TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025124015
公報種別
公開特許公報(A)
公開日
2025-08-25
出願番号
2024019857
出願日
2024-02-13
発明の名称
走行支援方法及び走行支援装置
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/08 20120101AFI20250818BHJP(車両一般)
要約
【課題】障害物を回避する回避走行を行う際に、他車両と自車両とが車線を譲り合って互いに停止し続けてしまう事態を防止する。
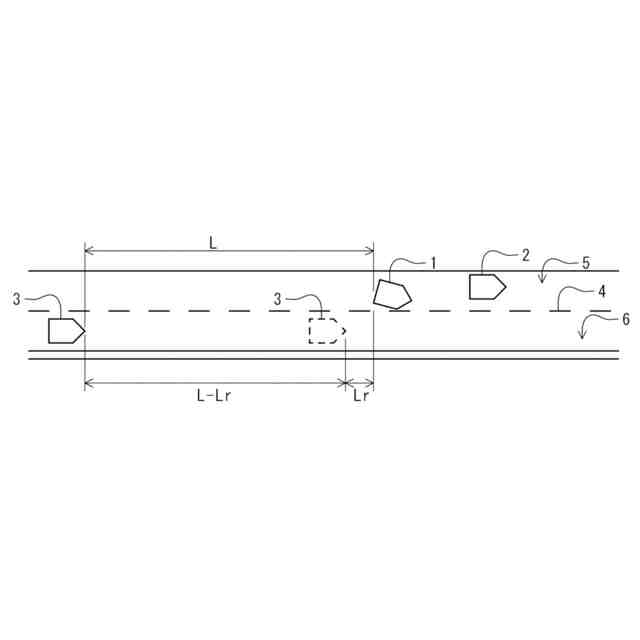
【解決手段】他車両3の走行状態が、自車両1に車線6を譲る意思があることを示す基準条件を満たす場合、障害物2を回避するための操舵から境界線4に平行に走行するように操舵する等の処理を行い、他車両3に障害物2を回避するつもりがない旨の意思表示をする。一方、他車両3の走行状態が基準条件を満たさない場合は、他車両3は、自車両1に車線6を譲る意思がないので、障害物2を回避する走行状態を維持し、他車両3の通過を待機する。
【選択図】図3B
特許請求の範囲
【請求項1】
自車両が走行車線の障害物に対して停止した後、隣接車線に進入して前記障害物を回避する際に、自車両が車線境界線を跨ぐ前に前記隣接車線を走行する他車両がある場合には当該他車両の走行状態を検出し、
検出した走行状態が予め定められた基準条件を満たさないときは、前記障害物を回避するための操舵を維持した状態で前記走行車線内に自車両を停止させ、
検出した走行状態が予め定められた基準条件を満たすときは、前記障害物を回避するための操舵から前記走行車線に戻す操舵をして前記走行車線内に自車両を停止させる、
走行支援方法。
続きを表示(約 860 文字)
【請求項2】
前記基準条件は、検出した走行状態のうちの加速度が加速度閾値以下であること、検出した走行状態のうちの速度が速度閾値以下であること、検出した走行状態が、前記他車両が車線を譲ることを示していること、の少なくともいずれか1つを含むという条件である、
