TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025118474
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024082076
出願日
2024-05-20
発明の名称
車輪アセンブリ及び可動電子装置
出願人
緯創資通股ふん有限公司
,
WISTRON CORPORATION
代理人
個人
,
個人
,
個人
主分類
B60B
33/00 20060101AFI20250805BHJP(車両一般)
要約
【課題】従動輪がサービスロボットの小型化を達成するために小さな径を有しつつも障害物に乗り上げる能力に優れることを可能とする車輪アセンブリ及び可動電子装置を提供する。
【解決手段】車輪アセンブリは、フレームと、少なくとも1つの可動輪と、少なくとも1つのガイド輪と、を含む。フレームは、相互に接続された台座部及び支持部を含む。可動輪は支持部に回転可能に配置され、可動輪は台座部とは反対側に位置する第1のエッジを有する。ガイド輪は、支持部に回転可能に配置される。ガイド輪は台座部とは反対側に位置する第2のエッジを有し、ガイド輪の第2のエッジは可動輪の第1のエッジよりも台座部の近くに位置する。
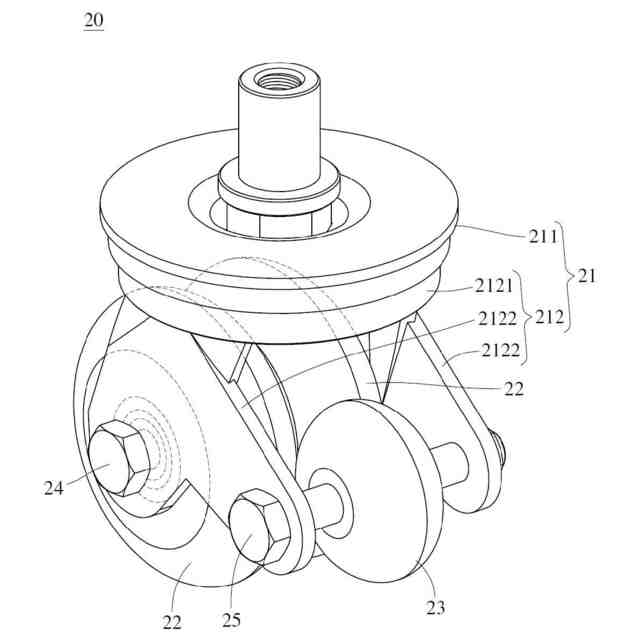
【選択図】図2
特許請求の範囲
【請求項1】
相互に接続された台座部及び支持部を備えるフレームと、
前記支持部に回転可能に配置された少なくとも1つの可動輪であって、前記台座部とは反対側に位置する第1のエッジを有する少なくとも1つの可動輪と、
前記支持部に回転可能に配置された少なくとも1つのガイド輪であって、該少なくとも1つのガイド輪は前記台座部とは反対側に位置する第2のエッジを有し、前記少なくとも1つのガイド輪の前記第2のエッジが前記少なくとも1つの可動輪の前記第1のエッジよりも前記台座部の近くに位置する、少なくとも1つのガイド輪と、
を備える車輪アセンブリ。
続きを表示(約 1,100 文字)
【請求項2】
前記少なくとも1つのガイド輪の前記第2のエッジから前記台座部までの距離が前記少なくとも1つの可動輪の回転軸から前記台座部までの距離よりも長く、(1)前記少なくとも1つのガイド輪の回転軸は前記少なくとも1つの可動輪の前記回転軸よりも前記台座部の近くに位置し、(2)前記少なくとも1つの可動輪の前記回転軸から前記台座部までの距離が前記少なくとも1つのガイド輪の前記回転軸から前記台座部までの距離に実質的に等しく、又は(3)前記少なくとも1つのガイド輪の前記回転軸は前記少なくとも1つの可動輪の前記回転軸よりも前記台座部から離れて位置する、請求項1に記載の車輪アセンブリ。
