TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025119925
公報種別
公開特許公報(A)
公開日
2025-08-15
出願番号
2024015060
出願日
2024-02-02
発明の名称
機械システム
出願人
オークマ株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
G01D
5/347 20060101AFI20250807BHJP(測定;試験)
要約
【課題】スケールとスライダが非接触構造の光学式リニアエンコーダと、機械と、を備える機械システムにおいて、機械の固定部と可動部とが軸動作時に非接触状態の場合の電磁波ノイズの影響を受けてばたつく現象の発生を抑制する。
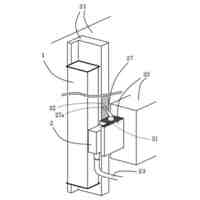
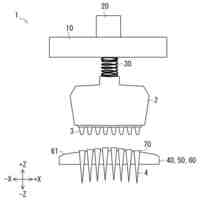
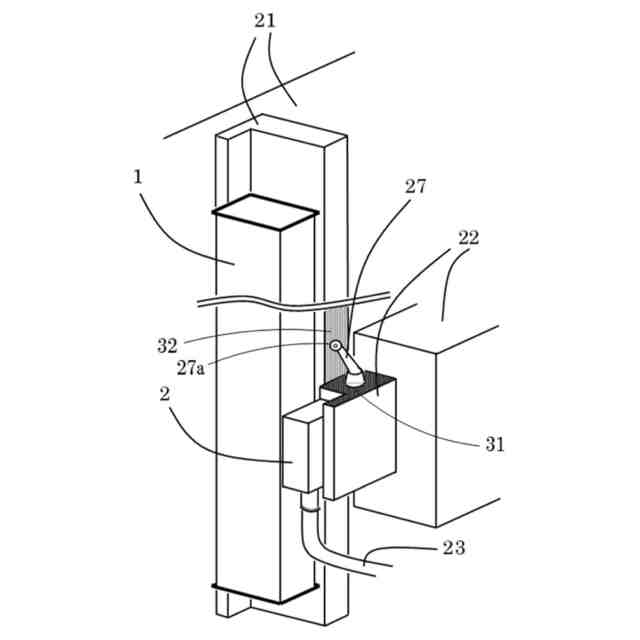
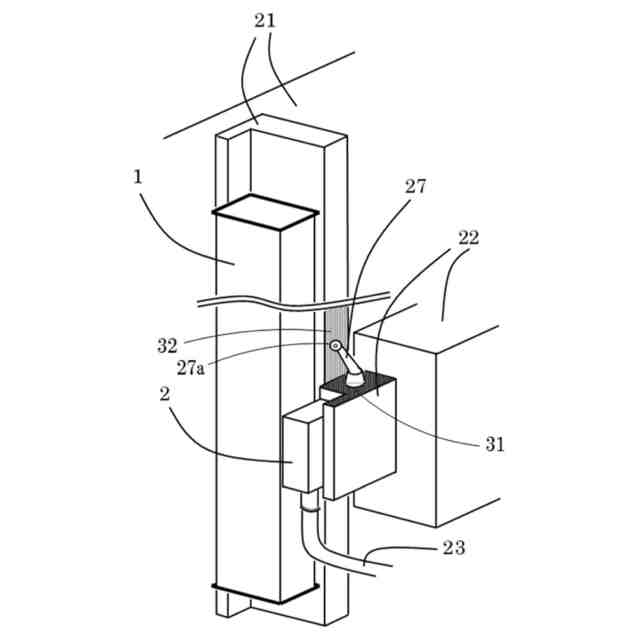
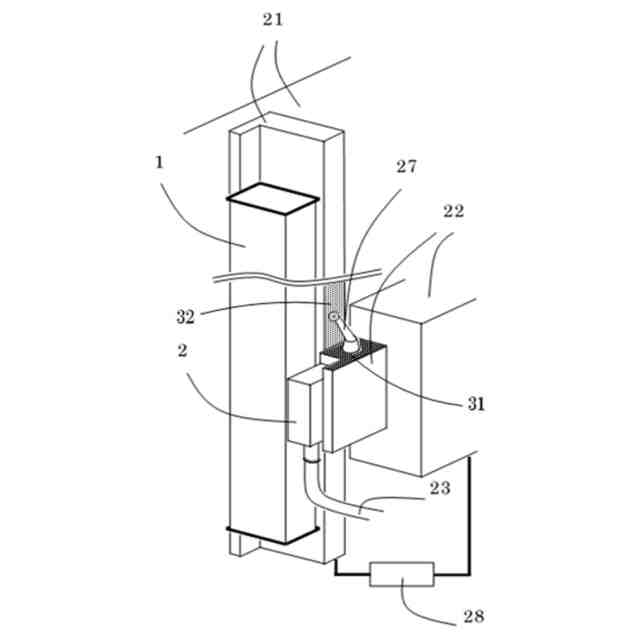
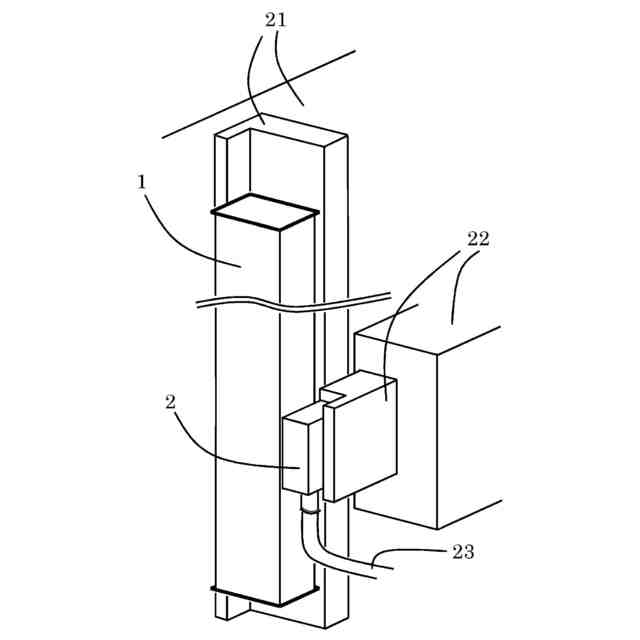
【解決手段】機械システムは、スケール1およびスライダ2を備えるリニアエンコーダと、固定部21および可動部22を備え前記リニアエンコーダが取付けられる機械と、前記スライダ2および前記スケール1の一方とそれぞれ導通する導通部31および接触部32と、前記導通部31に取付けられる接触子27とを備え、前記スケール1および前記スライダ2はそれぞれ前記固定部21および前記可動部22の一方に取付けられ、前記接触子27は前記可動部22の動作速度または前記可動部22と前記固定部21との間の接触抵抗が閾値を超えた場合、前記スケール1と前記スライダ2とが電気的に同電位となるよう前記接触部32と接触する。
【選択図】図1