請求項1に記載の走行支援方法。
【請求項3】
前記他車両と自車両との距離に応じて、前記基準条件を変更する、
請求項1に記載の走行支援方法。
【請求項4】
前記基準条件は、検出した走行状態が維持されると仮定した場合に、前記他車両が自車両に前記隣接車線への進入を譲る位置に止まるか否かである、
請求項3に記載の走行支援方法。
【請求項5】
前記他車両と自車両との距離が前記他車両の前記走行状態を検出したときより離れた場合には、前記基準条件を変更する
請求項1に記載の走行支援方法。
【請求項6】
前記他車両が、自車両と反対側の走行車線に向けて操舵した場合には、前記基準条件を厳格化する、
請求項5に記載の走行支援方法。
【請求項7】
検出した走行状態が予め定められた基準条件を満たすときに実行する前記走行車線に戻す操舵は、自車両を車線の境界線に平行にするまでの範囲の操舵である
請求項1に記載の走行支援方法。
【請求項8】
自車両が停止する際に車線の境界線を跨いだ場合には、前記走行車線に戻る操舵をして前記走行車線内に自車両を停止させる、
請求項1に記載の走行支援方法。
【請求項9】
前記障害物を回避する操舵から前記走行車線に戻る操舵をする場合に、方向指示器の動作を変更する、
請求項1に記載の走行支援方法。
【請求項10】
前記方向指示器の点灯動作の変更は、点滅動作を中止することを含む、
請求項9に記載の走行支援方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行支援方法及び走行支援装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、前方の停止車両の横位置に応じて、自車両の停止位置を変えることにより、停止車両を回避するための回避走行をスムーズに行うことができる車両用走行制御装置が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2016-112911号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自車両が回避走行を実行中に、隣接車線の後方を走行する他車両がこれを認識し、減速して、隣接車線を自車両に譲る場合がある。特許文献1では、回避走行を行う際に、他車両の挙動までは考慮していない。このため、自車両と他車両とが譲り合って、停止し続けてしまうおそれがある。
