TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025115755
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2024010388
出願日
2024-01-26
発明の名称
走行制御装置、走行制御方法、及びプログラム
出願人
本田技研工業株式会社
代理人
弁理士法人航栄事務所
主分類
B62D
6/00 20060101AFI20250731BHJP(鉄道以外の路面車両)
要約
【課題】路面のカントの傾斜方向が急変化する場合に、路面のカントによる目標軌道からの車両の逸脱を抑制できる走行制御装置、走行制御方法、及びプログラムを提供する。
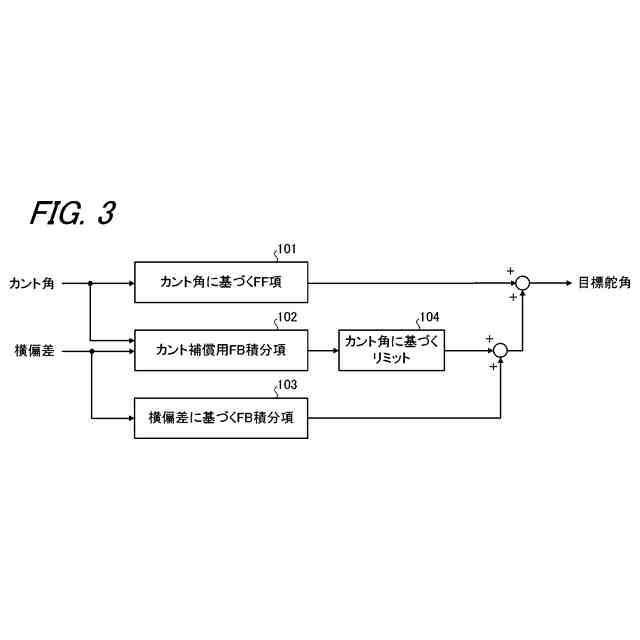
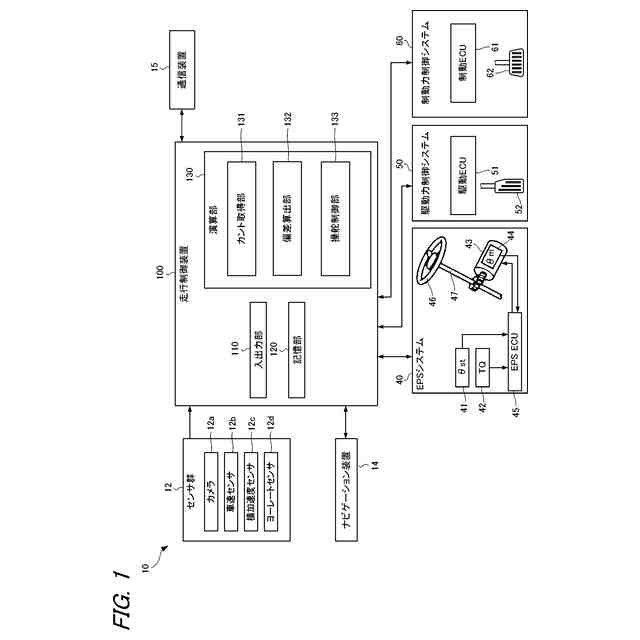
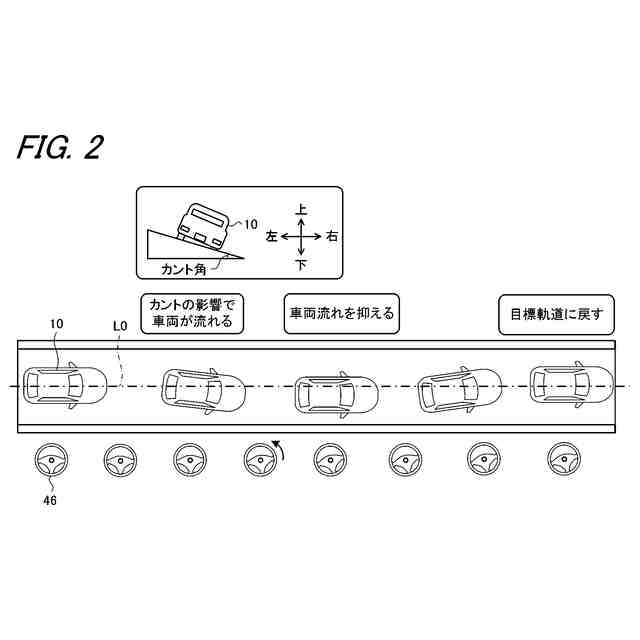
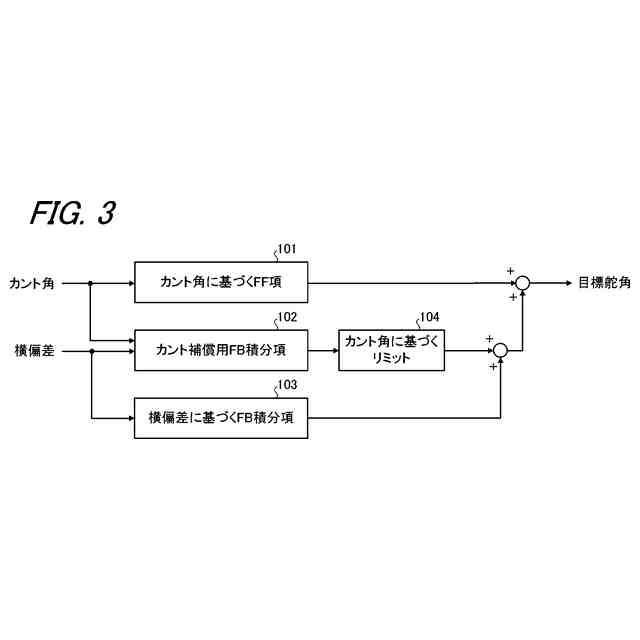
【解決手段】走行制御装置100は、目標軌道L0に沿うように車両10の走行を制御する。走行制御装置100は、車両10が走行するカント路のカント角を取得するカント取得部131と、横方向における目標軌道L0の位置と車両10の位置との横偏差を算出する偏差算出部132と、カント角と横偏差とに基づいて車両10の目標舵角を算出し、該目標舵角に追従するように車両10の操舵を制御する操舵制御部133と、を備え、カント角及び横偏差に基づき算出された目標舵角のFB積分項102には、カント角に応じて可変に設定されたリミット104が設けられている。
【選択図】図3
特許請求の範囲
【請求項1】
目標軌道に沿うように車両の走行を制御する走行制御装置であって、
前記車両が走行する路面の横方向の傾斜度合いを示すカント角を取得するカント取得部と、
前記横方向における前記目標軌道の位置と前記車両の位置との横偏差を算出する偏差算出部と、
前記カント角と前記横偏差とに基づいて前記車両の目標舵角を算出し、該目標舵角に追従するように前記車両の操舵を制御する制御部と、を備え、
前記カント角及び前記横偏差に基づき算出された前記目標舵角のフィードバック項には、前記カント角に応じて可変に設定されたリミットが設けられている、
走行制御装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の走行制御装置であって、
前記リミットは、
前記カント角に応じて可変に設定され、前記車両に関する所定の情報に基づき算出されたヨーレート上限値と、
前記車両のヨーレートの方向が前記路面の下り傾斜方向に一致しない条件と、
に基づいて設定される、
走行制御装置。
【請求項3】
請求項2に記載の走行制御装置であって、
