TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025114914
公報種別
公開特許公報(A)
公開日
2025-08-06
出願番号
2024009151
出願日
2024-01-25
発明の名称
情報処理装置、遠隔操作システム及び情報処理方法
出願人
西松建設株式会社
,
株式会社ネクステラス
代理人
個人
,
個人
主分類
H04Q
9/00 20060101AFI20250730BHJP(電気通信技術)
要約
【課題】必要な量の学習データを確保して適切な学習精度を得ることのできる情報処理装置、遠隔操作システム及び情報処理方法を提供する。
【解決手段】情報処理装置(40)は、CPU(41)を備える。CPU(41)は、生成部として、建設現場における作業機械の遠隔操作に用いられる遠隔操作室をデジタル空間で再現した仮想操作室を生成する。CPU(41)は、学習部として、仮想操作室から出力される作業機械の動作制御データと、動作制御データに応じた作業機械の仮想的な動作に基づいて作業機械の監視装置により仮想的に得られて仮想操作室に入力される監視データと、を含む入出力データにより、監視データに対する作業機械の動作制御の内容を学習する。
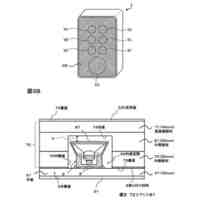
【選択図】図3
特許請求の範囲
【請求項1】
建設現場における作業機械の遠隔操作に用いられる遠隔操作室をデジタル空間で再現した仮想操作室を生成する生成部と、
前記仮想操作室から出力される前記作業機械の動作制御データと、前記動作制御データに応じた前記作業機械の仮想的な動作に基づいて前記作業機械の監視装置により仮想的に得られて前記仮想操作室に入力される監視データと、を含む入出力データにより、前記監視データに対する前記作業機械の動作制御の内容を学習する学習部と、
を備える、情報処理装置。
続きを表示(約 860 文字)
【請求項2】
前記入出力データは、前記建設現場における前記作業機械に係る撮影データを含む、請求項1記載の情報処理装置。
【請求項3】
前記撮影データには、前記作業機械の運転席から視認可能な当該作業機械の周囲を撮影した画像を含む、請求項2記載の情報処理装置。
【請求項4】
前記監視データは、前記動作制御データに基づいて前記デジタル空間で仮想的に実行された結果に応じた情報を含む、請求項1記載の情報処理装置。
【請求項5】
前記建設現場は、トンネルである、請求項1記載の情報処理装置。
【請求項6】
前記学習には、強化学習が用いられる、請求項1記載の情報処理装置。
【請求項7】
請求項1記載の情報処理装置により得られた学習結果を記憶する記憶部と、制御部と、出力部と、操作受付部と、を備える遠隔操作装置と、