【0005】
同様の問題は、自車両の停止の原因が前方の停止車両である場合に限られず、車線減少、道路工事等様々な障害物を回避する回避走行を行う場合に発生する。
【0006】
本発明は、上記実情に鑑みてなされたものであり、車線境界線を跨ぐ回避走行の際に、他車両と自車両とが停止し続けてしまう事態の発生を低減することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の走行支援方法は、隣接車線に進入して障害物を回避する際に、隣接車線を走行する他車両がある場合、他車両の走行状態を検出し、検出した走行状態が予め定められた基準条件を満たすときは、障害物を回避するための操舵から走行車線に戻す操舵をして走行車線内に自車両を停止させる。
【発明の効果】
【0008】
本発明の走行支援方法において、予め定められた基準条件は、例えば、他車両が自車両に車線を譲る意思を示しているか否かを推定するための条件である。基準条件が満たされる場合、自車両を障害物を回避する操舵から走行車線に戻す操舵をして走行車線内に停止させる。このため、他車両は自車両に車線を譲るのではなく、自車両を追い越して先に行く傾向が高くなる。これにより、車線の譲り合いが減少する。
【図面の簡単な説明】
【0009】
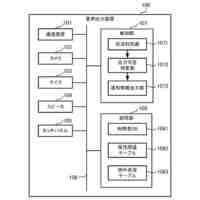
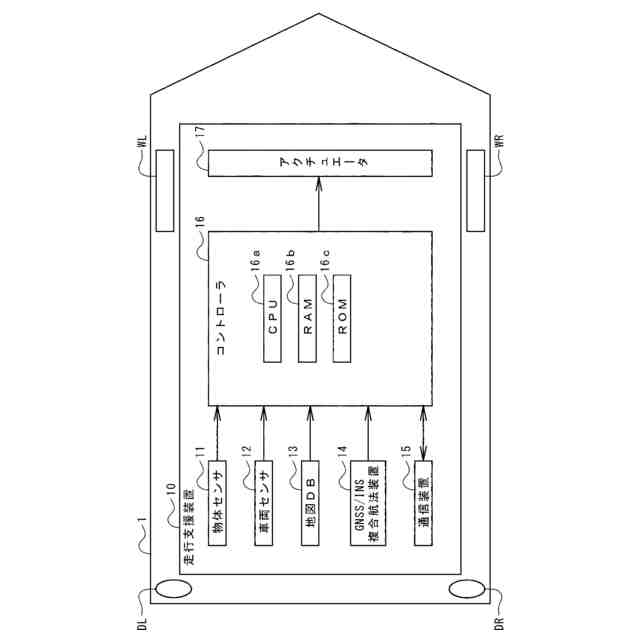
この発明の実施の形態に係る走行支援装置の構成図である。
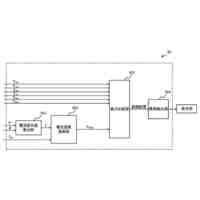
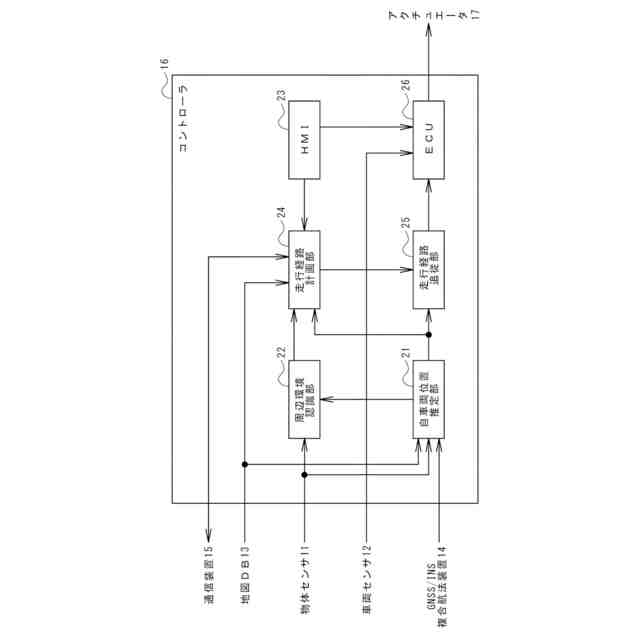
図1に示すコントローラの構成図である。
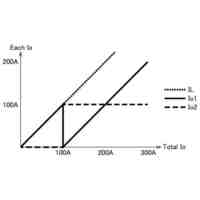
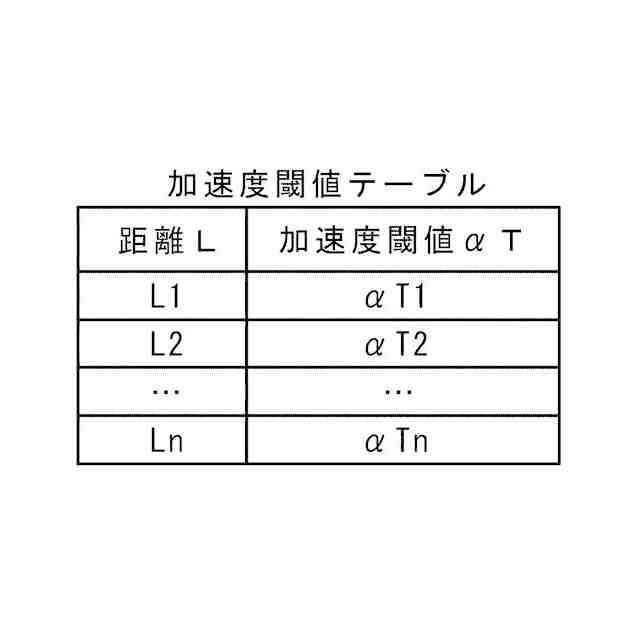