前記ヨーレート上限値は、前記車両の速度に基づいて算出される、
走行制御装置。
【請求項4】
請求項2に記載の走行制御装置であって、
前記ヨーレート上限値は、前記車両の諸元情報に基づいて算出される、
走行制御装置。
【請求項5】
請求項1に記載の走行制御装置であって、
前記制御部は、前記路面のカントに基づく前記横方向の前記車両の移動が検出されたときに、前記リミットを設定する、
走行制御装置。
【請求項6】
請求項1に記載の走行制御装置であって、
前記カント取得部は、前記車両の横加速度を検出するセンサによる検出結果、前記路面の傾斜を検出するセンサによる検出結果、及び地図情報の少なくとも一つに基づいて、前記カント角を取得する、
走行制御装置。
【請求項7】
請求項1から6のいずれか1項に記載の走行制御装置であって、
前記制御部は、前記カント角に基づいて算出されるフィードフォワード項に対して、前記カント角及び前記横偏差に基づいて算出され、前記リミットが設けられた前記フィードバック項を加算することにより、前記目標舵角を算出する、
走行制御装置。
【請求項8】
目標軌道に沿うように車両の走行を制御する走行制御方法であって、
前記車両が走行する路面の横方向の傾斜度合いを示すカント角を取得するカント取得ステップと、
前記横方向における前記目標軌道の位置と前記車両の位置との横偏差を算出する偏差算出ステップと、
前記カント角と前記横偏差とに基づいて前記車両の目標舵角を算出し、該目標舵角に追従するように前記車両の操舵を制御する操舵制御ステップと、を備え、
前記カント角及び前記横偏差に基づき算出された前記目標舵角のフィードバック項には、前記カント角に応じて可変に設定されたリミットが設けられている、
走行制御方法。
【請求項9】
目標軌道に沿うように車両の走行を制御するプログラムであって、
前記車両が走行する路面の横方向の傾斜度合いを示すカント角を取得するカント取得ステップと、
前記横方向における前記目標軌道の位置と前記車両の位置との横偏差を算出する偏差算出ステップと、
前記カント角と前記横偏差とに基づいて前記車両の目標舵角を算出し、該目標舵角に追従するように前記車両の操舵を制御する操舵制御ステップと、
をコンピュータに実行させ、
前記カント角及び前記横偏差に基づき算出された前記目標舵角のフィードバック項には、前記カント角に応じて可変に設定されたリミットが設けられている、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、目標軌道に沿うように車両の走行を制御する走行制御装置、走行制御方法、及びプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて運転支援技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。運転支援技術として、車両が車線の中央付近を走行するように運転手の操舵操作を支援する車線維持支援が知られている。
