TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115499
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2024009978
出願日
2024-01-26
発明の名称
補正方法、システムおよびプログラム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
H04N
5/74 20060101AFI20250731BHJP(電気通信技術)
要約
【課題】投射位置の補正計算の複雑化を低減する。
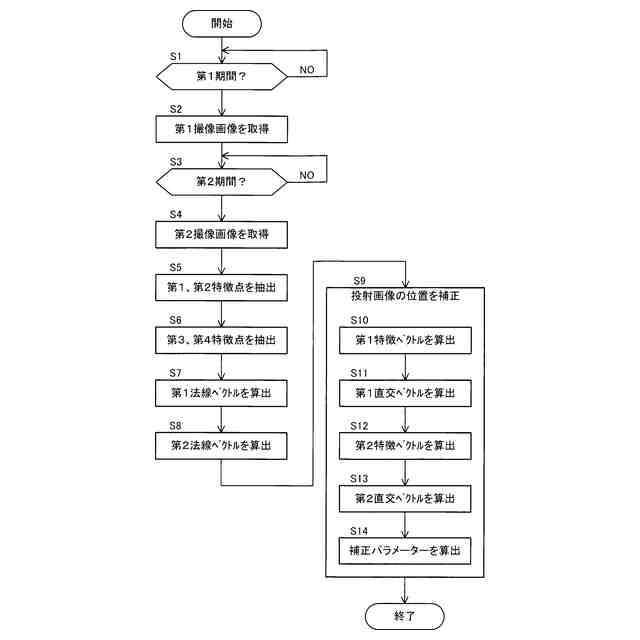
【解決手段】補正方法は、第1期間において投射画像および平面を撮像した第1撮像画像を取得することと、第1期間よりも後の第2期間において投射画像および平面を撮像した第2撮像画像を取得することと、第1撮像画像における平面の第1特徴点と第2特徴点とを抽出することと、第2撮像画像における平面の第1特徴点に対応する第3特徴点と第2特徴点に対応する第4特徴点とを抽出することと、第1期間における平面の第1法線ベクトルを算出することと、第2期間における平面の第2法線ベクトルを算出することと、第1特徴点、第2特徴点および第1法線ベクトルの組と、第3特徴点、第4特徴点および第2法線ベクトルの組と、に基づいて、第2期間における平面に対する投射画像の位置を、第1期間における平面に対する投射画像の位置に補正することと、を含む。
【選択図】図3
特許請求の範囲
【請求項1】
プロジェクターによって平面に投射された投射画像を補正する補正方法であって、
第1期間において撮像装置によって前記投射画像および前記平面を撮像した第1撮像画像を取得することと、
前記第1期間よりも後の第2期間において前記撮像装置によって前記投射画像および前記平面を撮像した第2撮像画像を取得することと、
前記第1撮像画像における前記平面の第1特徴点と第2特徴点とを抽出することと、
前記第2撮像画像における前記平面の前記第1特徴点に対応する第3特徴点と前記第2特徴点に対応する第4特徴点とを抽出することと、
前記第1期間における前記平面の法線ベクトルである第1法線ベクトルを算出することと、
前記第2期間における前記平面の法線ベクトルである第2法線ベクトルを算出することと、
前記第1特徴点、前記第2特徴点および前記第1法線ベクトルの組と、前記第3特徴点、前記第4特徴点および前記第2法線ベクトルの組と、に基づいて、前記第2期間における前記平面に対する前記投射画像の位置を、前記第1期間における前記平面に対する前記投射画像の位置に補正することと、を含む、
補正方法。
続きを表示(約 1,700 文字)
【請求項2】
前記第1特徴点から前記第2特徴点に向かうベクトルである第1特徴ベクトルを算出することと、
前記第1法線ベクトルと前記第1特徴ベクトルとの両方に直交する第1直交ベクトルを算出することと、
前記第3特徴点から前記第4特徴点に向かうベクトルである第2特徴ベクトルを算出することと、
前記第2法線ベクトルと前記第2特徴ベクトルとの両方に直交する第2直交ベクトルを算出することと、を含み、