図1に示すROMに格納される加速度閾値テーブルの構成例を示す図である。
図3Aに示す加速度閾値テーブルに格納される加速度閾値を説明するための図である。
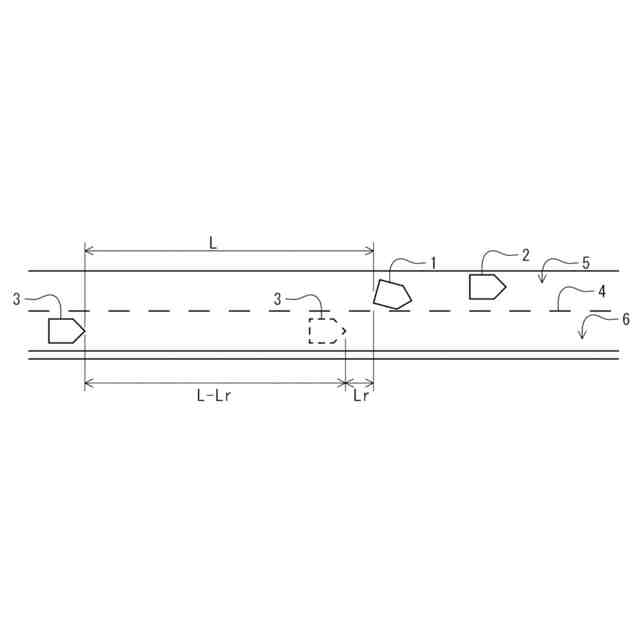
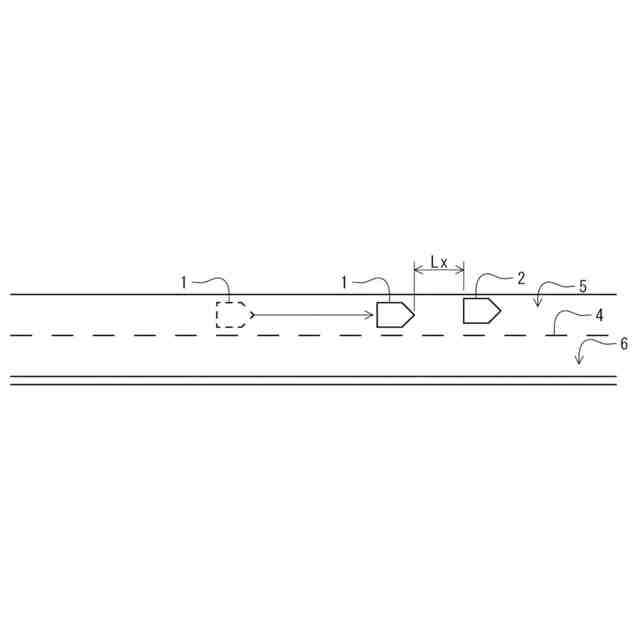
実施の形態に係る障害物回避処理を説明するための説明図である。
実施の形態に係る障害物回避処理を説明するための説明図である。
実施の形態に係る障害物回避処理を説明するための説明図である。
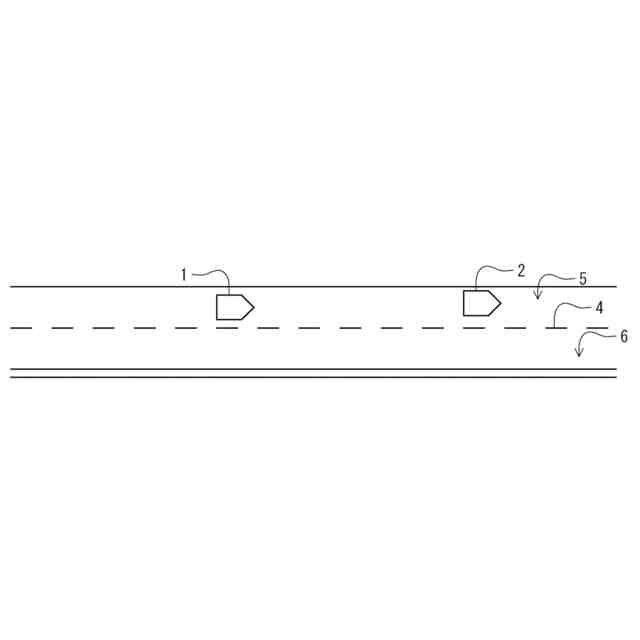
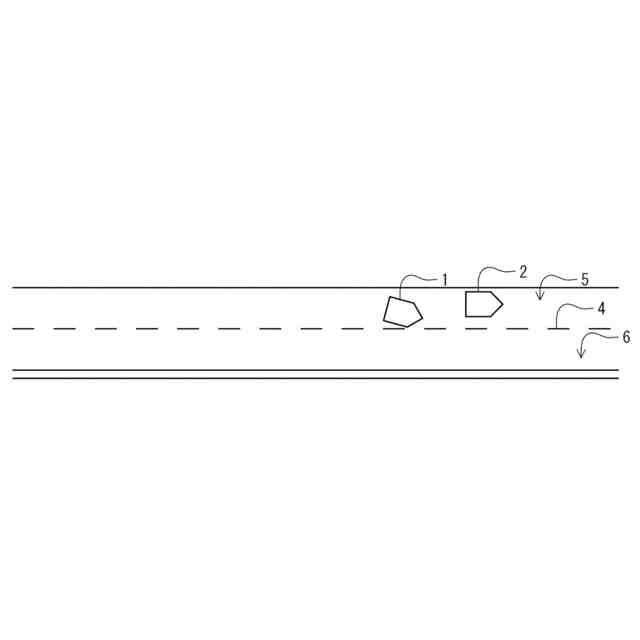
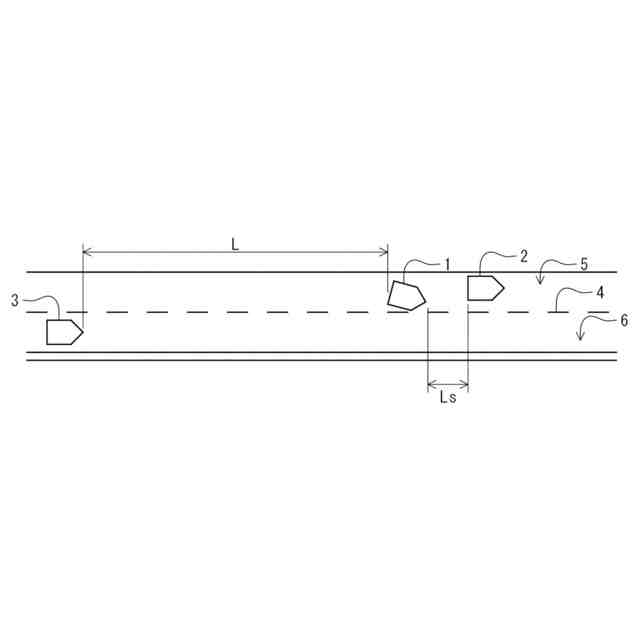
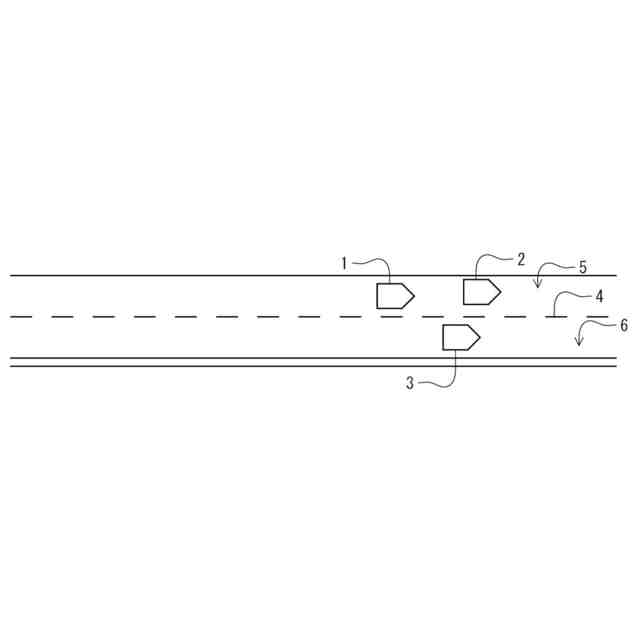
実施の形態に係る譲り合い防止処理を説明するための説明図である。
実施の形態に係る譲り合い防止処理を説明するための説明図である。
実施の形態に係る譲り合い防止処理を説明するための説明図である。
実施の形態に係る障害物回避処理での操舵を説明するための説明図である。
実施の形態に係る障害物回避処理での操舵を説明するための説明図である。
実施の形態に係る障害物回避処理での操舵を説明するための説明図である。
実施の形態に係る譲り合い防止処理での操舵を説明するための説明図である。
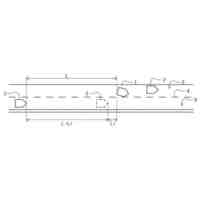
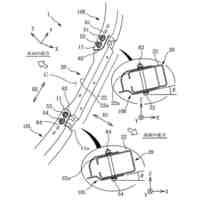
自車両が障害物を回避して走行する様子を示す図である。
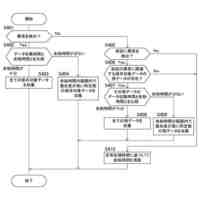
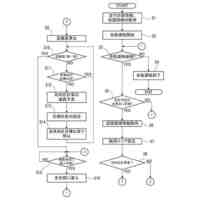
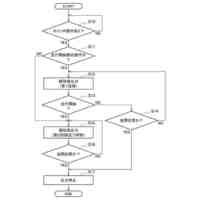
実施の形態に係る障害物回避処理のフローチャートである。
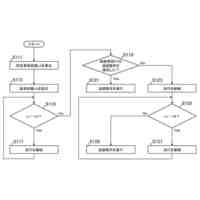