【0003】
例えば、特許文献1には、自車両を目標走行ラインに沿って走行させるように操舵支援制御を実行する車両用操舵支援装置が記載されている。特に特許文献1には、走行路面が非カント路面からカント路面に切り替わったと判定された直後のカント切り替わり期間中において、自車両の横偏差を積分して設定される積分制御項の制御ゲインを、通常値よりも高い値に設定することが記載されている。
【0004】
また、特許文献2には、自車両が車線変更のための目標走行軌跡を走行するように自車両の操舵を制御する車両制御装置が記載されている。特に特許文献2には、車両制御装置が、自車線の幅方向における路面の勾配を示す自車線勾配と、自車線の車線変更先となる隣接車線の幅方向における路面の勾配を示す隣接車線勾配とに基づいて目標舵角を補正し、補正された目標舵角に追従するように操舵制御を行うことが記載されている。
【先行技術文献】
【特許文献】
【0005】
特許第7028115号公報
国際公開第2022/259552号
【発明の概要】
【発明が解決しようとする課題】
【0006】
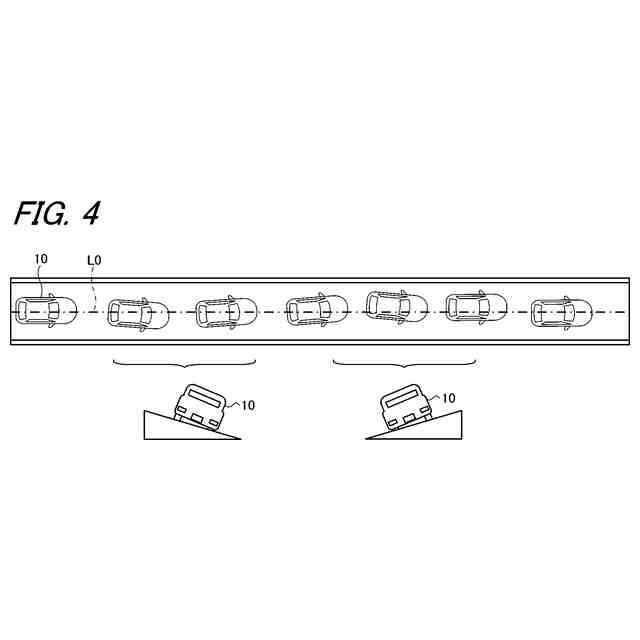
路面のカント角が急変化する場合、例えば、路面の傾斜方向が右方向から左方向、又は左方向から右方向に急変化する場合、カントにより車両が流れる方向に操舵が残った状態が発生し、目標軌道から車両が逸脱する虞がある。
【0007】
特許文献1では、積分制御項の制御ゲインを通常値よりも高い値に設定するタイミングは非カント路面からカント路面に切り替わったと判定された直後であるので、カントの傾斜方向が急変化した場合には車両の逸脱の虞が依然として残る。また、特許文献2では、地図データベースから事前に得られた路面の勾配情報に基づいた目標舵角の補正を行うので、カントの傾斜方向の急変化に対応したものではない。このようなカント角の急変化に対して、目標軌道からの車両の逸脱を抑制する点について検討の余地があった。
【0008】
本発明は、路面のカント角が急変化する場合に、路面のカントによる目標軌道からの車両の逸脱を抑制できる走行制御装置、走行制御方法、及びプログラムを提供する。そして、延いては持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0009】
本発明は、
目標軌道に沿うように車両の走行を制御する走行制御装置であって、
前記車両が走行する路面の横方向の傾斜度合いを示すカント角を取得するカント取得部と、
前記横方向における前記目標軌道の位置と前記車両の位置との横偏差を算出する偏差算出部と、
前記カント角と前記横偏差とに基づいて前記車両の目標舵角を算出し、該目標舵角に追従するように前記車両の操舵を制御する制御部と、を備え、
