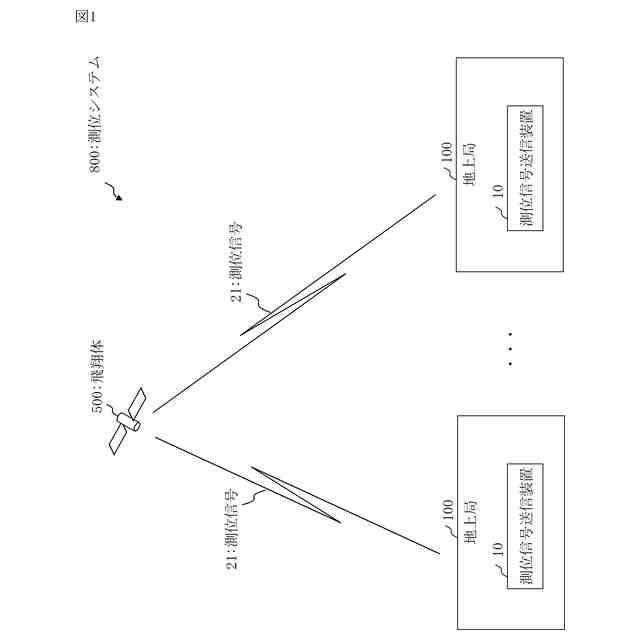
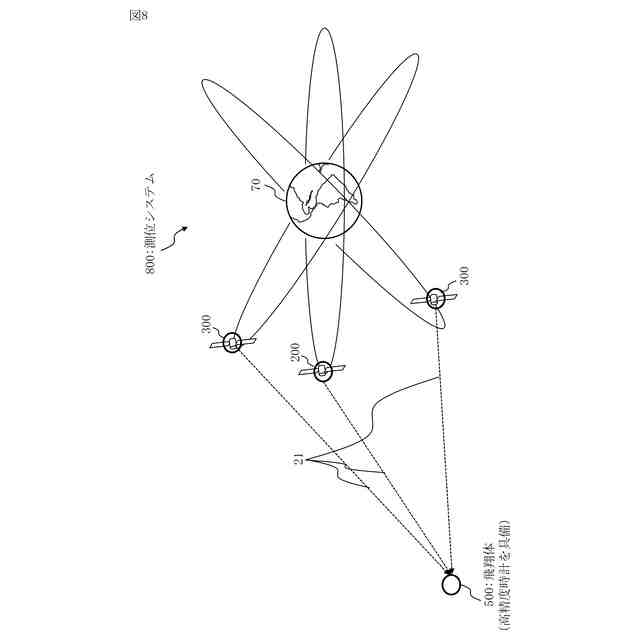
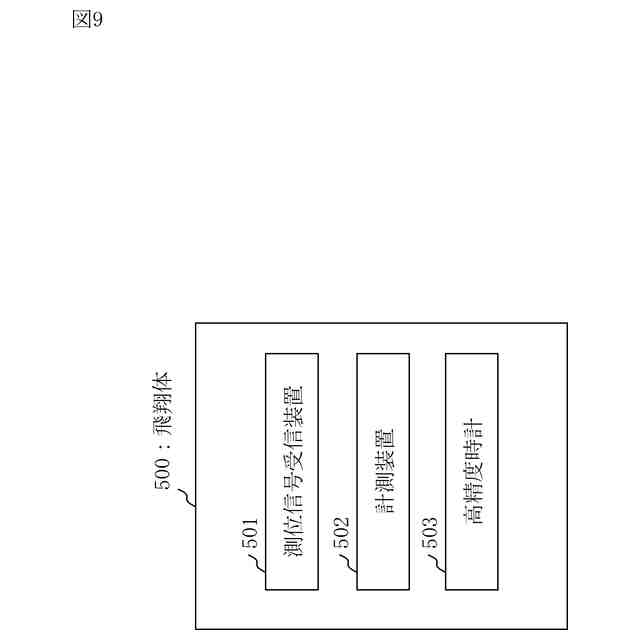
【解決手段】飛翔体500は、地球から月または惑星に向かう宇宙空間ないし月または惑星の近傍を飛翔する。飛翔体500は、測位信号受信装置501を具備する。飛翔体500は、地球固定座標系または慣性座標系における位置座標が既知である静止衛星200から送信される測位信号と、地球固定座標系または慣性座標系における位置座標が既知である準天頂衛星300から送信される測位信号とを、同時に3機以上の静止衛星200ないし準天頂衛星300から受信して、慣性座標系における位置座標を計測する。
【選択図】図8
特許請求の範囲
【請求項1】
地球から月または惑星に向かう宇宙空間ないし月または惑星の近傍を飛翔する飛翔体の位置座標を計測する測位方法であって、
前記飛翔体は、
測位信号受信装置を具備し、
測位信号送信装置を具備し、地球固定座標系または慣性座標系における位置座標が既知である静止衛星から送信する測位信号と、測位信号送信装置を具備し、地球固定座標系または慣性座標系における位置座標が既知である準天頂衛星から送信する測位信号とを、同時に3機以上の静止衛星ないし準天頂衛星から受信して、慣性座標系における位置座標を計測する測位方法。
続きを表示(約 2,000 文字)
【請求項2】
地球から月または惑星に向かう宇宙空間ないし月または惑星の近傍を飛翔し、測位信号受信装置を具備する第2の飛翔体の位置座標を計測する測位システムの測位方法であって、
前記測位システムは、
高精度時計と測位信号受信装置と測位信号送信装置とを具備する第1の飛翔体と、
測位信号送信装置を具備し、地球固定座標系または慣性座標系における位置座標が既知である静止衛星と、
測位信号送信装置を具備し、地球固定座標系または慣性座標系における位置座標が既知である準天頂衛星と
により構成され、
前記第1の飛翔体は、
同時に3機以上の静止衛星ないし準天頂衛星から測位信号を受信して、地球固定座標系または慣性座標系における位置座標を計測して、位置座標が既知である飛翔体として測位信号を送信し、
前記第2の飛翔体は、
同時に前記第1の飛翔体と、3機の静止衛星または準天頂衛星から測位信号を受信して、地球固定座標系または慣性座標系における位置座標を計測する測位方法。
【請求項3】
地球から月または惑星に向かう宇宙空間ないし月または惑星の近傍を飛翔し、測位信号受信装置を具備する第2の飛翔体の位置座標を計測する測位システムの測位方法であって、
前記測位システムは、
測位信号送信装置を具備して月を周回し、月固定座標系または慣性座標系の位置座標が既知である第1の飛翔体と、
測位信号送信装置を具備し、慣性座標系における位置座標が既知である静止衛星と、
測位信号送信装置を具備し、慣性座標系における位置座標が既知である準天頂衛星と
により構成され、
前記第2の飛翔体は、
同時に前記第1の飛翔体と、3機の静止衛星または準天頂衛星から測位信号を受信して、慣性座標系における位置座標を計測する測位方法。
【請求項4】
