TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115175
公報種別
公開特許公報(A)
公開日
2025-08-06
出願番号
2024009560
出願日
2024-01-25
発明の名称
ロボットシステム
出願人
コネクテッドロボティクス株式会社
代理人
個人
主分類
B25J
15/08 20060101AFI20250730BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対象物に直接的に接触するエンドエフェクタの振動による悪影響を抑制できるロボットシステムを提供すること。
【解決手段】ロボットシステム1は、ロボット10と、ロボット10によって移動される保持部材100と、ロボット10と保持部材100との間に配置される接続部150と、を備える。接続部150は、保持部材100を形成する第一材料よりも剛性が低い第二材料で形成されている。
【選択図】図2
特許請求の範囲
【請求項1】
ロボットと、
前記ロボットによって移動されるエンドエフェクタと、
前記ロボットと前記エンドエフェクタとの間に配置される接続部と、を備え、
前記接続部は、前記エンドエフェクタを形成する第一材料よりも剛性が低い第二材料で形成されている、
ロボットシステム。
続きを表示(約 800 文字)
【請求項2】
前記第一材料は金属であり、前記第二材料は樹脂である、
請求項1記載のロボットシステム。
【請求項3】
前記第二材料である樹脂は、金属検出機による検出が可能な添加物を含有する、
請求項2記載のロボットシステム。
【請求項4】
さらに、前記ロボット、前記接続部、及び前記エンドエフェクタのうちの少なくとも1つに配置された重量センサであって、前記エンドエフェクタが保持する対象物の重量を計測するための重量センサを備える、
請求項1~3のいずれか一項に記載のロボットシステム。
【請求項5】
前記接続部は、
前記ロボットに固定される第一固定部と、
前記エンドエフェクタに固定される第二固定部と、を有する、
請求項1~3のいずれか一項に記載のロボットシステム。
【請求項6】