前記第1法線ベクトルと前記第2法線ベクトルとの差、前記第1特徴ベクトルと前記第2特徴ベクトルとの差、および前記第1直交ベクトルと前記第2直交ベクトルとの差に基づいて、前記第2期間における前記平面に対する前記投射画像の位置を前記第1期間における前記平面に対する前記投射画像の位置に補正する、
請求項1に記載の補正方法。
【請求項3】
前記第1法線ベクトルと前記第2法線ベクトルと前記第1特徴ベクトルと前記第2特徴ベクトルと前記第1直交ベクトルと前記第2直交ベクトルとのそれぞれは、大きさを1に規格化した正規化ベクトルである、
請求項2に記載の補正方法。
【請求項4】
前記第1特徴点および前記第3特徴点は、前記平面に取り外し可能に設置された第1物理マーカーからの反射光に基づき抽出され、
前記第2特徴点および前記第4特徴点は、前記平面に取り外し可能に設置された第2物理マーカーからの反射光に基づき抽出される、
請求項1に記載の補正方法。
【請求項5】
平面に投射画像を投射するプロジェクターと、
前記平面および前記投射画像を撮像する撮像装置と、を備えるシステムであって、
前記プロジェクターは、
第1期間において前記撮像装置によって前記投射画像および前記平面を撮像した第1撮像画像を取得することと、
前記第1期間よりも後の第2期間において前記撮像装置によって前記投射画像および前記平面を撮像した第2撮像画像を取得することと、
前記第1撮像画像における前記平面の第1特徴点と第2特徴点とを抽出することと、
前記第2撮像画像における前記平面の前記第1特徴点に対応する第3特徴点と前記第2特徴点に対応する第4特徴点とを抽出することと、
前記第1期間における前記平面の法線ベクトルである第1法線ベクトルを算出することと、
前記第2期間における前記平面の法線ベクトルである第2法線ベクトルを算出することと、
前記第1特徴点、前記第2特徴点および前記第1法線ベクトルの組と、前記第3特徴点、前記第4特徴点および前記第2法線ベクトルの組と、に基づいて、前記第2期間における前記平面に対する前記投射画像の位置を、前記第1期間における前記平面に対する前記投射画像の位置に補正することと、を実行する、
システム。
【請求項6】
プロジェクターによって平面に投射された投射画像を補正するためのプログラムであって、
第1期間において撮像装置によって前記投射画像および前記平面を撮像した第1撮像画像を取得することと、
前記第1期間よりも後の第2期間において前記撮像装置によって前記投射画像および前記平面を撮像した第2撮像画像を取得することと、
前記第1撮像画像における前記平面の第1特徴点と第2特徴点とを抽出することと、
前記第2撮像画像における前記平面の前記第1特徴点に対応する第3特徴点と前記第2特徴点に対応する第4特徴点とを抽出することと、
前記第1期間における前記平面の法線ベクトルである第1法線ベクトルを算出することと、
前記第2期間における前記平面の法線ベクトルである第2法線ベクトルを算出することと、
