TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025122585
公報種別
公開特許公報(A)
公開日
2025-08-21
出願番号
2024018194
出願日
2024-02-08
発明の名称
速度計測装置、速度計測方法および速度計測プログラム
出願人
古野電気株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G01S
19/52 20100101AFI20250814BHJP(測定;試験)
要約
【課題】速度の計測精度の低下を抑えることができる速度計測装置、速度計測方法および速度計測プログラムを提案すること。
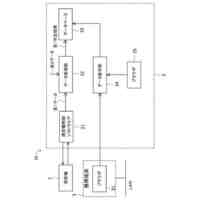
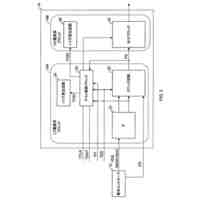
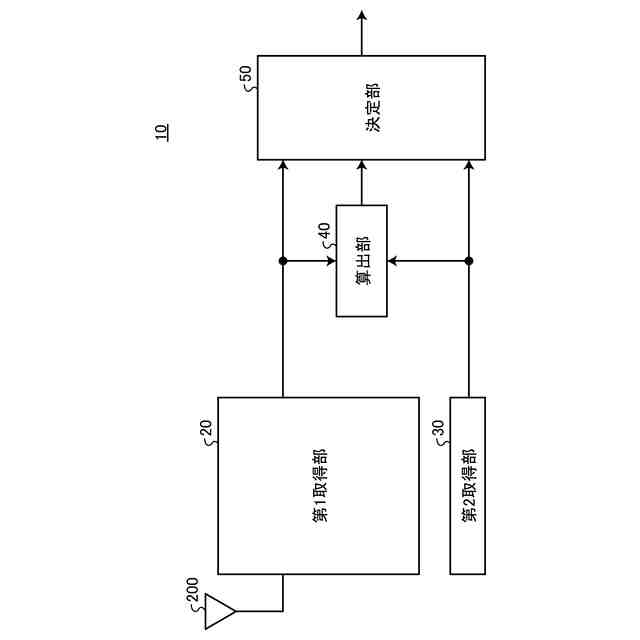
【解決手段】速度計測装置は、第1取得部と、第2取得部と、算出部とを備える。第1取得部は、GNSS測位により移動体の速度ベクトルであるGNSSベクトルを取得する。第2取得部は、デッドレコニング測位により移動体の速度ベクトルであるDRベクトルを取得する。算出部は、移動体が旋回中である場合に、移動体の角速度、GNSSベクトルおよびDRベクトルに基づいて、DRベクトルを補正する補正値を算出する。
【選択図】図1
特許請求の範囲
【請求項1】
GNSS測位により移動体の速度ベクトルであるGNSSベクトルを取得する第1取得部と、
デッドレコニング測位により前記移動体の速度ベクトルであるDRベクトルを取得する第2取得部と、
前記移動体が旋回中である場合に、前記移動体の角速度、前記GNSSベクトルおよび前記DRベクトルに基づいて、前記DRベクトルを補正する補正値を算出する算出部と
を備える速度計測装置。
続きを表示(約 1,500 文字)
【請求項2】
前記算出部は、
前記角速度および前記GNSSベクトルに基づいて算出した第1旋回半径と、前記角速度および前記DRベクトルに基づいて算出した第2旋回半径との差が閾値未満である場合に、前記補正値を算出する
請求項1に記載の速度計測装置。
【請求項3】
前記算出部は、
前記GNSSベクトルおよび前記DRベクトルの起点それぞれと旋回中心とのなす角に基づいて前記補正値を算出する
請求項2に記載の速度計測装置。
【請求項4】
前記算出部は、
前記GNSSベクトルおよび前記DRベクトルの起点それぞれと前記旋回中心とからなる二等辺三角形の底辺および底角を算出し、前記底辺および前記底角に基づいて、前記GNSSベクトルおよび前記DRベクトルの前記移動体における全長方向への位置差を補正する前記補正値を算出する
請求項3に記載の速度計測装置。
【請求項5】
前記算出部は、
前記GNSSベクトルおよび前記DRベクトルの方位の大小関係と、前記角速度に基づく旋回方向とに基づいて、前記GNSSベクトルおよび前記GNSSベクトルの前記全長方向における位置関係を特定する
請求項4に記載の速度計測装置。
【請求項6】
前記算出部は、
前記GNSSベクトルおよび前記DRベクトルの前記移動体における全長方向への位置差を底辺、前記DRベクトルに基づくDR旋回半径を高さとする直角三角形に基づいて、斜辺である前記GNSSベクトルに基づくGNSS旋回半径を算出し、前記GNSS旋回半径および前記第1旋回半径に基づいて、前記GNSSベクトルおよび前記DRベクトルの前記移動体における幅方向への位置差を補正する前記補正値を算出する
請求項4に記載の速度計測装置。
【請求項7】
前記算出部は、
前記GNSS旋回半径および前記第1旋回半径の大小関係と、前記角速度に基づく旋回方向とに基づいて、前記GNSSベクトルおよび前記GNSSベクトルの前記幅方向における位置関係を特定する
請求項6に記載の速度計測装置。
【請求項8】
前記補正値により補正した前記DRベクトルと、前記GNSSベクトルとに基づいて、前記移動体の測位位置を決定する決定部をさらに備える
請求項1に記載の速度計測装置。
【請求項9】
コンピュータによって実行される速度計測方法であって、
GNSS測位により移動体の速度ベクトルであるGNSSベクトルを取得する第1取得工程と、
デッドレコニング測位により前記移動体の速度ベクトルであるDRベクトルを取得する第2取得工程と、
前記移動体が旋回中である場合に、前記移動体の角速度、前記GNSSベクトルおよび前記DRベクトルに基づいて、前記DRベクトルを補正する補正値を算出する算出工程と
を含む速度計測方法。
【請求項10】
GNSS測位により移動体の速度ベクトルであるGNSSベクトルを取得する第1取得手順と、
デッドレコニング測位により前記移動体の速度ベクトルであるDRベクトルを取得する第2取得手順と、
前記移動体が旋回中である場合に、前記移動体の角速度、前記GNSSベクトルおよび前記DRベクトルに基づいて、前記DRベクトルを補正する補正値を算出する算出手順と