【請求項3】
本体と、
前記本体の異なる位置にそれぞれ配置された複数の車輪アセンブリであって、各々が、
相互に接続された台座部及び支持部を備えるフレームであって、前記台座部が前記本体に取り付けられた、フレームと、
前記支持部に回転可能に配置された可動輪であって、前記台座部とは反対側に位置する第1のエッジを有する可動輪と、
前記支持部に回転可能に配置されたガイド輪であって、該ガイド輪は前記台座部とは反対側に位置する第2のエッジを有し、前記ガイド輪の前記第2のエッジが前記可動輪の前記第1のエッジよりも前記台座部の近くに位置する、ガイド輪と、
を備える複数の車輪アセンブリと、
を備える可動電子装置。
【請求項4】
前記支持部は前記台座部に回転可能に配置され、前記ガイド輪は、前記支持部を介して前記台座部に対して回転される前記可動輪によって形成される回転範囲内に位置する、請求項3に記載の可動電子装置。
【請求項5】
本体と、
前記本体に配置された駆動源と、
前記駆動源に接続された駆動輪と、
前記本体の異なる位置にそれぞれ配置された複数の車輪アセンブリであって、各々が、
相互に接続された台座部及び支持部を備えるフレームであって、前記台座部が前記本体に取り付けられた、フレームと、
前記支持部に回転可能に配置された可動輪であって、前記台座部とは反対側に位置する第1のエッジを有する可動輪と、
前記支持部に回転可能に配置されたガイド輪であって、該ガイド輪は前記台座部とは反対側に位置する第2のエッジを有し、前記ガイド輪の前記第2のエッジが前記可動輪の前記第1のエッジよりも前記台座部の近くに位置する、ガイド輪と、
を備える複数の車輪アセンブリと、
を備え、
前記駆動源が、前記複数の車輪アセンブリを駆動するように、前記駆動輪を駆動して前記本体を移動させるように構成された、可動電子装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車輪アセンブリ及び可動電子装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
自律型移動ロボット又は自動化誘導車両などのサービスロボットは一般に狭い環境を走行することがあるため、圧迫感を与えないために小型となるように設計される。
【0003】
サービスロボットを小型化するために、そのシャーシを小型化することが必要であり、小型のシャーシでは、転回する際に周囲の構成要素と干渉しないようにするために従動輪の回転半径を減少させる必要が生じる。従動輪の回転半径は、その外径及びその中心から従動輪の回転軸までの距離に依存する。したがって、基本的には、サービスロボットの従動輪の外径が小さいほど、サービスロボットが達成可能なサイズは小さくなる。