前記第1特徴点、前記第2特徴点および前記第1法線ベクトルの組と、前記第3特徴点、前記第4特徴点および前記第2法線ベクトルの組と、に基づいて、前記第2期間における前記平面に対する前記投射画像の位置を、前記第1期間における前記平面に対する前記投射画像の位置に補正することと、をコンピューターに実行させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、補正方法、システムおよびプログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
例えば、特許文献1には、第1期間に撮影された第1撮像画像において抽出された4つ以上の第1特徴点と、第2期間に撮影された第2撮像画像において抽出された4つ以上の第2特徴点と、に基づいて射影変換パラメーターを導出するプロジェクターが開示されている。この射影変換パラメーターは、投写面と投写画像との位置関係を、装置本体が動く前、例えば第1期間における初期位置関係に戻すための変換行列であるパネル変換パラメーターを導出するために用いられる。
【先行技術文献】
【特許文献】
【0003】
特開2022-092169号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、投写面が平面である場合であっても、4つ以上の第1特徴点と4つ以上の第2特徴点とが射影変換パラメーターの導出に必要であるが、障害物の存在、撮像装置の画角、スクリーン形状等によっては、4点の特徴点を見つけることが難しい場合がある。
【課題を解決するための手段】
【0005】
本開示の一態様に係る補正方法は、プロジェクターによって平面に投射された投射画像を補正する補正方法であって、第1期間において撮像装置によって前記投射画像および前記平面を撮像した第1撮像画像を取得することと、前記第1期間よりも後の第2期間において前記撮像装置によって前記投射画像および前記平面を撮像した第2撮像画像を取得することと、前記第1撮像画像における前記平面の第1特徴点と第2特徴点とを抽出することと、前記第2撮像画像における前記平面の前記第1特徴点に対応する第3特徴点と前記第2特徴点に対応する第4特徴点とを抽出することと、前記第1期間における前記平面の法線ベクトルである第1法線ベクトルを算出することと、前記第2期間における前記平面の法線ベクトルである第2法線ベクトルを算出することと、前記第1特徴点、前記第2特徴点および前記第1法線ベクトルの組と、前記第3特徴点、前記第4特徴点および前記第2法線ベクトルの組と、に基づいて、前記第2期間における前記平面に対する前記投射画像の位置を、前記第1期間における前記平面に対する前記投射画像の位置に補正することと、を含む。
【0006】
本開示の一態様に係るシステムは、平面に投射画像を投射するプロジェクターと、前記平面および前記投射画像を撮像する撮像装置と、を備えるシステムであって、前記プロジェクターは、第1期間において前記撮像装置によって前記投射画像および前記平面を撮像した第1撮像画像を取得することと、前記第1期間よりも後の第2期間において前記撮像装置によって前記投射画像および前記平面を撮像した第2撮像画像を取得することと、前記第1撮像画像における前記平面の第1特徴点と第2特徴点とを抽出することと、前