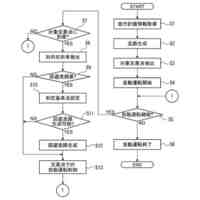
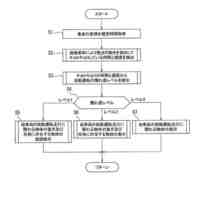
実施の形態に係る譲り合い防止処理のフローチャートである。
機械学習の一例を説明するための図である。
応用例1に係る譲り合い防止処理の説明図である。
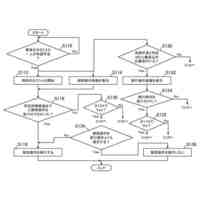
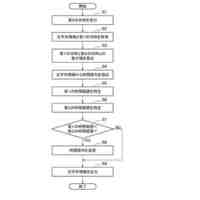
応用例1に係る譲り合い防止処理のフローチャートである。
応用例2に係る譲り合い防止処理の変形例を説明するための説明図である。
応用例2に係る譲り合い防止処理のフローチャートである。
【発明を実施するための形態】
【0010】
(実施の形態)
以下、本発明の実施の形態に係る走行支援方法と走行支援装置を説明する。
本実施の形態の走行支援方法及び走行支援装置は、基本的には、自車両の前方に障害物を発見すると、走行する車線を変更して走行を継続する。ただし、障害物を回避して隣接車線に進入する動作(障害物回避走行)を行っている際に、隣接車線後方に他車両を検出すると、その他車両が自車両に車線を譲る意思があるか否かを推定する。車線を譲る意思があると推定した場合、自車両を、あえて、隣接車線への進入の意思を否定する態様に調整する。これにより、他車両の走行が促され、自車両と他車両の譲り合いによる両車両の停止を防止する。走行支援方法及び走行支援装置は、他車両の通過後に、自車両の障害物回避走行を再開させる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日産自動車株式会社
内燃機関
16日前
日産自動車株式会社
ターボ過給機
18日前
日産自動車株式会社
電力変換装置
3日前
日産自動車株式会社
電力変換装置
18日前
日産自動車株式会社
バッテリケース
2日前
日産自動車株式会社
車両の遮熱構造
2日前
日産自動車株式会社
電動車両の駆動装置
10日前
日産自動車株式会社
電動車両の駆動装置
13日前
日産自動車株式会社
車両の排気管支持構造
24日前
日産自動車株式会社
頭部装着型の情報提示装置
5日前