前記第一固定部は、前記ロボットが有する第一被固定面と対向する第一固定面を有し、
前記第二固定部は、前記エンドエフェクタが有する第二被固定面と対向する第二固定面であって、第一固定面と平行ではない第二固定面を有する、
請求項5記載のロボットシステム。
【請求項7】
前記ロボットは、
前記エンドエフェクタに付着した物体を落下させるための付着物除去動作であって、前記エンドエフェクタの移動を伴う付着物除去動作を実行する、
請求項1~3のいずれか一項に記載のロボットシステム。
【請求項8】
前記ロボットは、
前記エンドエフェクタを対象物に差し込んだ後に、差し込み方向に交差する方向に前記エンドエフェクタを移動させてから前記エンドエフェクタを前記対象物から抜き出す動作を実行する、
請求項1~3のいずれか一項に記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1は、2以上の指部でワークを把持するロボット用把持装置を開示している。このロボット用把持装置において、指部本体の先端内側には、柔軟材料から形成された第一滑止部が取り付けられている。特許文献2は、物品を把持するロボットハンドの指部に配設されるロボットハンド用パッドを開示している。このロボットハンド用パッドは互いに交差する溝で区画された複数の柱状ブロックを表面に有し、柱状ブロックは、合成樹脂により形成されている。特許文献3は、ロボットハンドを開示している。このロボットハンドは、対向配置され、基端側から先端側に向かう少なくとも一部分が弾性部を含んで構成される2つの爪と、2つの爪を近づける方向または離れる方向に駆動する駆動部と、を備える。
【先行技術文献】
【特許文献】
【0003】
特許第5681278号公報
特開2022-164979号公報
特開2018-144216号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来の技術では、対象物を把持等する装置において、対象物に接触する部材の一部に比較的に柔らかい材料を用いることで、対象物との密着性の向上、対象物の形状への追従性の向上、または、対象物の把持の解消のしやすさの向上等が試みられている。