前記カント角及び前記横偏差に基づき算出された前記目標舵角のフィードバック項には、前記カント角に応じて可変に設定されたリミットが設けられている。
【0010】
また、本発明は、
目標軌道に沿うように車両の走行を制御する走行制御方法であって、
前記車両が走行する路面の横方向の傾斜度合いを示すカント角を取得するカント取得ステップと、
前記横方向における前記目標軌道の位置と前記車両の位置との横偏差を算出する偏差算出ステップと、
前記カント角と前記横偏差とに基づいて前記車両の目標舵角を算出し、該目標舵角に追従するように前記車両の操舵を制御する操舵制御ステップと、を備え、
前記カント角及び前記横偏差に基づき算出された前記目標舵角のフィードバック項には、前記カント角に応じて可変に設定されたリミットが設けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
車両
1か月前
本田技研工業株式会社
板ばね
1日前
本田技研工業株式会社
回転電機
1か月前
本田技研工業株式会社
回転電機
9日前
本田技研工業株式会社
ロボット
1日前
本田技研工業株式会社
車両構造
1か月前
本田技研工業株式会社
回転電機
9日前
本田技研工業株式会社
制御装置
1か月前
本田技研工業株式会社
制御装置
1か月前
本田技研工業株式会社
積層装置
今日
本田技研工業株式会社
電池パック
3日前
本田技研工業株式会社
鞍乗型車両
23日前
本田技研工業株式会社
運転評価装置
8日前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
画像処理装置
7日前
本田技研工業株式会社
温調システム
1か月前
本田技研工業株式会社
情報提供装置
2日前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
情報提供装置
2日前
本田技研工業株式会社
電動駆動装置
9日前
本田技研工業株式会社
電気駆動装置
9日前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
電動駆動装置
9日前
本田技研工業株式会社
電動駆動装置
9日前
本田技研工業株式会社
固体二次電池
15日前
本田技研工業株式会社
着座部材構造
1か月前
本田技研工業株式会社
鞍乗り型車両
1か月前
本田技研工業株式会社
位置決め装置
今日
本田技研工業株式会社
蓄電システム
17日前
本田技研工業株式会社
体幹用装着具
4日前
本田技研工業株式会社
保険料算出装置
8日前
本田技研工業株式会社
非水電解質電池
29日前
本田技研工業株式会社
着用物着脱装置
1か月前
本田技研工業株式会社
通話サポート装置
29日前
本田技研工業株式会社
燃料電池システム
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