建設現場を撮影して前記作業機械の監視に係る撮影データを得る撮影装置と、
を含み、
前記制御部は、
前記操作受付部により受け付けられた入力操作に応じて、前記作業機械へ動作制御信号を出力し、
前記出力部は、前記撮影データを表示させ、
前記撮影データと、前記記憶部に記憶された前記学習結果とに基づいて、前記作業機械に対して自動で前記動作制御信号を出力することが可能である、
遠隔操作システム。
【請求項8】
建設現場における作業機械の遠隔操作に用いられる遠隔操作室をデジタル空間で再現した仮想操作室を生成する生成ステップ、
前記仮想操作室から出力される前記作業機械の動作制御データと、前記動作制御データに応じた前記作業機械の仮想的な動作に基づいて前記作業機械の監視装置により仮想的に得られて前記仮想操作室に入力される監視データと、を含む入出力データにより、前記監視データに対する前記作業機械の動作制御の内容を学習する学習ステップ、
を含む情報処理方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、遠隔操作システム及び情報処理方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
建設現場における建設機械は、搭乗運転者の置かれる環境が快適に保ちにくく危険でもあるため、監視装置による撮影画像や計測結果などに基づいて遠隔操作する技術の開発が進んでいる。また、建設現場の作業手順などのシミュレーションなどを目的として、CADデータや撮影画像などに基づいて建設現場をデジタル空間に再現した模擬空間が構築されている。特許文献1では、模擬空間においてドーザなどの建設機械の操作パターンに応じた作業効率を求めてこれを適用し、実現場の作業効率を最適化する技術が発明されている。
【0003】
一方、作業員の高齢化や減少に鑑みて、建設機械の自動運転についても注目されている。自動運転に関する技術としては、限定的な機械制御が実用化された後、さらなる適応条件の拡大を狙い、撮影画像やセンサ計測の結果に基づく機械学習の活用が試みられている。建設現場は、多様な環境である反面、状況をコントロールできないことが多い。そのため現場経験だけでは学習データ不足から機械学習が完結しない場合の代替として、前記シミュレーションで使うような模擬空間の中で効率よく機械学習を行うことが提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2023-131859号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、自動運転に帰結できる精度の機械学習を模擬空間で行うには、当該模擬空間のリアリティ、すなわち自動運転させたい作業環境の再現性が重要となる。再現性を追求するほどコスト増となるが、現実のコスト制約から再現性を妥協すると、学習精度が上がらないという課題に直面する。そこで、限られたコストで学習精度の上がる模擬空間を作ることが課題となっていた。