しかしながら、対象物を保持するなどの、対象物に力学的な作用を与える装置において、より確実に当該作用を対象物に与える、という観点からは、対象物に接触する部材は、金属等の剛性の高い材料で形成されていることが好ましい。一方、剛性が高い材料で形成された部材で対象物の保持等の動作を行った場合、外力または当該部材の慣性等により発生した振動が収まり難いという問題が生じる。このことは、例えば、保持した対象物の重量の計測等の作業を阻害する要因となり、その結果、作業効率が低下する。
【0005】
本発明は、本願発明者が上記課題に新たに着目することによってなされたものであり、対象物に直接的に接触するエンドエフェクタの振動による悪影響を抑制できるロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係るロボットシステムは、ロボットと、前記ロボットによって移動されるエンドエフェクタと、前記ロボットと前記エンドエフェクタとの間に配置される接続部と、を備え、前記接続部は、前記エンドエフェクタを形成する第一材料よりも剛性が低い第二材料で形成されている。
【発明の効果】
【0007】
本発明におけるロボットシステムによれば、対象物に直接的に接触するエンドエフェクタの振動による悪影響を抑制できるロボットシステムを提供することを目的とする。
【図面の簡単な説明】
【0008】
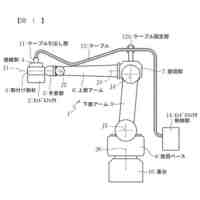
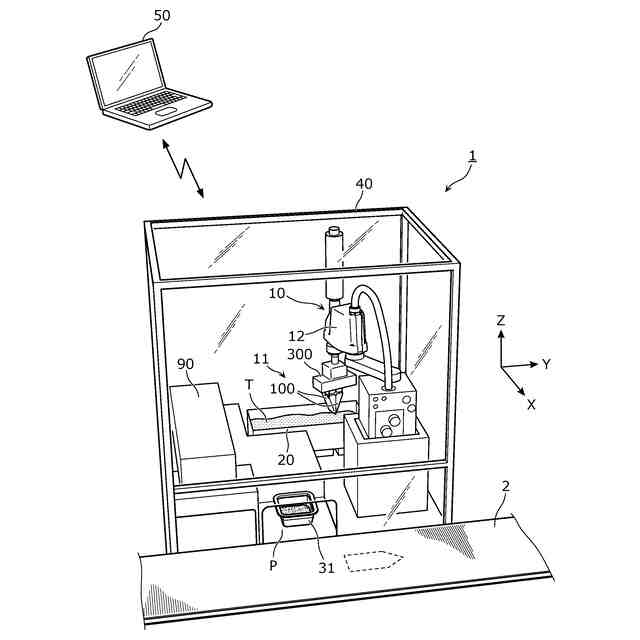
実施の形態に係るロボットシステムの外観を示す斜視図である。
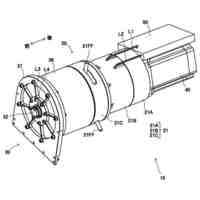
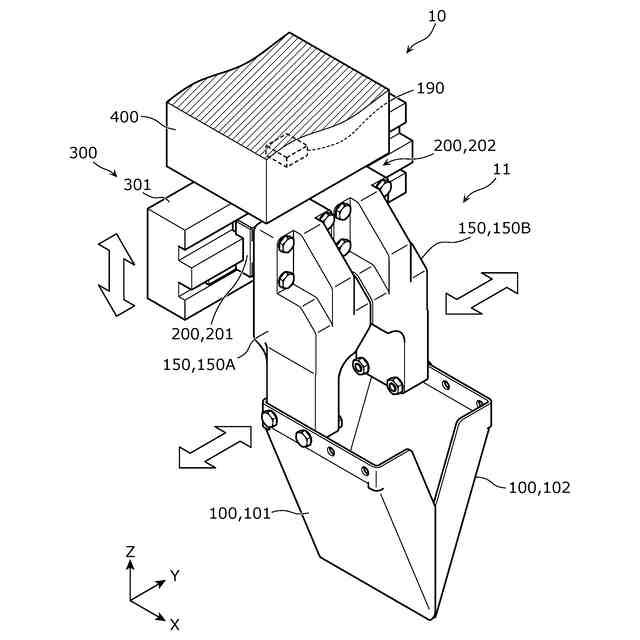
実施の形態に係る作業ユニットの構成を示す斜視図である。
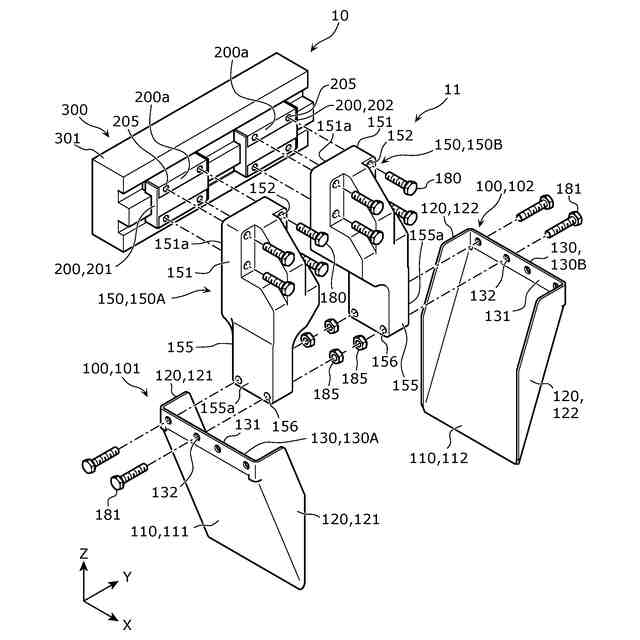
実施の形態に係る作業ユニットの分解斜視図である。
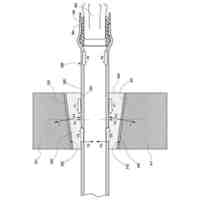
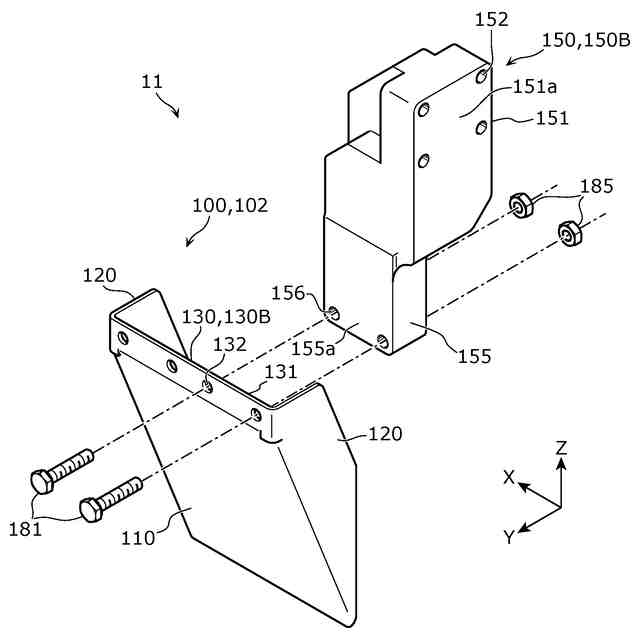