地球から月または惑星に向かう宇宙空間ないし月または惑星の近傍を飛翔し、測位信号受信装置を具備する第2の飛翔体の位置座標を計測する測位システムの測位方法であって、
前記測位システムは、
月面に設置され、高精度時計と測位信号送信装置を具備し、月固定座標系または慣性座標系の位置座標が既知である月面局と、
測位信号送信装置を具備し、慣性座標系における位置座標が既知である静止衛星と、
測位信号送信装置を具備し、慣性座標系における位置座標が既知である準天頂衛星と
により構成され、
前記第2の飛翔体は、
同時に前記月面局と、3機の静止衛星または準天頂衛星から測位信号を受信して、慣性座標系における位置座標を計測する測位方法。
【請求項5】
地球から月または惑星に向かう宇宙空間ないし月または惑星の近傍を飛翔し、測位信号受信装置を具備する第2の飛翔体の位置座標を計測する測位システムの測位方法であって、
前記測位システムは、
月面に設置され、高精度時計と測位信号送信装置を具備し、月固定座標系または慣性座標系の位置座標が既知である月面局と、
測位信号送信装置を具備して月を周回し、月固定座標系または慣性座標系の位置座標が既知である第1の飛翔体と、
測位信号送信装置を具備し、慣性座標系における位置座標が既知である静止衛星と、
測位信号送信装置を具備し、慣性座標系における位置座標が既知である準天頂衛星と
により構成され、
前記第2の飛翔体は、
同時に前記月面局と、前記第1の飛翔体と、2機の静止衛星または準天頂衛星から測位信号を受信して、慣性座標系における位置座標を計測する測位方法。
【請求項6】
月面に設置され、高精度時計と測位信号送信装置を具備し、月固定座標系の位置座標が既知である月面局と、
高精度時計と測位信号送信装置とを具備して月を周回し、月固定座標系の位置座標が既知である第3の飛翔体と
の両方または片方により構成され、
前記月面局と前記第3の飛翔体の合計数が4以上である月測位システム。
【請求項7】
静止軌道、または準天頂軌道を飛翔し、
衛星座標系のX軸を東面進行方向、Y軸を南方向、Z軸を地球方向として、
太陽電池パドルが北面(-Y)1翼構成で、
南面(+Y)に測位信号送信装置を搭載し、
南北軸(Y軸)回りに反地球方向(-Z軸)からAzimuth±170degを包含する測位信号送信視野、および、XZ面に対してElevation-25deg以上(北側)、Elevation36deg以上(南側)の測位信号送信視野を確保する測位衛星。
発明の詳細な説明
【技術分野】
【0001】
本開示は、測位方法、月測位システム、および、測位衛星に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
月および火星をはじめとする惑星への進出が加速している。このため、地球から月あるいは惑星へ向かう飛翔体、往還する飛翔体、および、月あるいは惑星を周回する飛翔体の位置計測手段と環境の整備が必要となる。地球上および大気圏では、測位衛星群により地球固定座標系での位置計測が可能となっている。また、地球周辺においても測位衛星群の測位信号により、地球上および大気圏と同様に地球固定座標系における位置計測が可能である。
【0003】
特許文献1は、地球低軌道または静止軌道から、目標の軌道または目的地まで輸送船を電気推進で推進する方法が開示されている。