【0006】
上記課題を解決するために、本発明は、模擬空間にある建設機械の遠隔操作を対象として機械学習を行い、必要な量の学習データを確保して適切な学習精度を得ることのできる情報処理装置、遠隔操作システム及び情報処理方法を提供する。
【課題を解決するための手段】
【0007】
本発明の一の態様は、
建設現場における作業機械の遠隔操作に用いられる遠隔操作室をデジタル空間で再現した仮想操作室を生成する生成部と、
前記仮想操作室から出力される前記作業機械の動作制御データと、前記動作制御データに応じた前記作業機械の仮想的な動作に基づいて前記作業機械の監視装置により仮想的に得られて前記仮想操作室に入力される監視データと、を含む入出力データにより、前記監視データに対する前記作業機械の動作制御の内容を学習する学習部と、
を備える、情報処理装置である。
【発明の効果】
【0008】
本発明によれば、遠隔操作についての必要な量の学習データを確保して適切な学習精度を得ることができる。
【図面の簡単な説明】
【0009】
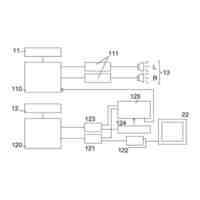
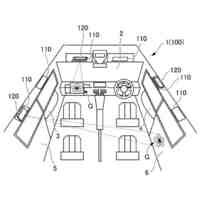
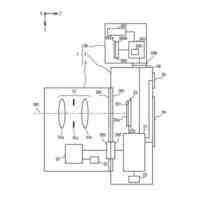
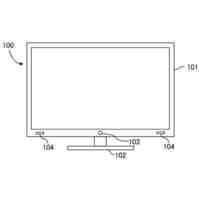
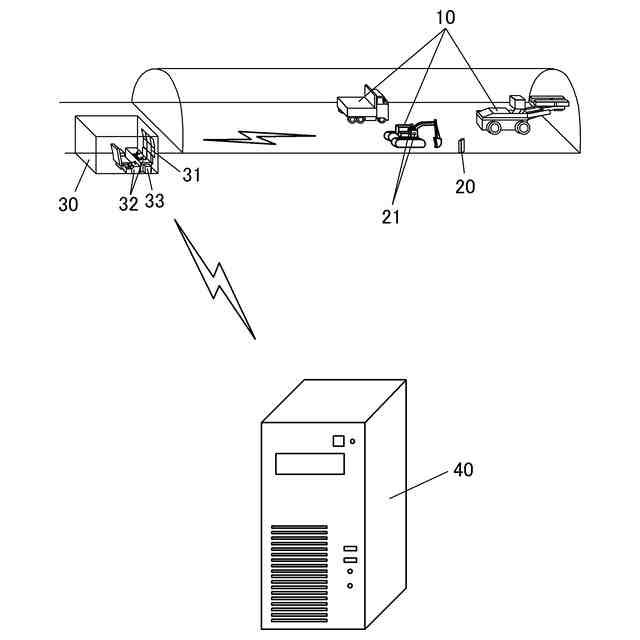
遠隔操作システムの全体構成を示す図である。
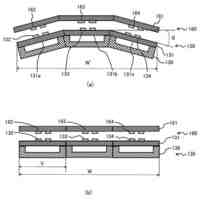
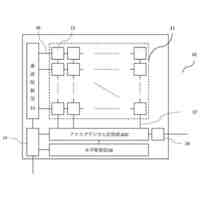
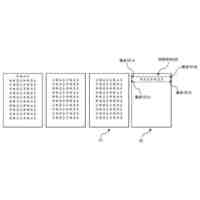
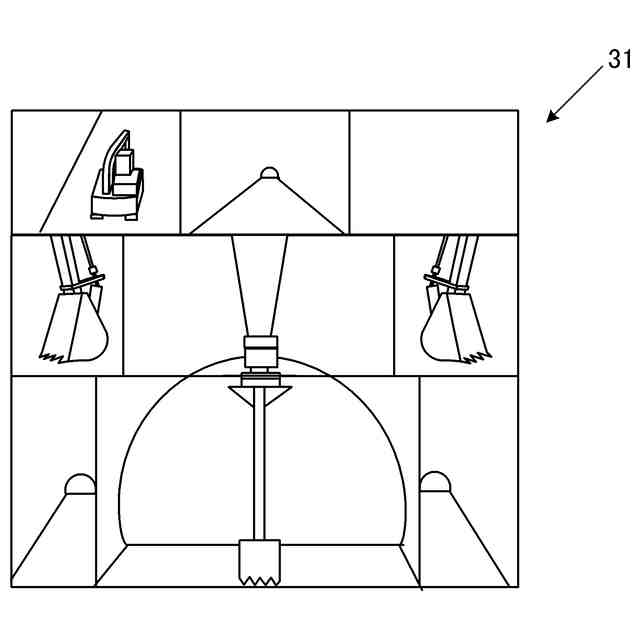
表示パネルを説明する図である。
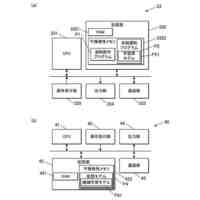
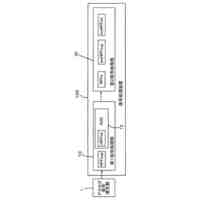
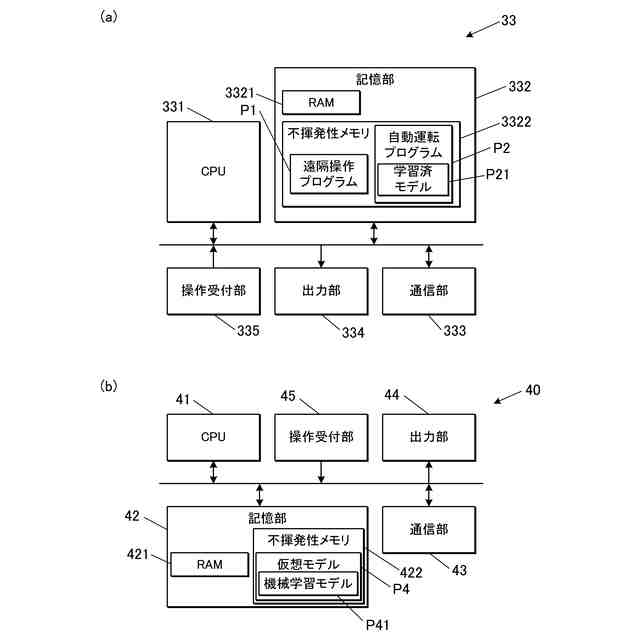
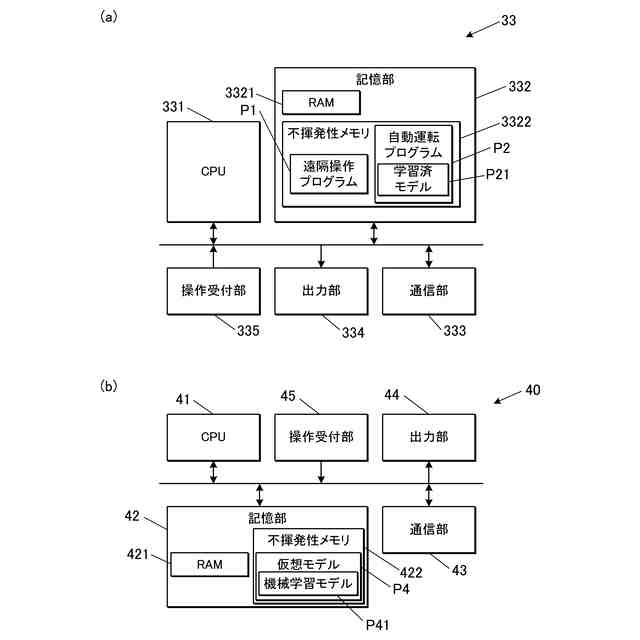
制御装置及び情報処理装置の機能構成を説明するブロック図である。
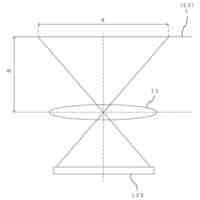
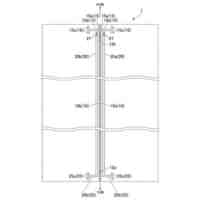