しかし、従動輪の外径を減少させることによって、従動輪と障害物の間の接点が従動輪の中心に近くなり、これにより、従動輪に付与されるリフト力が減少する。そこで、どのようにして従動輪がサービスロボットの小型化を達成するための小さな径を有しつつも障害物に乗り上げる能力に優れることを可能とするかが、本技術分野における重要事項の1つとなる。
【発明の概要】
【0004】
本開示は、従動輪がサービスロボットの小型化を達成するために小さな径を有しつつも障害物に乗り上げる能力に優れることを可能とする車輪アセンブリ及び可動電子装置を提供する。
【0005】
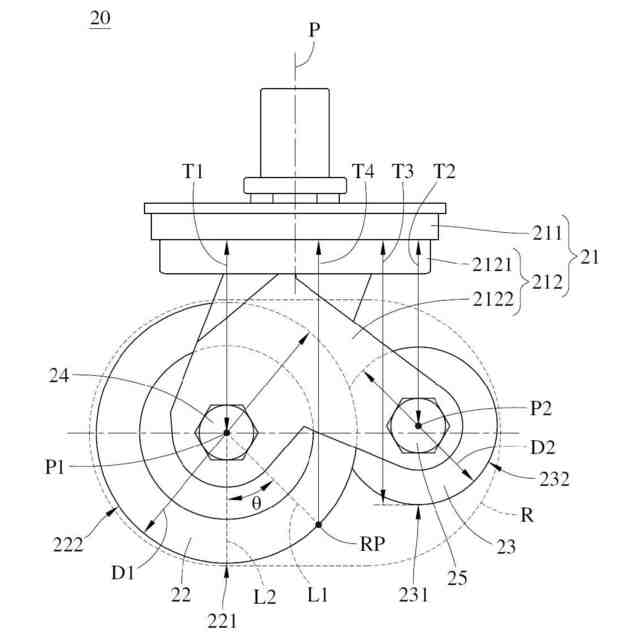
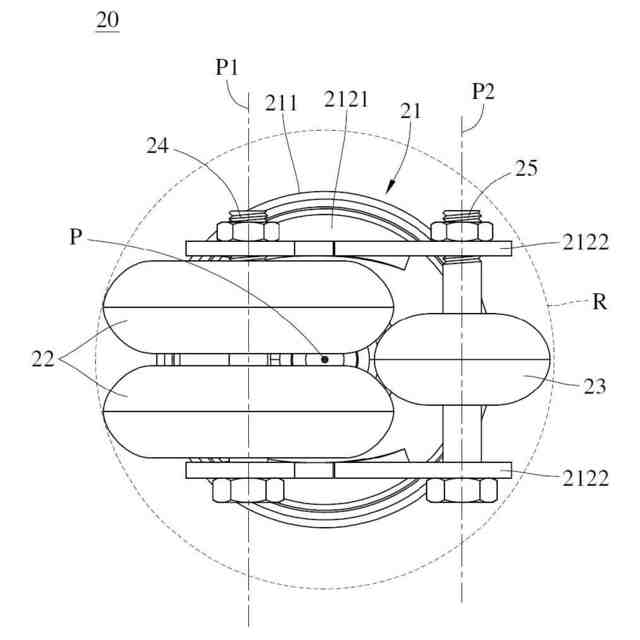
本開示の一実施形態は、車輪アセンブリを提供する。車輪アセンブリは、フレーム、少なくとも1つの可動輪及び少なくとも1つのガイド輪を含む。フレームは、相互に接続された台座部及び支持部を含む。可動輪は支持部に回転可能に配置され、可動輪は台座部とは反対側に位置する第1のエッジを有する。ガイド輪は、支持部に回転可能に配置される。ガイド輪は、台座部とは反対側に位置する第2のエッジを有し、ガイド輪の第2のエッジは可動輪の第1のエッジよりも台座部の近くに位置する。
【0006】
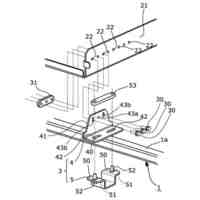
本開示の他の実施形態は、可動電子装置を提供する。可動電子装置は、本体及び複数の車輪アセンブリを含む。車輪アセンブリは、本体の異なる位置にそれぞれ配置され、各々がフレーム、可動輪及びガイド輪を含む。フレームは相互に接続された台座部及び支持部を含み、台座部は本体に取り付けられる。可動輪は支持部に回転可能に配置され、可動輪は台座部とは反対側に位置する第1のエッジを有する。ガイド輪は、支持部に対して回転可能に配置される。ガイド輪は、台座部とは反対側に位置する第2のエッジを有し、ガイド輪の第2のエッジは可動輪の第1のエッジよりも台座部の近くに位置する。
【0007】
本開示のさらに他の実施形態は、可動電子装置を提供する。可動電子装置は、本体、駆動源、駆動輪及び複数の車輪アセンブリを含む。駆動源は、本体に配置される。駆動輪は、駆動源に接続される。車輪アセンブリは、本体の異なる位置にそれぞれ配置され、各々がフレーム、可動輪及びガイド輪を含む。フレームは相互に接続された台座部及び支持部を含み、台座部は本体に取り付けられる。可動輪は支持部に回転可能に配置され、可動輪は台座部とは反対側に位置する第1のエッジを有する。ガイド輪は、支持部に回転可能に配置される。ガイド輪は、台座部とは反対側に位置する第2のエッジを有し、ガイド輪の第2のエッジは可動輪の第1のエッジよりも台座部の近くに位置する。駆動源は、車輪アセンブリを駆動するように駆動輪を駆動して本体を移動させるように構成される。