実施の形態に係る保持部材及び接続部の構成を示す斜視図である。
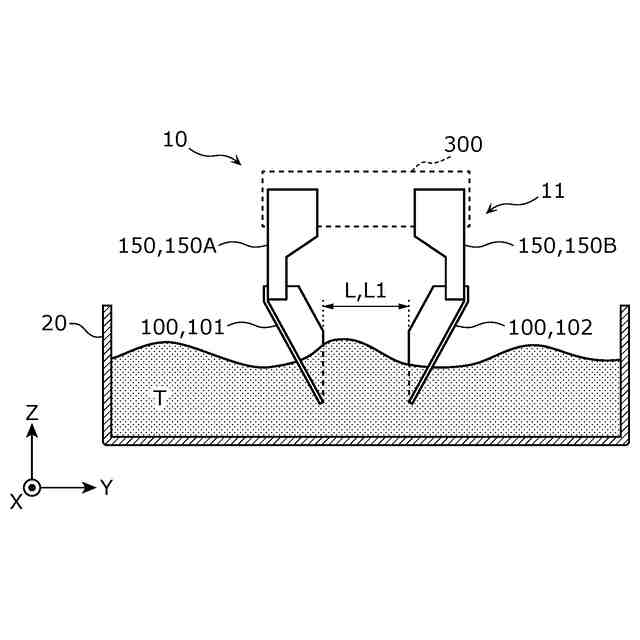
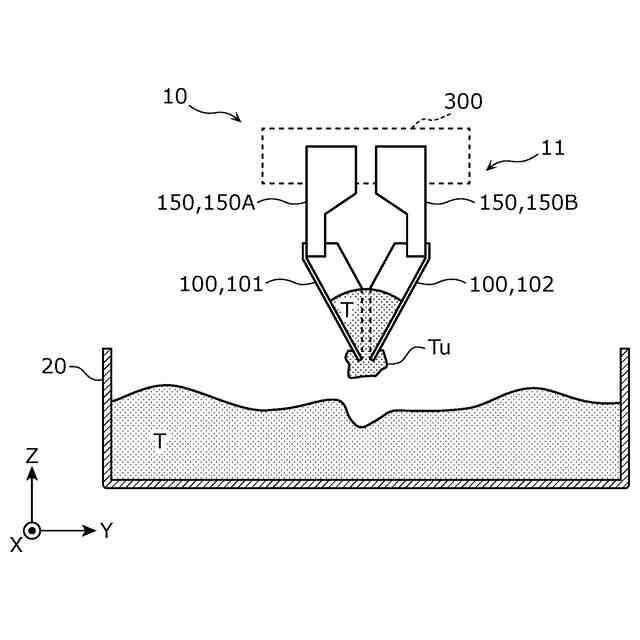
実施の形態に係る作業ユニットが対象物を保持する際の動作例を説明する第1の模式図である。
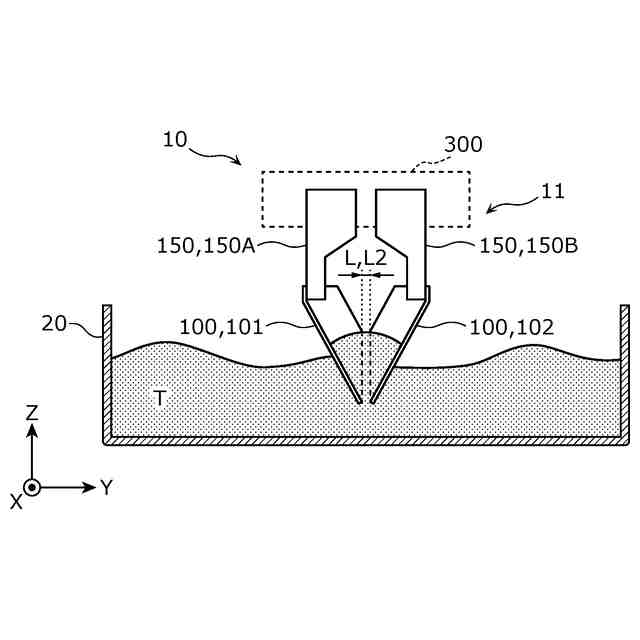
実施の形態に係る作業ユニットが対象物を保持する際の動作例を説明する第2の模式図である。
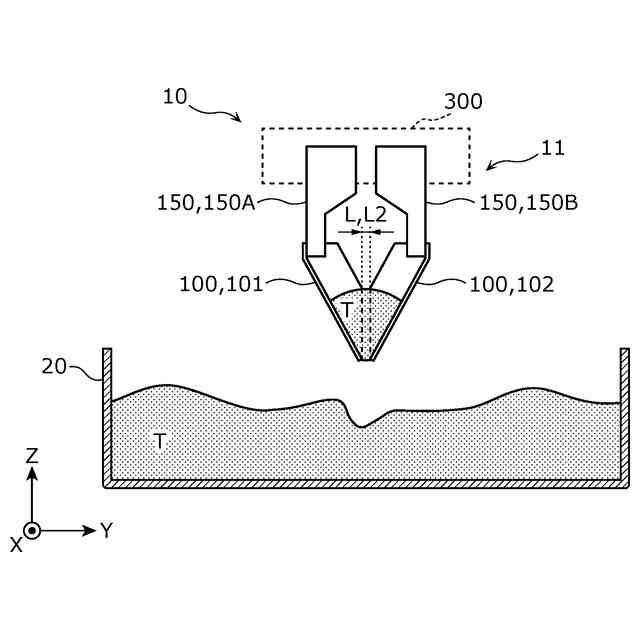
実施の形態に係る作業ユニットが対象物を保持する際の動作例を説明する第3の模式図である。
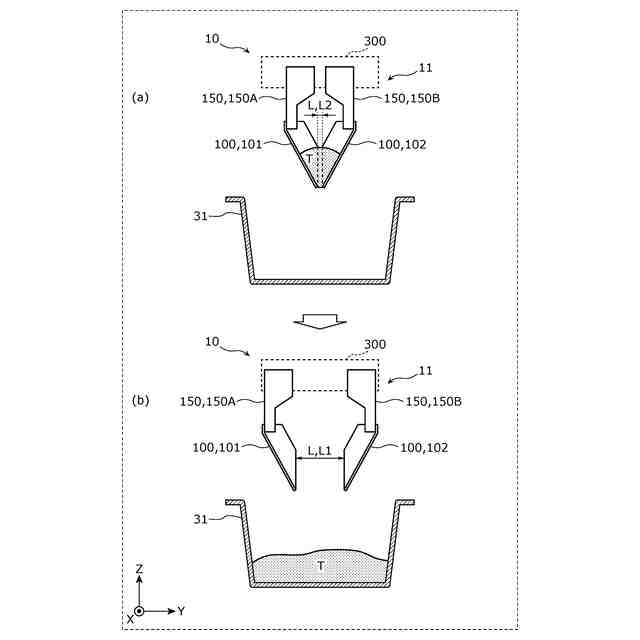
実施の形態に係る作業ユニットが対象物を解放する際の動作例を説明する模式図である。
実施の形態に係る保持部材の保持動作の直後の状態の一例を模式的に示す図である。
実施の形態に係る付着物除去動作の第1の例を説明する図である。
実施の形態に係る付着物除去動作の第2の例を説明する図である。
実施の形態に係る保持部材の解放動作の直後の状態の一例を模式的に示す図である。
実施の形態に係る付着物除去動作の第3~第5の例を説明する図である。
実施の形態に係る付着物除去動作の第6及び第7の例を説明する図である。
【発明を実施するための形態】
【0009】
本発明の一態様に係るロボットシステムは、ロボットと、前記ロボットによって移動されるエンドエフェクタと、前記ロボットと前記エンドエフェクタとの間に配置される接続部と、を備え、前記接続部は、前記エンドエフェクタを形成する第一材料よりも剛性が低い第二材料で形成されている。
【0010】
この構成によれば、エンドエフェクタと、エンドエフェクタを移動させるロボットとの間に接続部が備えられており、接続部は、エンドエフェクタを形成する第一材料よりも剛性が低い第二材料で形成されている。従って、エンドエフェクタの振動の大きさまたは/及び振動の継続を抑制すること(以下、単に「振動を抑制する」ともいう。)ができる。このように、本態様のロボットシステムによれば、例えば対象物に直接的に接触するエンドエフェクタの剛性を高く保ったまま、エンドエフェクタの振動による悪影響を抑制できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
2か月前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
移動体
2か月前
トヨタ自動車株式会社
関節機構
2か月前
株式会社ダイヘン
搬送装置
1か月前
住友重機械工業株式会社
教示装置
28日前
個人
ペグハンマおよびペグハンマ用部品
1か月前
川崎重工業株式会社
ロボット
29日前
工機ホールディングス株式会社
作業機
28日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
学校法人五島育英会
アーム機構
2か月前
株式会社スター精機
吸着パッド
2か月前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
28日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
株式会社PILLAR
チューブ保持治具
2か月前
住友重機械工業株式会社
支援装置
1か月前
株式会社マキタ
電気機器
29日前
アピュアン株式会社
衝撃工具
1か月前
ホシデン株式会社
分解用治具
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
積水ハウス株式会社
フィルム除去具
1日前
株式会社スター精機
産業用ロボット
2か月前
株式会社マキタ
電動作業機
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社マキタ
電動作業機
2か月前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社リコー
多関節ロボット
2か月前
株式会社リコー
多関節ロボット
1か月前
株式会社不二越
協働ロボットシステム
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