特許請求の範囲
【請求項1】
スケールと、スライダと、を備えるリニアエンコーダと、
前記リニアエンコーダが取付けられる機械であって、固定部と、可動部と、を備える機械と、
前記スライダおよび前記スケールの一方と導通している導通部と、
前記スライダおよび前記スケールの他方と導通している接触部と、
前記導通部に取付けられる接触子と、
を備え、
前記スケールが前記固定部に取付けられる場合、前記スライダが前記可動部に取付けられており、前記スケールが前記可動部に取付けられる場合、前記スライダが前記固定部に取付けられており、
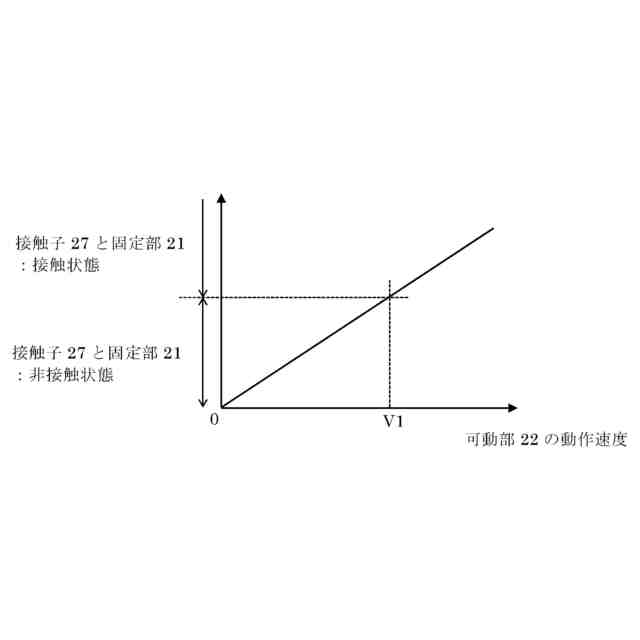
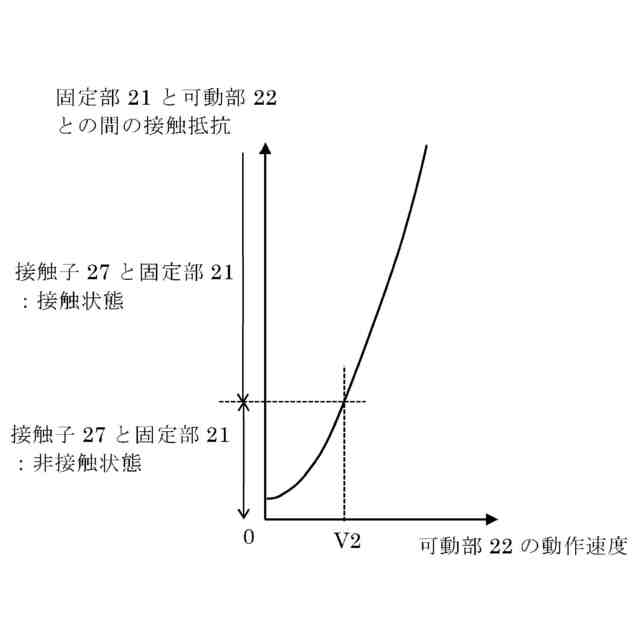
前記接触子は、前記可動部の動作速度、または、前記可動部と前記固定部との間の接触抵抗が閾値を超えた場合、前記スケールと前記スライダとが電気的に同電位となるように、前記接触部と接触する、
ことを特徴とする機械システム。
続きを表示(約 620 文字)
【請求項2】
前記スライダは、
前記可動部または前記固定部に取付けられたスライダフレームと、
受光ユニットと、
前記受光ユニットの信号増幅回路基板と、
前記信号増幅回路基板から出力された信号から前記スライダの位置を演算する信号演算回路基板と、
を備え、
前記信号増幅回路基板および前記信号演算回路基板は、前記スライダフレームとは絶縁分離されており、
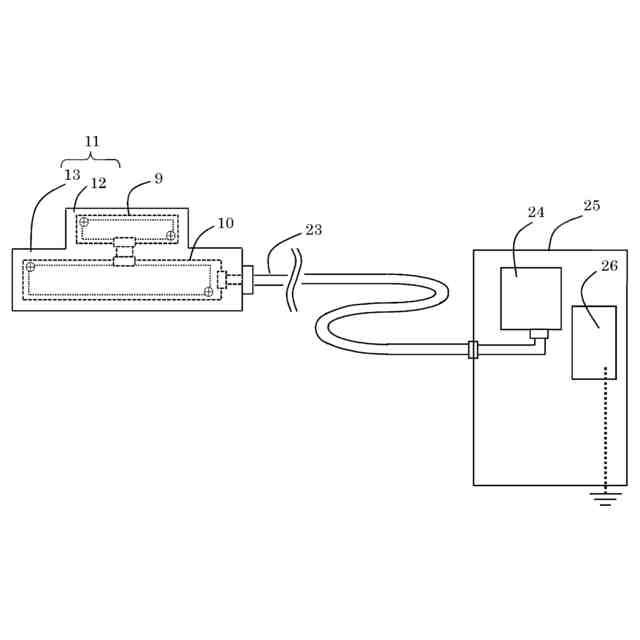
前記信号増幅回路基板および前記信号演算回路基板は、前記スライダに接続するケーブルを通じて前記機械と接続されることで、GND電位が安定したレベルとなる、
ことを特徴とする請求項1に記載の機械システム。
【請求項3】
前記導通部は前記可動部の一部であり、前記接触部は前記固定部の一部である、
ことを特徴とする請求項1に記載の機械システム。
【請求項4】
前記可動部と前記固定部とが接触している面は、すべりガイド面であり、