【0008】
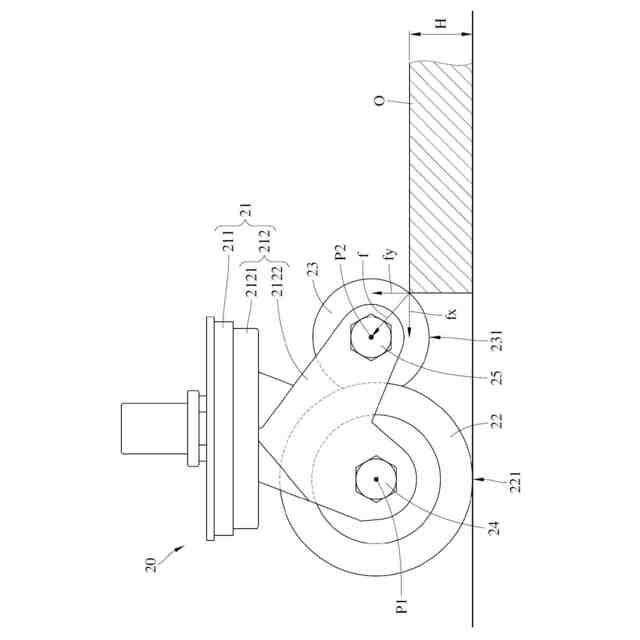
車輪アセンブリ及び可動電子装置によると、可動輪が障害物に接触する前にガイド輪が事前に障害物に接触して可動電子装置全体を上昇させることができるように、ガイド輪及び可動輪がフレームの支持部に回転可能に配置され、ガイド輪の第2のエッジが可動輪の第1のエッジよりもフレームの台座部の近くに位置する。したがって、障害物に接触する可動輪は、容易に障害物に乗り上げるように、より大きなリフト力を得ることができる。結果として、可動輪が可動電子装置の小型化要件のために小さな径を有する場合でも、ガイド輪によって、可動輪が障害物に乗り上げることが可能となる。
【図面の簡単な説明】
【0009】
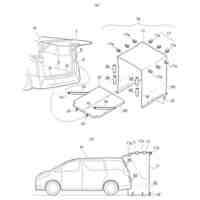
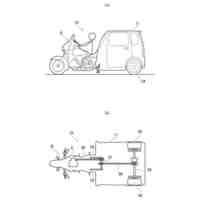
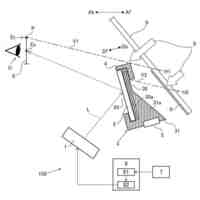
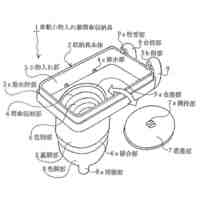
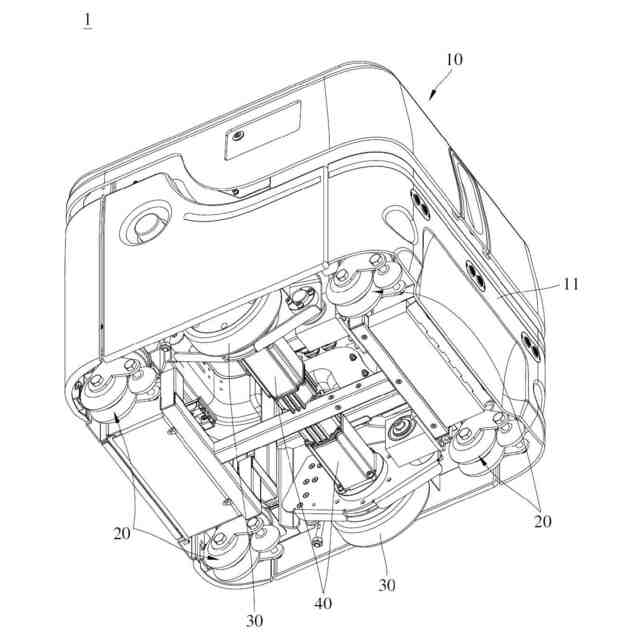
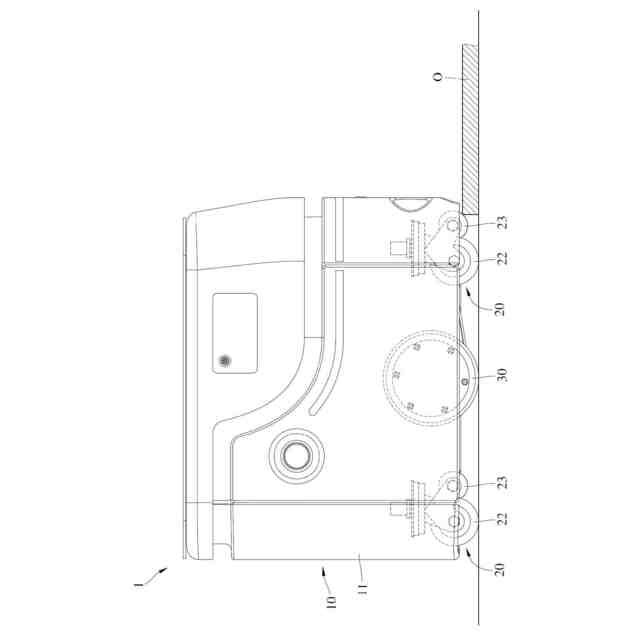
本開示の第1の実施形態に係る可動電子装置の斜視図である。
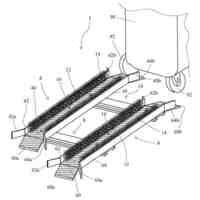
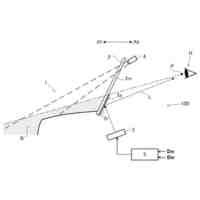
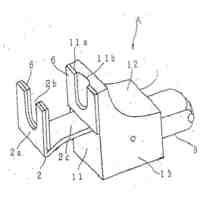
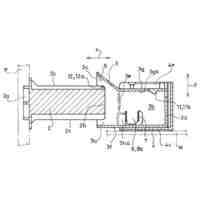
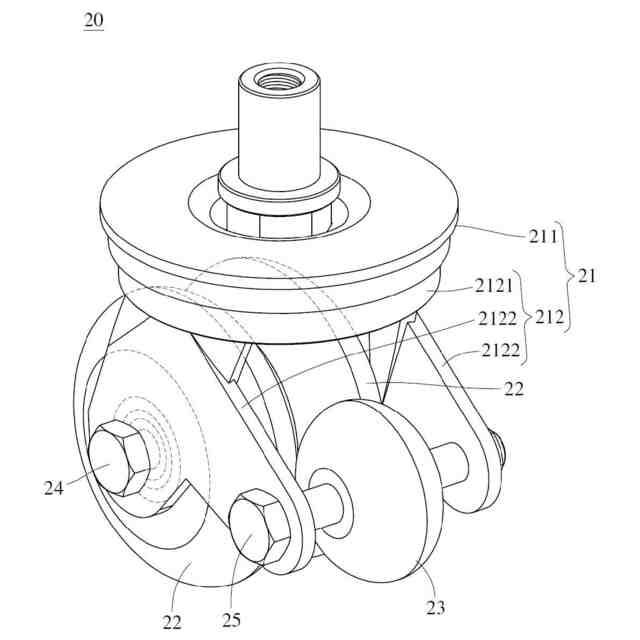
図1の車輪アセンブリの斜視図である。
図2の車輪アセンブリの側面図である。
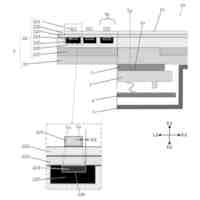
図2の車輪アセンブリの底面図である。
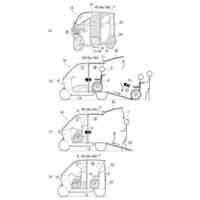
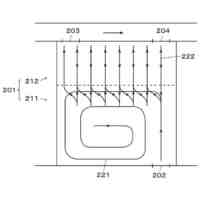
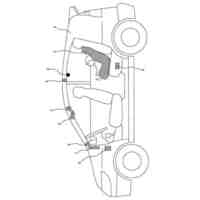
障害物と接触している場合の図1の可動電子装置の側面図である。