【先行技術文献】
【特許文献】
【0004】
国際公開第2018/029839号
【発明の概要】
【発明が解決しようとする課題】
【0005】
測位衛星の送信する測位信号は、電波環境を健全に維持するため、ITUで管理される。そのため、周波数と送信レベルに制約があり、地球から遠方を飛翔するとノイズに埋もれて測位ができなくなるという課題がある。ITUは、International Telecommunication Unionの略語である。
【0006】
本開示では、静止衛星から送信される測位信号と、準天頂衛星から送信される測位信号とを、同時に3機以上の静止衛星ないし準天頂衛星から受信して、飛翔体の慣性座標系における位置計測を可能とすることを目的とする。
【課題を解決するための手段】
【0007】
本開示に係る測位方法は、地球から月または惑星に向かう宇宙空間ないし月または惑星の近傍を飛翔する飛翔体の位置座標を計測する測位方法である。
前記飛翔体は、
測位信号受信装置を具備し、
測位信号送信装置を具備し、地球固定座標系または慣性座標系における位置座標が既知である静止衛星から送信する測位信号と、測位信号送信装置を具備し、地球固定座標系または慣性座標系における位置座標が既知である準天頂衛星から送信する測位信号とを、同時に3機以上の静止衛星ないし準天頂衛星から受信して、慣性座標系における位置座標を計測する。
【発明の効果】
【0008】
本開示に係る測位方法では、地球から月または惑星に向かう宇宙空間ないし月または惑星の近傍を飛翔する飛翔体の位置座標を計測する。前記飛翔体は、測位信号受信装置を具備し、測位信号送信装置を具備し、地球固定座標系または慣性座標系における位置座標が既知である静止衛星から送信する測位信号と、測位信号送信装置を具備し、地球固定座標系または慣性座標系における位置座標が既知である準天頂衛星から送信する測位信号とを、同時に3機以上の静止衛星ないし準天頂衛星から受信して、慣性座標系における位置座標を計測する。地球固定座標系と慣性座標系は座標変換が可能であり、地球固定座標系で位置座標が既知の静止衛星200または準天頂衛星300の位置座標は、慣性座標系に変換することができる。よって、本開示に係る測位方法によれば、飛翔体の慣性座標系における位置計測を可能とするという効果がある。
【図面の簡単な説明】
【0009】
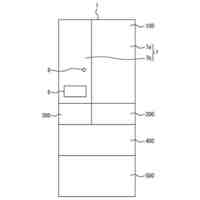
実施の形態1に係る測位システム800の構成例を示す図である。
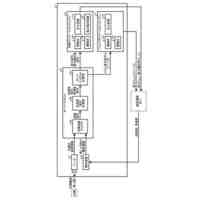
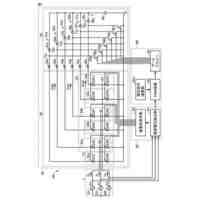
実施の形態1に係る飛翔体の機能構成例を示す図。
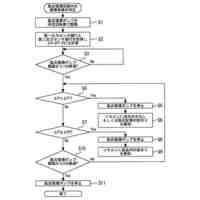
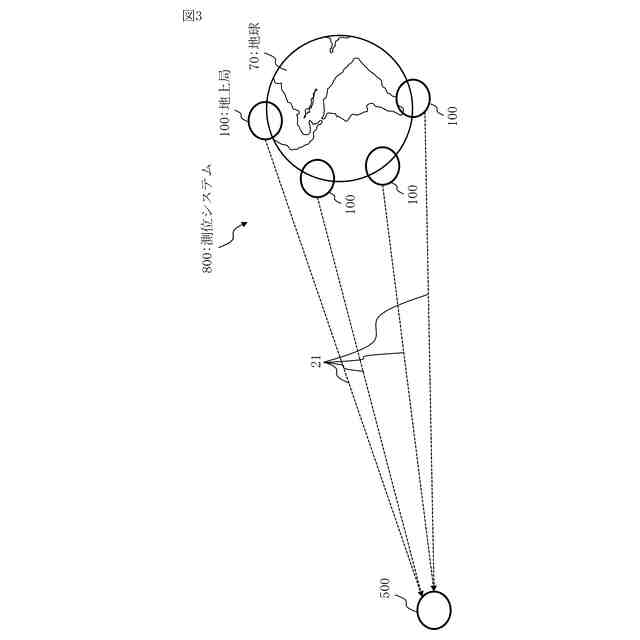
実施の形態1に係る測位方法の例1を示す図。
実施の形態2に係る衛星の構成例を示す図。
実施の形態2に係る測位方法の例2を示す図。
実施の形態2に係る静止衛星の機能構成例を示す図。
実施の形態2に係る準天頂衛星の機能構成例を示す図。