前記閾値は、前記可動部と前記固定部とが接触状態から非接触状態になるときの値を基準として規定されている、
ことを特徴とする請求項1に記載の機械システム。
【請求項5】
前記接触子の前記接触部と接触する側の先端には、前記接触子と接触して導通する導電性のローラが取付けられる、
ことを特徴とする請求項1に記載の機械システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、リニアエンコーダと、機械と、を備える機械システムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
NC工作機械などの送り軸を位置制御する場合、サーボモータに内蔵するロータリーエンコーダの検出位置の他に、テーブルやサドルなどに取付けたリニアエンコーダの検出位置によるフルクローズドループ制御を行うことで、高精度な位置決めが可能となる。これは、ボールネジのねじれ現象などにより、ロータリーエンコーダの検出位置のみでは高精度な位置制御が出来ないからである。リニアエンコーダには大きく分けて光学式および磁気式の2種類があるが、ここでは光学式について説明する。
【0003】
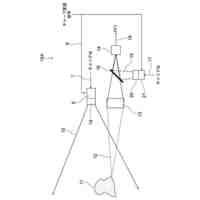
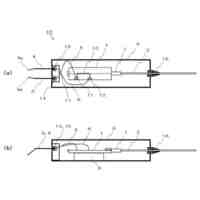
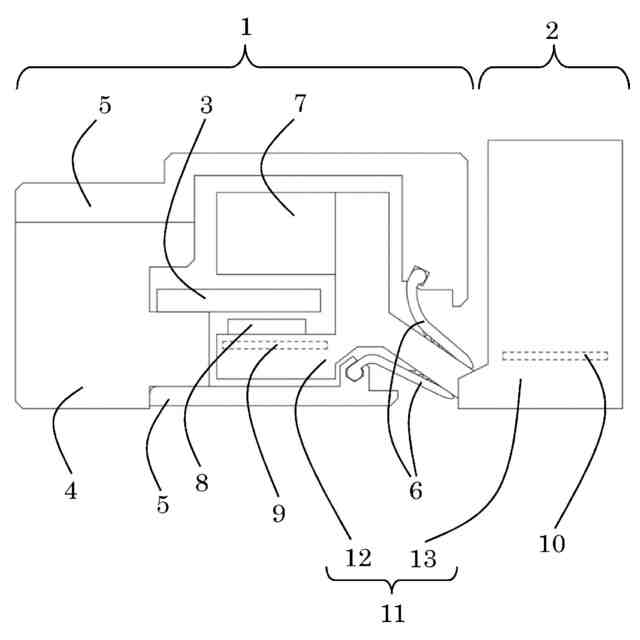
図6は、一般的な光学式リニアエンコーダの構造を示す図である。
【0004】
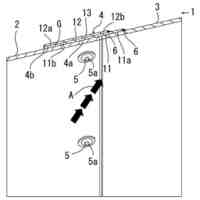
図6に示す光学式リニアエンコーダは、スケール1と、スライダ2と、メインスケール3と、スチールベース4と、アルミケース5と、リップシール6と、を備える。メインスケール3のガラス表面には、等間隔の格子目盛が形成されている。スチールベース4は、メインスケール3を内部に接着固定する。また、スチールベース4は、スケール1を機械に取付ける。アルミケース5は、スケール1内部に軸潤滑油や切削液、切粉などが入らないように設けられている。リップシール6は、スケール1内部の気密性を保つのと同時に、アルミケース5と同様にスケール1内部に軸潤滑油などが入らないように取付けられている。