記第2撮像画像における前記平面の前記第1特徴点に対応する第3特徴点と前記第2特徴点に対応する第4特徴点とを抽出することと、前記第1期間における前記平面の法線ベクトルである第1法線ベクトルを算出することと、前記第2期間における前記平面の法線ベクトルである第2法線ベクトルを算出することと、前記第1特徴点、前記第2特徴点および前記第1法線ベクトルの組と、前記第3特徴点、前記第4特徴点および前記第2法線ベクトルの組と、に基づいて、前記第2期間における前記平面に対する前記投射画像の位置を、前記第1期間における前記平面に対する前記投射画像の位置に補正することと、を実行する。
【0007】
本開示の一態様に係るプログラムは、プロジェクターによって平面に投射された投射画像を補正するためのプログラムであって、第1期間において撮像装置によって前記投射画像および前記平面を撮像した第1撮像画像を取得することと、前記第1期間よりも後の第2期間において前記撮像装置によって前記投射画像および前記平面を撮像した第2撮像画像を取得することと、前記第1撮像画像における前記平面の第1特徴点と第2特徴点とを抽出することと、前記第2撮像画像における前記平面の前記第1特徴点に対応する第3特徴点と前記第2特徴点に対応する第4特徴点とを抽出することと、前記第1期間における前記平面の法線ベクトルである第1法線ベクトルを算出することと、前記第2期間における前記平面の法線ベクトルである第2法線ベクトルを算出することと、前記第1特徴点、前記第2特徴点および前記第1法線ベクトルの組と、前記第3特徴点、前記第4特徴点および前記第2法線ベクトルの組と、に基づいて、前記第2期間における前記平面に対する前記投射画像の位置を、前記第1期間における前記平面に対する前記投射画像の位置に補正することと、をコンピューターに実行させる。
【図面の簡単な説明】
【0008】
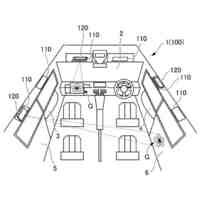
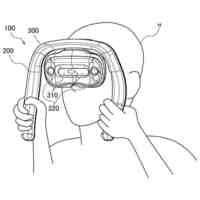
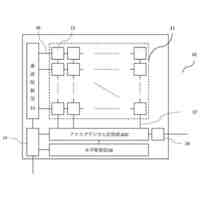
実施形態に係る補正方法に用いるシステムの概略を示す図である。
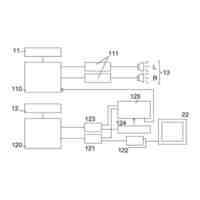
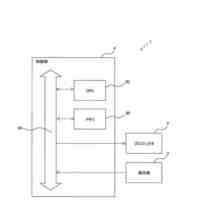
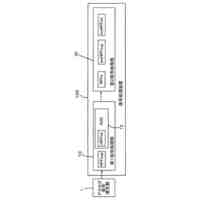
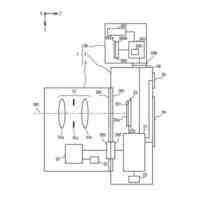
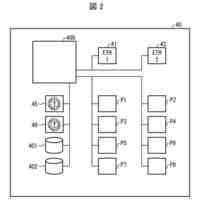
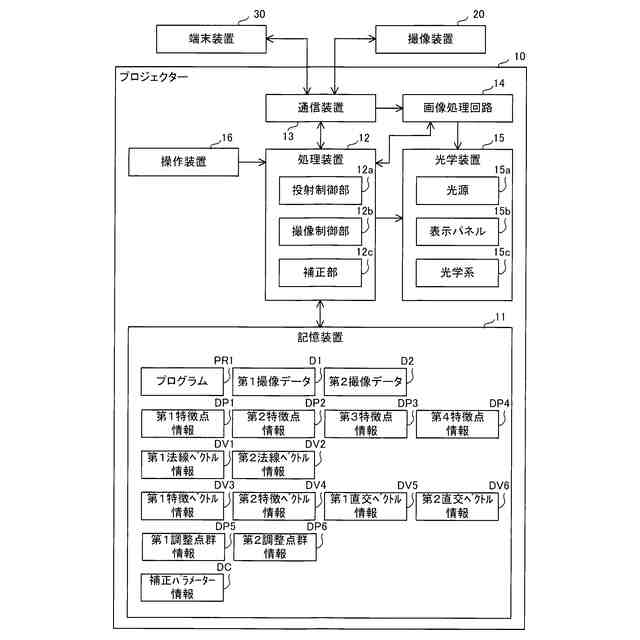
実施形態に係るシステムに用いるプロジェクターのブロック図である。
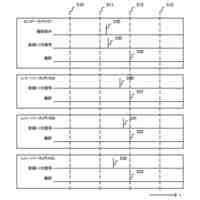
実施形態に係る補正方法の流れを示すフローチャートである。
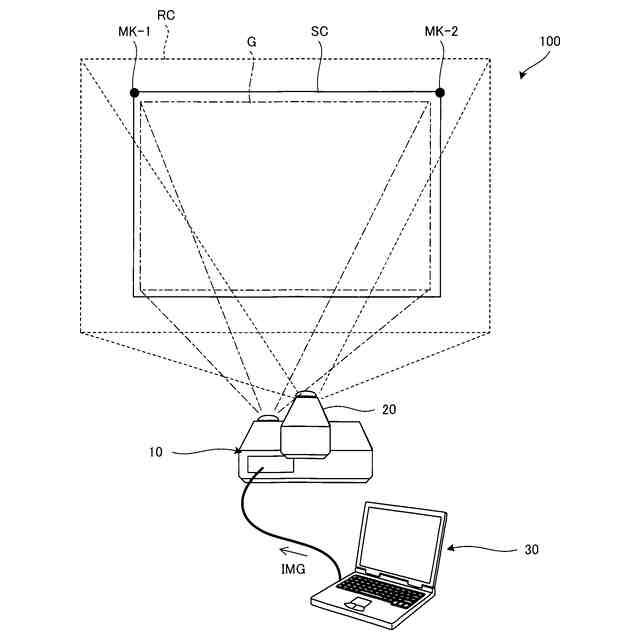
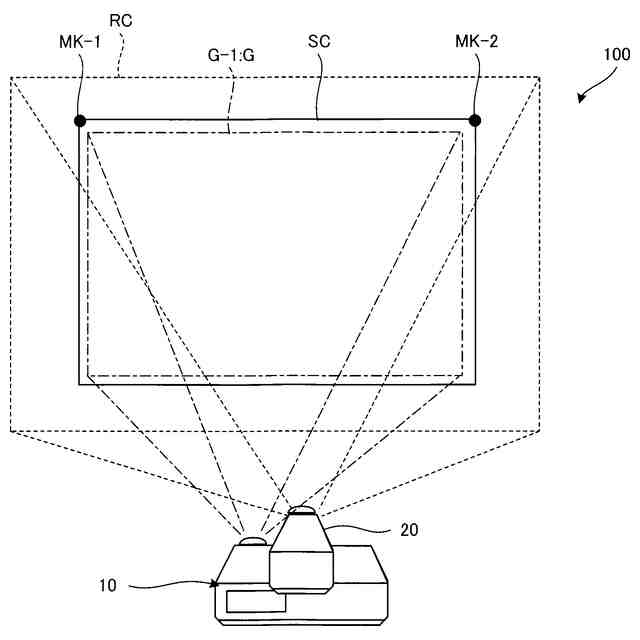