実施の形態2に係る測位方法の例3を示す図。
実施の形態2に係る測位方法の例3における飛翔体の機能構成例を示す図。
実施の形態3に係る測位方法の例5を示す図。
実施の形態3に係る第1の飛翔体の構成例を示す図。
実施の形態4に係る測位方法の例6を示す図。
実施の形態4に係る測位方法の例7を示す図。
実施の形態4に係る月面局の構成例を示す図。
実施の形態4に係る測位方法の例8を示す図。
実施の形態5に係る月測位システムの構成例を示す図。
実施の形態5に係る第3の飛翔体の構成例を示す図。
実施の形態6に係る測位衛星の構成例を示す図。
実施の形態6に係る測位衛星を用いた測位信号の送信例を示す図。
【発明を実施するための形態】
【0010】
以下、本開示の実施の形態について、図を用いて説明する。なお、各図中、同一または相当する部分には、同一符号を付している。実施の形態の説明において、同一または相当する部分については、説明を適宜省略または簡略化する。また、以下の図面では各構成の大きさの関係が実際のものとは異なる場合がある。また、実施の形態の説明において、「上」、「下」、「左」、「右」、「前」、「後」、「表」、「裏」といった方向あるいは位置が示されている場合がある。それらの表記は、説明の便宜上、そのように記載しているだけであって、装置、器具、あるいは部品といった構成の配置および向きを限定するものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
ミラー
29日前
三菱電機株式会社
冷蔵庫
29日前
三菱電機株式会社
給湯機
4日前
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
照明器具
1か月前
三菱電機株式会社
束線器具
1か月前
三菱電機株式会社
電源回路
27日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
送風装置
1日前
三菱電機株式会社
照明器具
今日
三菱電機株式会社
送風装置
1か月前
三菱電機株式会社
照明器具
1か月前
三菱電機株式会社
照明装置
12日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
照明装置
4日前
三菱電機株式会社
電気接続部
26日前
三菱電機株式会社
漏電遮断器
1か月前
三菱電機株式会社
加熱調理器
20日前
三菱電機株式会社
半導体装置
7日前
三菱電機株式会社
浴室乾燥機
1か月前
三菱電機株式会社
飛しょう体
7日前
三菱電機株式会社
加熱調理器
今日
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
電気掃除機
1か月前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
電力変換装置
1か月前
三菱電機株式会社
散水システム
8日前
三菱電機株式会社
電力変換装置
19日前
三菱電機株式会社
スイッチギヤ
13日前
三菱電機株式会社
電力変換装置
1か月前
三菱電機株式会社
電力変換装置
29日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