【0005】
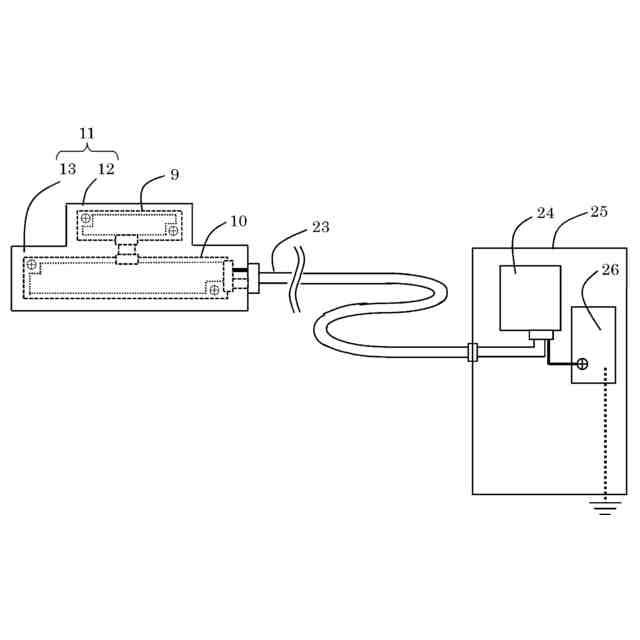
図6に示すように、光学式リニアエンコーダは、発光ユニット7と、受光ユニット8と、信号増幅回路基板9と、信号演算回路基板10と、スライダフレーム11と、受光ユニット取付け部分12と、機械取付け部分13と、をさらに備える。信号増幅回路基板9は、受光ユニット8の信号増幅回路基板である。発光ユニット7が出力する平行光のうち、メインスケール3の格子目盛を透過した平行光は、受光ユニット8および信号増幅回路基板9により電気信号に変換される。信号演算回路基板10は、信号増幅回路基板9から出力された信号からスライダ2の位置を演算する。スライダフレーム11は、スライダフレーム全体を指し、スライダフレーム11には、発光ユニット7、受光ユニット8、信号増幅回路基板9、および、信号演算回路基板10が取付けられる。受光ユニット取付け部分12は、受光ユニット8をスライダフレーム11に取付ける、スライダフレーム11の一部分である。機械取付け部分13は、スライダ2を機械に取付ける、スライダフレーム11の一部分である。
【0006】
また、光学式リニアエンコーダは、保護構造の有無により、シールドタイプおよびオープンタイプの2種類に分類される。図6に示すように、シールドタイプは、スライダ2やメインスケール3などをアルミケース5などで囲い、軸潤滑油や切削液、切粉などから保護する構造である。オープンタイプは、使われる環境がクリーンルームのような環境のため、スライダ2やメインスケール3などをアルミケース5などで囲わない構造である。
【0007】