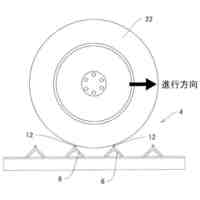
障害物と接触している場合の図5の車輪アセンブリのガイド輪の拡大図である。
障害物と接触している場合の図5の車輪アセンブリの可動輪の拡大図である。
図2のガイド輪の外径と、逆転力に対するリフト力の比との関係を示す曲線グラフである。
本開示の第2の実施形態に係る車輪アセンブリの側面図である。
図9のガイド輪の外径と、逆転力に対するリフト力の比との関係を示す曲線グラフである。
本開示の第3の実施形態に係る車輪アセンブリの側面図である。
図11のガイド輪の外径と、逆転力に対するリフト力の比との関係を示す曲線グラフである。
本開示の第4の実施形態に係る車輪アセンブリの斜視図である。
本開示の第5の実施形態に係る車輪アセンブリの斜視図である。
【発明を実施するための形態】
【0010】
本開示は、ここに与えられる詳細な説明及び添付図面からより深く理解されることになり、それらは説明としてのみ与えられ、したがって本開示を限定するものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
2か月前
個人
タイヤレバー
19日前
個人
車窓用防虫網戸
3か月前
個人
ホイルのボルト締結
1か月前
個人
ルーフ付きトライク
10日前
個人
車輪清掃装置
2か月前
日本精機株式会社
表示装置
今日
個人
キャンピングトライク
2か月前
井関農機株式会社
作業車両
2か月前
個人
車両通過構造物
20日前
日本精機株式会社
表示装置
17日前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
17日前
日本精機株式会社
表示装置
17日前
個人
アクセルのソフトウェア
1か月前
個人
ワイパーゴム性能保持具
2か月前
個人
乗合路線バスの客室装置
1か月前
個人
車両用スリップ防止装置
1か月前
個人
キャンピングトレーラー
2か月前
井関農機株式会社
収穫作業車両
3か月前
個人
音声ガイド、音声サービス
25日前
株式会社クラベ
ヒータユニット
3か月前
株式会社ニフコ
保持装置
1か月前
株式会社豊田自動織機
産業車両
14日前
日本精機株式会社
車載表示装置
1か月前
個人
車載小物入れ兼雨傘収納具
1か月前
個人
円湾曲ホイール及び球体輪
1か月前
井関農機株式会社
作業車両
3か月前
日本精機株式会社
車両用投影装置
2か月前
日本精機株式会社
車両用投影装置
2か月前
日本精機株式会社
車両用表示装置
10日前
井関農機株式会社
作業車両
2か月前
日本無線株式会社
取付金具
26日前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