をコンピュータに実行させる速度計測プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、速度計測装置、速度計測方法および速度計測プログラムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来、GNSS(Global Navigation Satellite System)によるGNSS測位と、ジャイロセンサや加速度センサ等のセンサを用いることで、GNSS信号に寄らずに測位を行うDR(Dead Reckoning:デッドレコニング)測位とを用いて移動体の速度の計測を行う技術が知られている(例えば、特許文献1参照)。この種の技術では、GNSS測位およびデッドレコニング測位(以下、DR測位)それぞれから生成した2つ速度ベクトルに基づいて移動体の速度を計測する。
【先行技術文献】
【特許文献】
【0003】
特許第6199535号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、移動体が旋回する際に、GNSS測位による測位位置と、DR測位による測位位置に差異がある場合、2つの速度ベクトルにノルム差や方位差が生じてしまい、速度の計測精度が低下するおそれがあった。
【0005】
そこで、本開示では、速度の計測精度の低下を抑えることができる速度計測装置、速度計測方法および速度計測プログラムを提案する。
【課題を解決するための手段】
【0006】
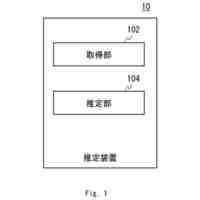
上記の課題を解決するために、本開示に係る速度計測装置は、第1取得部と、第2取得部と、算出部とを備える。前記第1取得部は、GNSS測位により移動体の速度ベクトルであるGNSSベクトルを取得する。前記第2取得部は、デッドレコニング測位により前記移動体の速度ベクトルであるDRベクトルを取得する。前記算出部は、前記移動体が旋回中である場合に、前記移動体の角速度、前記GNSSベクトルおよび前記DRベクトルに基づいて、前記DRベクトルを補正する補正値を算出する。
【0007】
これにより、速度計測装置は、速度の計測精度の低下を抑えることができる。
【0008】
また、本開示に係る前記算出部は、前記角速度および前記GNSSベクトルに基づいて算出した第1旋回半径と、前記角速度および前記DRベクトルに基づいて算出した第2旋回半径との差が閾値未満である場合に、前記補正値を算出する。
【0009】
これにより、速度計測装置は、速度の計測精度の低下を抑えることができる。
【0010】
また、本開示に係る前記算出部は、前記GNSSベクトルおよび前記DRベクトルの起点それぞれと旋回中心とのなす角に基づいて前記補正値を算出する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
古野電気株式会社
航路計画システム及び航路計画方法
1か月前
古野電気株式会社
電磁波整合装置、電磁波通過装置、及び壁
3日前
古野電気株式会社
海況推定装置、海況推定方法およびプログラム
26日前
古野電気株式会社
航行支援システム、航行支援方法、及びプログラム
1か月前
古野電気株式会社
速度計測装置、速度計測方法および速度計測プログラム
1か月前
古野電気株式会社
レーダ装置、レーダ映像表示方法およびレーダ映像表示プログラム
19日前
古野電気株式会社
海洋水産資源量予測装置、海洋水産資源量予測方法、海洋水産資源量予測プログラム
4日前
大和製衡株式会社
組合せ秤
3日前
大和製衡株式会社
組合せ秤
3日前
株式会社東芝
センサ
3日前
株式会社東芝
センサ
3日前
アンリツ株式会社
物品検査装置
3日前
株式会社豊田自動織機
制御装置
3日前
新光電気工業株式会社
測定装置及び測定方法
3日前
日本電気株式会社
推定装置、推定方法及びプログラム
3日前
日本電気株式会社
推定装置、推定方法及びプログラム
3日前
富士電機株式会社
測定方法及び製造方法
3日前
トヨタ自動車株式会社
車両用表示制御装置
3日前
日本電気株式会社
選定装置、推定システム、選定方法、及びプログラム
3日前
株式会社東京精密
コントローラ、及び、監視システム
3日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
3日前
パイオニア株式会社
情報処理装置、情報処理方法、プログラム及び記憶媒体
3日前
ローム株式会社
データドライバ及び半導体装置
3日前
ローム株式会社
検知回路、検知方法、電源回路およびデータ記憶システム
3日前
株式会社デンソー
レーダシステム、レーダ制御方法、レーダ制御プログラム
3日前
横河電機株式会社
光ファイバ特性測定装置及び光ファイバ特性測定方法
3日前
Siddarmark合同会社
カーボンナノチューブヤーンからなる圧力及び触感センサー
3日前
三菱マテリアル株式会社
融解凝固センサ素子、及び、融解凝固センサ
3日前
アンリツ株式会社
分光測定装置及びこれを備えた物品検査装置
3日前
太平洋セメント株式会社
コンクリートの乾燥収縮ひずみ、および乾燥収縮応力の予測方法
3日前
警察庁科学警察研究所長
放射線検出装置
3日前
オムロン株式会社
光電センサ、光電センサの制御プログラムおよび光電センサの制御方法
3日前
株式会社OptoComb
外観検査方法、3次元外観検査装置及び3次元外観検査システム
3日前
ソフトバンク株式会社
システム、情報処理装置、プログラム、及び方法
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