以下、シールドタイプについて説明する。シールドタイプは、スライダフレームの構成により、次の2種類のタイプに分類される。1つ目は、スライダフレーム11が、受光ユニット取付け部分12および機械取付け部分13の2つの部位で構成され、両者がバネなどでつながる構造であり、受光ユニット取付け部分12が、スケール1内部のガイドに接触しながら移動するタイプである。2つ目は、スケール1内部にガイドは持たず、スライダフレーム11の受光ユニット取付け部分12と機械取付け部分13とは一体構造であり、受光ユニット取付け部分12はリップシール6以外とは非接触で移動するタイプである。
【0008】
上述した1つ目のシールドタイプは、受光ユニット取付け部分12と機械取付け部分13とが分離しており、受光ユニット取付け部分12とメインスケール3との干渉が防止されるため、受光ユニット取付け部分12は、スケール1内部のガイドに接触しながら移動する。このため、スライダ2を機械に取付けるときは、特に注意する必要が無い。しかし、分離構造であるため、受光ユニット取付け部分12と機械取付け部分13との間にはロストモーションが発生し、このロストモーションが位置検出精度に影響する可能性がある。
【0009】
上述した2つ目のシールドタイプは、受光ユニット取付け部分12と機械取付け部分13とが一体構造のため、ロストモーションは発生しない。かかる構造では、スライダ2の機械への取付けを正確に行うことにより、受光ユニット取付け部分12とメインスケール3との干渉が防止される。したがって、スライダ2の機械への取付け精度が悪いと、スケール1内部で受光ユニット取付け部分12とメインスケール3とが干渉する可能性がある。
【0010】
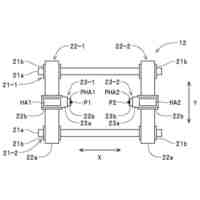
次に、リニアエンコーダが取付けられる機械側について説明する。スケール1およびスライダ2は機械の固定部や可動部に取付けられる。スケール1が固定部に取付けられ、スライダ2が可動部に取付けられる場合もあれば、スケール1が可動部に取付けられ、スライダ2が固定部に取付けられる場合もある。固定部の一例としては、ベッドやサドルなどがある。可動部の一例としては、テーブルやラムなどがある。また、機械の固定部および可動部は、すべりガイド面やころがりガイド面、静圧ガイド面などで組み合わされる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オークマ株式会社