日産自動車株式会社
制御方法及び制御システム
13日前
日産自動車株式会社
車両管理方法及び車両管理装置
24日前
日産自動車株式会社
配車管理装置及び配車管理方法
23日前
日産自動車株式会社
情報処理方法及び車両制御装置
12日前
日産自動車株式会社
情報処理方法及び緊急制御装置
10日前
日産自動車株式会社
配車管理装置及び配車管理方法
3日前
日産自動車株式会社
配車管理装置及び配車管理方法
3日前
日産自動車株式会社
走行支援方法及び走行支援装置
6日前
日産自動車株式会社
車両制御方法、及び車両制御装置
9日前
日産自動車株式会社
車両制御方法、及び車両制御装置
6日前
日産自動車株式会社
文字列操作方法及び文字列操作装置
9日前
日産自動車株式会社
電動パワートレイン支持体及び車両
6日前
日産自動車株式会社
充放電制御方法及び充放電制御装置
12日前
日産自動車株式会社
車両の捩り振動制振方法および装置
23日前
日産自動車株式会社
車両ドア制御方法及び車両ドア制御装置
5日前
日産自動車株式会社
覚醒状態判別方法及び覚醒状態判別装置
25日前
日産自動車株式会社
音声出力方法、音声出力装置及びプログラム
5日前
日産自動車株式会社
車両用表示制御方法及び車両用表示制御装置
23日前
日産自動車株式会社
表示制御方法、情報表示システム及び表示制御装置
5日前
日産自動車株式会社
インバータの制御方法、及び、インバータの制御装置
18日前
日産自動車株式会社
電動車両の熱制御方法、及び電動車両の熱制御システム
18日前
日産自動車株式会社
情報処理方法、情報処理装置及びコンピュータプログラム
5日前
日産自動車株式会社
インバータの異常検出方法及びインバータの異常検出システム
12日前
日産自動車株式会社
乗員の睡眠時姿勢崩れ防止方法および睡眠時姿勢崩れ防止装置
17日前
日産自動車株式会社
DC/DCコンバータの制御方法、及び、DC/DCコンバータの制御装置
23日前
日産自動車株式会社
充放電制御システム、充放電制御方法、インバータ制御装置及びリレー制御装置
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