第1撮像画像の取得を説明するための図である。
第1撮像画像を説明するための図である。
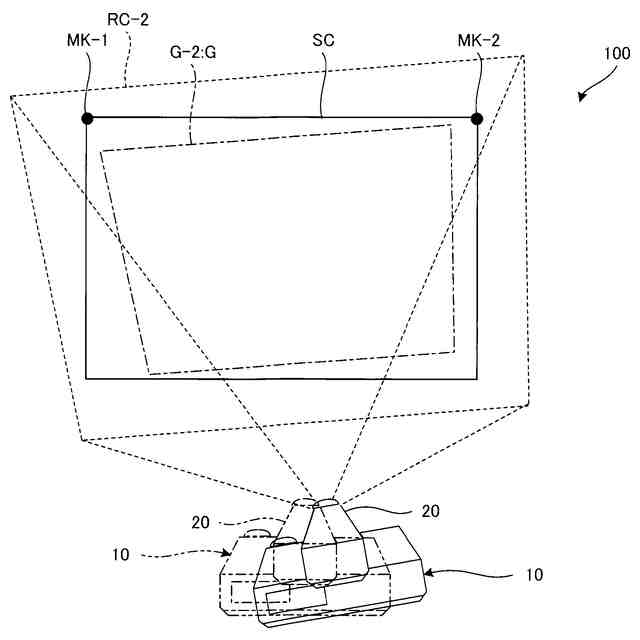
第2撮像画像の取得を説明するための図である。
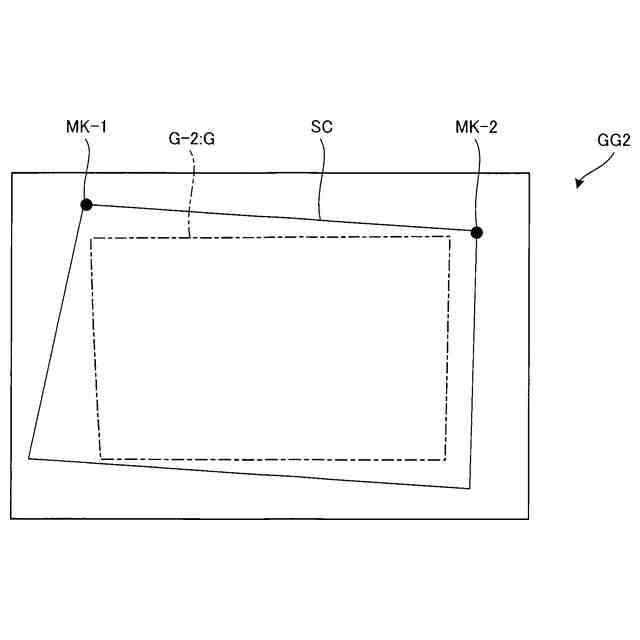
第2撮像画像を説明するための図である。
第1特徴点と第2特徴点と第3特徴点と第4特徴点との関係を説明するための図である。
投射画像の位置の補正を説明するための図である。
【発明を実施するための形態】
【0009】
以下、添付図面を参照しながら本開示に係る好適な実施形態を説明する。なお、図面において各部の寸法および縮尺は実際と適宜に異なり、理解を容易にするために模式的に示している部分もある。また、本開示の範囲は、以下の説明において特に本開示を限定する旨の記載がない限り、これらの形態に限られない。
【0010】
1.第1実施形態
1-1.システムの概要
図1は、実施形態に係る補正方法に用いるシステム100の概略を示す図である。システム100は、投射画像Gを投射面SCに投射するプロジェクションシステムである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
携帯端末保持具
3か月前
個人
音響装置
3か月前
個人
店内配信予約システム
29日前
サクサ株式会社
中継装置
1か月前
日本無線株式会社
音声通信方式
3か月前
日本精機株式会社
投影システム
3か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
電子機器
28日前
日本精機株式会社
車両用表示装置
2か月前
キヤノン株式会社
通信装置
2か月前
キヤノン電子株式会社
モバイル装置
1か月前
キヤノン電子株式会社
画像読取装置
3か月前
ヤマハ株式会社
音響出力装置
3か月前
日本精機株式会社
画像投映システム
1か月前
ヤマハ株式会社
信号処理装置
1か月前
株式会社リコー
画像形成装置
6日前
個人
補聴器のイヤピース耳穴挿入具
2か月前
電気興業株式会社
無線中継器
1か月前
キヤノン電子株式会社
画像読取装置
3か月前
ヤマハ株式会社
音響出力装置
3か月前
リオン株式会社
電気機械変換器
2か月前
キヤノン株式会社
画像処理装置
2か月前
ブラザー工業株式会社
読取装置
1日前
株式会社ニコン
撮像装置
16日前
キヤノン株式会社
画像表示装置
2か月前
オムロン株式会社
スレーブ装置
3か月前
キヤノン株式会社
映像表示装置
3か月前
キヤノン株式会社
通信システム
2か月前
株式会社ヴィーネックス
カメラ
2か月前
キヤノン株式会社
撮影システム
2か月前
株式会社シグマ
撮像素子及び撮像装置
3か月前
キヤノン株式会社
画像読取装置
3か月前
日本放送協会
映像伝送システム
3か月前
キヤノン株式会社
画像処理装置
3か月前
シャープ株式会社
表示装置
2か月前
キヤノン電子株式会社
シート材搬送装置
2日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