機械システム
15日前
オークマ株式会社
工作機械用カバー装置
2か月前
オークマ株式会社
心押センタの異常検知方法及び心押センタの異常検知装置
12日前
個人
微小振動検出装置
1日前
ユニパルス株式会社
力変換器
22日前
株式会社イシダ
X線検査装置
1日前
三菱電機株式会社
計測器
16日前
横浜ゴム株式会社
音響窓
24日前
日置電機株式会社
測定装置
23日前
株式会社辰巳菱機
システム
10日前
個人
センサーを備えた装置
26日前
日本精機株式会社
施工管理システム
26日前
IPU株式会社
距離検出装置
22日前
株式会社東芝
センサ
1日前
株式会社FRPカジ
FRP装置
12日前
株式会社東芝
センサ
25日前
株式会社精工技研
光電圧プローブ
2日前
大和製衡株式会社
組合せ計量装置
12日前
日本精工株式会社
分注装置
8日前
株式会社カワタ
サンプリング装置
5日前
学校法人立命館
液面レベルセンサ
9日前
TDK株式会社
ガスセンサ
4日前
富士レビオ株式会社
嵌合システム
15日前
アズビル株式会社
火炎状態判定装置
23日前
三菱マテリアル株式会社
温度センサ
8日前
富士電機株式会社
半導体パッケージ
18日前
本多電子株式会社
超音波ソナー装置
17日前
戸田建設株式会社
測量機
8日前
三和テッキ株式会社
架線の高さ、偏位測定装置
10日前
トヨタ自動車株式会社
データの補正方法
17日前
東ソー株式会社
クロマトグラムの形状判定方法
18日前
トヨタ自動車株式会社
表面傷の検査方法
24日前
株式会社ダイフク
搬送設備
1日前
已久工業股ふん有限公司
空気圧縮機構造
25日前
株式会社豊田自動織機
自律走行車
2日前
株式会社エイアンドティー
電解質分析装置
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