仮想モデルの位置づけについて説明する図である。
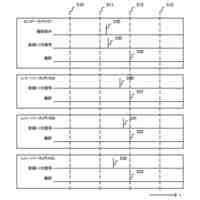
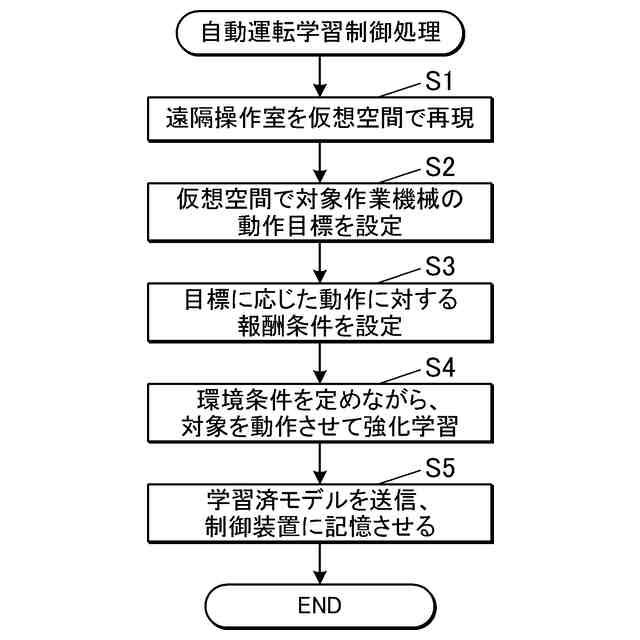
自動運転の学習制御処理の手順を示すフローチャートである。
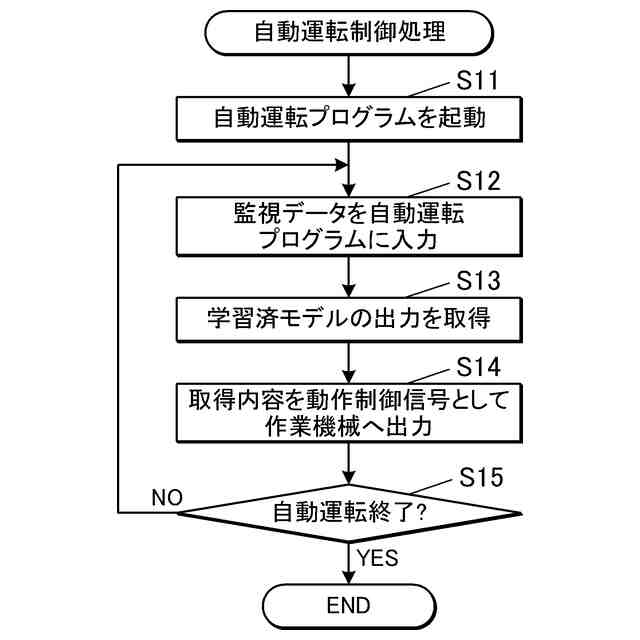
自動運転の制御手順を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、実施の形態を図面に基づいて説明する。
図1は、本実施形態の遠隔操作システム100の全体構成を示す図である。
遠隔操作システム100は、例えば、トンネルの建設に係る動作を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
西松建設株式会社
護岸ブロック及び護岸構造物
3日前
西松建設株式会社
海藻類生育装置および海藻類の生産方法
1か月前
西松建設株式会社
情報処理装置、遠隔操作システム及び情報処理方法
4日前
個人
音響装置
2か月前
個人
店内配信予約システム
25日前
サクサ株式会社
中継装置
1か月前
日本無線株式会社
音声通信方式
2か月前
キヤノン株式会社
通信装置
2か月前
キヤノン株式会社
電子機器
24日前
キヤノン株式会社
撮像装置
1か月前
日本精機株式会社
車両用表示装置
2か月前
電気興業株式会社
無線中継器
1か月前
ヤマハ株式会社
信号処理装置
1か月前
株式会社リコー
画像形成装置
2日前
キヤノン電子株式会社
モバイル装置
1か月前
個人
補聴器のイヤピース耳穴挿入具
2か月前
キヤノン電子株式会社
画像読取装置
2か月前
日本精機株式会社
画像投映システム
1か月前
株式会社ヴィーネックス
カメラ
2か月前
株式会社ニコン
撮像装置
12日前
キヤノン株式会社
通信システム
2か月前
リオン株式会社
電気機械変換器
2か月前
キヤノン株式会社
画像表示装置
2か月前
キヤノン株式会社
撮影システム
2か月前
キヤノン株式会社
画像処理装置
2か月前
株式会社シグマ
撮像素子及び撮像装置
2か月前
シャープ株式会社
電子機器
2か月前
シャープ株式会社
表示装置
2か月前
DXO株式会社
情報処理システム
9日前
パテントフレア株式会社
水中電波通信法
6日前
キヤノン電子株式会社
画像読取システム
2か月前
株式会社クーネル
音響装置
2か月前
エルメック株式会社
信号伝送回路
2か月前
テックス通信株式会社
電話システム
1か月前
個人
外部ヘッダ変換通信装置および通信網
1か月前
株式会社オーディオテクニカ
受光器
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